基于UE4 的井下变电所巡检机器人数字孪生系统
2021-11-23方世巍赵红菊
李 新,李 飞,方世巍,赵红菊
(1.国家能源集团神东煤炭集团公司石圪台煤矿,陕西神木 719300;2.中煤科工集团沈阳研究院有限公司,辽宁抚顺 113122;3.煤矿安全技术国家重点实验室,辽宁抚顺 113122)
变电所作为煤矿安全的重要巡检内容之一,具有空气湿度大、暗黑弱光以及有害气体多等复杂非结构化环境特征,工作环境相对恶劣,且由于机电设备数量多,布置分散,串联特征比较明显,一旦发生故障很容易对生产线产生重大影响。目前井下变电所巡检仍然采用人工巡检、就地操作,工作重复性高,耗费了大量人力但还是不能掌握变电所的实时运行情况。只有异常发生后,才能“事后响应”,存在极大的安全隐患。随着国家智慧化矿山建设要求的提出,井下变电所的自动化和信息化势在必行。
为此,提出的一种新的井下变电所巡检机器人数字孪生系统,以变电所智能巡检机器人为基础平台,采用虚拟现实技术为核心,通过采集巡检机器人各种传感器的实时运行数据和控制系统的各种实时参数,构建可视化的远程监控;同时给出采集的历史数据,并且通过经验或者机器学习建立关键设备参数、检验指标的监控策略,实现趋势预测,基于预测结果,对事故预警和维修策略进行优化,降低和避免客户因为非计划停机带来的损失,实现全部巡检过程的可视化监控[1-6]。
1 井下变电所巡检机器人数字孪生系统
井下变电所巡检机器人数字孪生系统以UE4为开发平台,借助UE4 的编程语言-蓝图,实现井下变电所的日常巡检以及报警、预警的功能。UE4 是Epic Games 公司最新推出的虚幻引擎,是一款可用于三维场景构建的虚拟现实软件,其独特的Cascade编辑器可以创建复杂火焰、烟雾等所需的工具;强大的渲染功能以及低消耗的GPU 粒子模拟能够在1 个场景中设置数以千计的动态光源和粒子特效。同时UE4 能够导入3D Max 等外部建模软件模型,使得场景更加丰富和逼真;其蓝图以及C++源码可以根据任务需求在源代码的基础上开发自己想要的功能实现人机交互,也可以通过编程实现与外部数据的通信[7-10]。
基于UE4 的井下变电所巡检机器人数字孪生系统支持定点巡检、自动巡检,采集巡检机器人的巡检状态,包括位置信息、导航路径识别、自定义任务等,同时预留扩展接口便于后续功能开发。该系统主要包含3 大模块:环境巡检漫游模块、中央控制模块以及系统接口管理模块。井下变电所巡检机器人数字孪生系统功能结构图如图1。
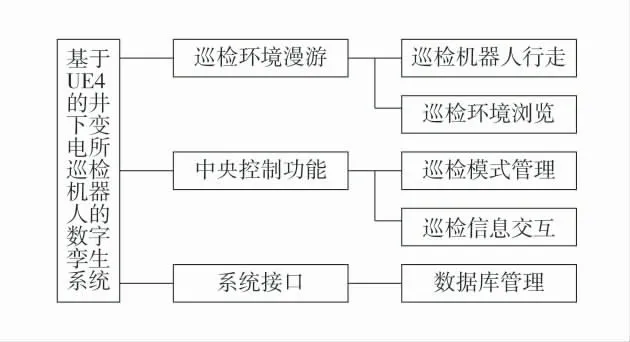
图1 井下变电所巡检机器人数字孪生系统功能结构图Fig.1 System function structure diagram
2 功能设计
2.1 巡检环境漫游
数字孪生系统的环境漫游设计流程如下:
1)通过对变电所内各个实体要素的几何空间位置、模型结构关系进行梳理和确认,采用分层结构和面向对象相结合的数据结构来确定空间环境的层次结构。
2)在3D Max 软件中,对井下变电所场景内的各种设备(包括巡检机器人、变压器、真空馈电开关、管路阀门以及消防用品等等)进行逐个建摸并结合。模型建好后以fbx 格式导入UE4 中。
3)为进行真实模拟,将上述建立的模型赋予材质。以纹理贴图作为输入,通过蓝图的WorldAlignedTexture 节点对材质进行改造,从而保证贴图的缩放比例不会影响其位置变化。同时还进行金属度、粗糙度等属性调节,使得材质更加逼真。
4)接收巡检机器人本体上的可升降摄像云台、烟雾、多参数气体、温湿度以及粉尘浓度传感器的实时数据和控制系统的各种参数,通过实时查询数据库中的当前数据,驱动程序内UE4 场景各模型运转,执行相应的动作。
5)该数字孪生系统可适配HTC-VIVE 虚拟现实眼镜,由眼镜获取变电多场景画面,操作者可以获得置身于虚拟环境中的逼真感受。
2.2 中央控制功能
中央控制模块作为数字孪生系统的控制核心,可以完成井下变电所的交互控制、巡检模式指令切换以及巡检信息交互等主要功能。
2.2.1 巡检模式管理
通过实时监测井下变电所的运行参数,制定出合理的巡检路线,会让变电所的管理工作更加井序有然、高效便捷。操作者根据任务需要,由数字孪生系统下发巡检模式指令(通过对数据库中开始巡检字段以及巡检模式字段的修改),巡检机器人接收到开始巡检的指令,执行相应的巡检任务。
1)自动巡检。巡检机器人接收自动巡检指令后,根据数据库中的自动巡检任务信息开始巡检。自动巡检任务中包含巡检位置二维码信息以及当前每个位置信息对应的摄像云台高度、角度信息以及其它传感器检测数据。巡检机器人在自动巡检时会根据任务制定的预设路线移动,同时也会将实时位置信息返回数据库中指定字段,将数字孪生系统中的机器人与井下变电所中的机器人实现同步。此外,巡检机器人执行任务时获取的数据信息也会反馈到数据库中,数字孪生系统可根据数据库中更新的数据信息判断、筛选展示在UI 界面上的内容。在巡检过程中可以执行巡检暂停、停止等相关操作。
2)定点巡检。在数字孪生系统UI 界面里,可点击任意井下变电所内部的机电设备进行指定的定点巡检。数据库中接收到指定设备的位置信息后,巡检机器人会根据该位置信息找到对应位置,并执行相应的巡检任务。其巡检过程中的数据传输与移动操作与自动巡检相同。
2.2.2 巡检信息交互
数字孪生系统支持原始巡检数据的保存和备份,提供历史轨迹回放、工作情况等重现和可追溯,能够随时调阅历史资料,实现数据的智能统计分析。当故障问题出现的时候,可以第一时间提示管理人员进行处理和调度,并且能够展现隐患现场及时加以处理。同时结合现场和数据掌握隐患分布,调整区域巡查力度,实时掌握工作重点,防患于未然。
该系统的信息交互包含单次巡检报表查询、历史曲线查询、报警历史信息查询等等,通过操作界面的各种报表可以直观的展示统计信息,提升对巡检数据的理解能力。
1)单次巡检报表界面展示的是当次巡检结果的设备和环境信息。
2)历史曲线查询界面是根据历次巡检时存储到数据库里的数据绘制出2 种形式的报表:1 种是曲线;1 种是表格。2 种形式的报表都可以自定义开始、结束时间进行时间段查询。软件内部集成大数据分析功能,可以针对单独某个巡检数据绘制出当前巡检信息的变化趋势。
3)报警历史信息查询界面可实现历史报警信息与实时报警信息的动态切换,实时报警信息会根据巡检机器人反馈到数据库的报警信息实时显示;历史报警信息则根据数据库中存储的每次报警信息按类别统计,将次数显示在界面上。
系统程序数据处理和控制流程如2。巡检机器人对现场设备采用多参数传感器进行氧气、二氧化碳等环境气体采集、采用可升降摄像云台拍摄着火点、采用热成像仪识别高温区域,实时检测数据返回到UI 界面上,并进行数据处理和分析。当检测设备无异常时,会在UI 界面上正常显示该设备运行时的电压、电流等参数。当紧急火情异常发生后,系统将自动根据设计的实时触发逻辑控制程序转换为紧急处理模式,并将报警信息实时动态显示。

图2 控制流程图Fig.2 Control flow chart
2.3 系统接口
数字孪生系统需要操作、管理的数据规模较小,数据库设计包括当前巡检结果报表、历史数据表等报表管理。与数据库的通讯方式采用UDP+TCP 混合方式,UDP 通讯用于传输巡检机器人速度、位移信息;TCP 通讯方式用于传输视角切换、门开关信息、声音采集信息等等,通讯方式架构图如图3。
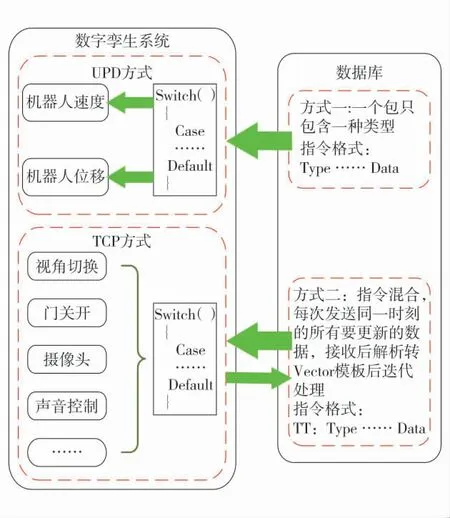
图3 通讯架构图Fig.3 Communication architecture
3 试验验证
在对井下变电所巡检测试试验中,数字孪生系统安装于地面机房的监控平台上,通过制定巡检计划、远程监控巡检机器人完成巡检任务,并将巡检数据和巡检环境可视化显示。管理者可在数字孪生系统主界面通过点击“巡检模式”,确定当前机器人的巡检方式,并可查看当前机器人电量、行走速度、设备状态和巡检任务的数据信息。
相比较于传统的人工巡检,数字孪生系统可以实时显示巡检机器人的动态检测数值,发现异常自动上报,实现巡检全过程的智能化。实时动态检测数据显示界面如图4。

图4 实时动态检测数据显示界面Fig.4 Real time dynamic detection data display
4 结 语
依托于某煤矿井下变电所人工巡检存在的问题,基于智能井下变电所巡检机器人,设计了基于UE4 的井下变电所巡检机器人数字孪生系统。通过对巡检机器人定点巡检、定时巡检以及故障报警预警功能的开发,实现了对矿用巡检仪的智能化管理,已经应用于煤矿现场。运行结果表明,数字孪生系统与巡检机器人相结合可以代替人工巡检,解决了人员劳动强度大,变电所巡检信息不能及时传达等问题。
