基于高分辨定向算法的旋翼无人机被动声探测与 跟踪技术
2021-11-22袁彦
袁 彦
(中国电子科技集团公司第三研究所,北京 100015)
0 引 言
近年来,民用无人机正朝着小型化、轻型化的方向演变。无人机快速发展的同时,也带来诸多安全问题。对旋翼无人机的探测需求日益增大,利用雷达、无线电、光电及声学等多手段综合探测,才能更有效地对旋翼无人机进行探测发现。传统声探测多针对直升机等较大型飞行器,而旋翼无人机具有机动性强、角速度变化快、声音小等特点,传统声探测手段已经不适用。本文针对旋翼无人机的发现和探测,详细介绍了基于高分辨定向算法的被动声探测与跟踪技术。
1 基于高分辨定向算法的旋翼无人机被动声探测技术
以最普遍的民用大疆精灵3作为旋翼无人机的典型代表,电动力多旋翼无人机的主要噪声源为旋翼噪声,可分为旋转噪声和宽带噪声两个部分。多旋翼无人机由于存在多个旋翼声场的相互作用,其频谱既表现出旋翼噪声的线谱和多谐波特性,同时又具有以各线谱为中心频谱展宽的特点[1]。大疆精灵3的噪声信号时频图如图1所示。
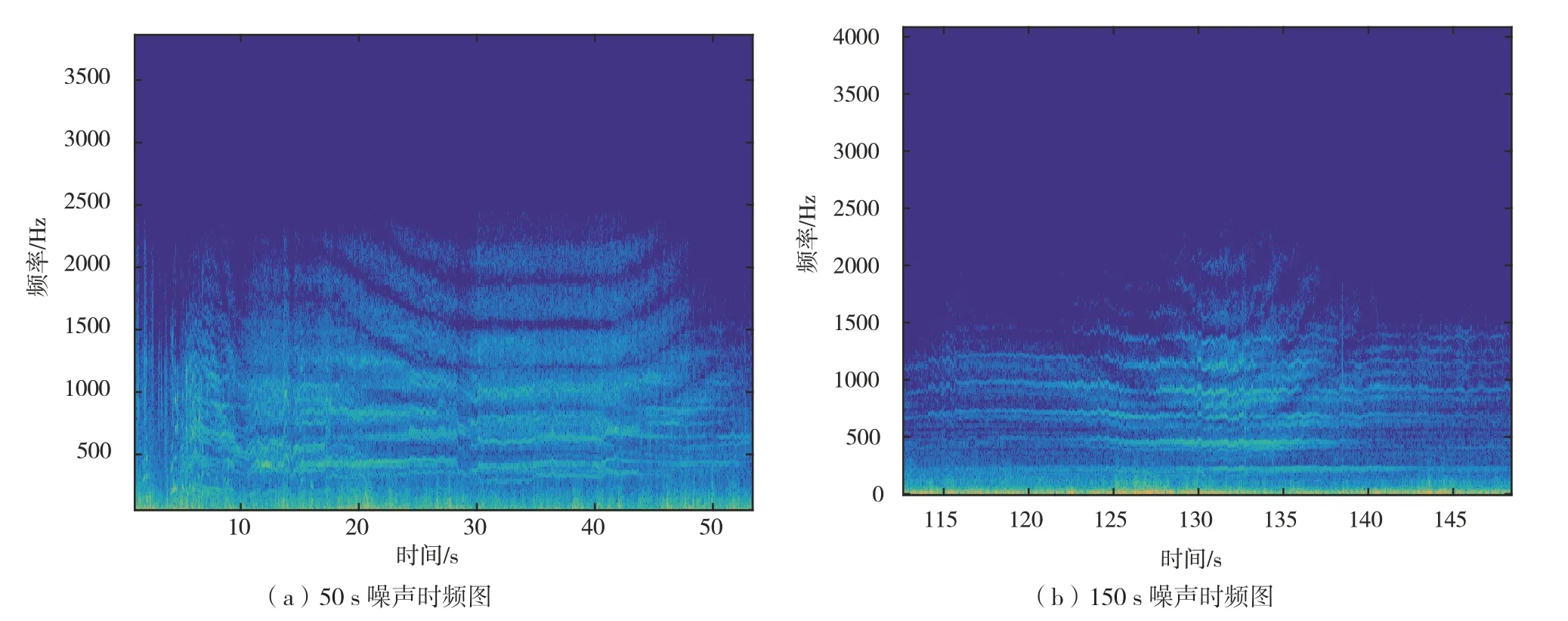
图1 大疆精灵3的噪声时频图
经过声特征频率分析,旋翼无人机的频谱多分布在100~1 000 Hz,设计8 000 Hz的采样率。含有目标噪声的信号经过AD模块采样后得到阵列数字信号,为了适应小目标快速机动的特点,选取 0.5 s作为信号处理周期[2]。下面详细介绍基于窄带的高分辨定向算法解决探测宽频信号的方法步骤。
1.1 声特征频率的选取算法
声特征频率的选取算法由以下步骤实现,如图2所示。
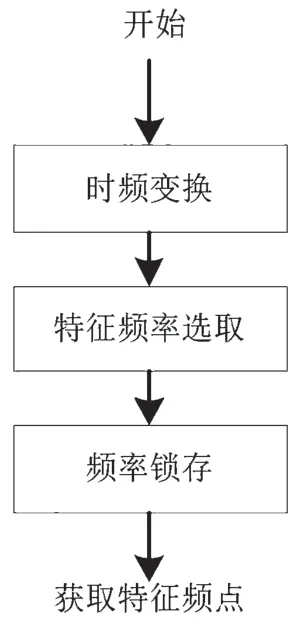
图2 声特征频率的选取流程图
1.1.1 时频变换
为了减少频谱泄露,时域信号加hanning窗。阵列信号进行快速傅里叶(Fast Fourier Transform,FFT)时频变换,多通道频域叠加。

式中:M为阵列通道数,Fs为信号采样率。
1.1.2 特征频率选取
噪声归一化,检测1 000 Hz频率范围内的特征频点。为了提高频率点的准确性、减少干扰频点,将相邻特征频点合并,提高频点置信度。缓存5个处理周期的频率数组,选取频次较多的频率点。
1.2 经典music法
利用信号子空间和噪声子空间的正交性,假设噪声、信号噪声为空间不相关,由阵列的接收的窄带远场信号为X(t)=A(θ)s(t)+N(t),数据的协方差阵进行特征分解为确定信号子空间和噪声子空间空间谱的表达式为:

式中:a(φ)为阵列流型矩阵,uN为噪声子空间,Pmusic(φ)的峰值显示了信号的来波方向。
根据信号参数范围对Pmusic(φ)进行谱峰搜索,找出最大值点对应的角度即为信号入射方向。
2 基于灰色预测模型的航迹跟踪技术
2.1 航迹的建立
航迹的建立采用基于密度的聚类法:在连续秒的方位中,如果在一定误差范围内的方位角连续超过5个探测周期,就建立一条新的航迹。
2.2 数据关联
数据关联使用最近邻法:把当前秒的方位和已经形成的航迹预测值或航迹的最后一点比较,选取最接近差值的方位角度,续在已存在航迹的 末尾[3]。
2.3 航迹预测
2.3.1 灰色预测
对于低空飞行目标航迹点,二阶曲线拟合在有错误点时显得不足,灰色预测需要的数据量较少,可根据实际情况选用适量的数据进行累加生成,选取4~6个数就进行建模测试,通过研究认为GM(1,1)模型符合对空中飞行目标航迹的预测:

3 实验室数据分析和算法仿真
实验室分析旋翼无人机的声信号特点,连续时频图如图3所示,呈现宽谱信号特性,也存在一定的基频和谐频特征,但总体来说特征频点分布较广。传统的直升机线谱探测方法不再适用,改用上述宽谱探测方法。

图3 大疆精灵3无人机时频图
对每一个特征频率点进行经典music定位计算,得到的空间谱上将出现目标的方位信息,其中最大谱峰对应的位置信息即目标在空间的对应方位角和俯仰角。在实验室用MATLAB仿真2个和3个目标的仿真宽带信号,针对每一频率点进行高分辨方位估计,得到的空间谱图如图4所示。从图4可清晰地看到,从空间谱的角度能分辨出2个和3个目标,从而获得目标的方位角度和俯仰角度。

图4 多目标三维空间谱
4 外场试验验证
为了进一步验证实验室结果,选取比较安静开阔的场地,在天气晴朗、风力3级以下的环境下,对大疆精灵3做实时探测试验,能实时发现探测到大疆精灵3并在一定的探测范围内实现航迹跟踪,结果如图5所示。
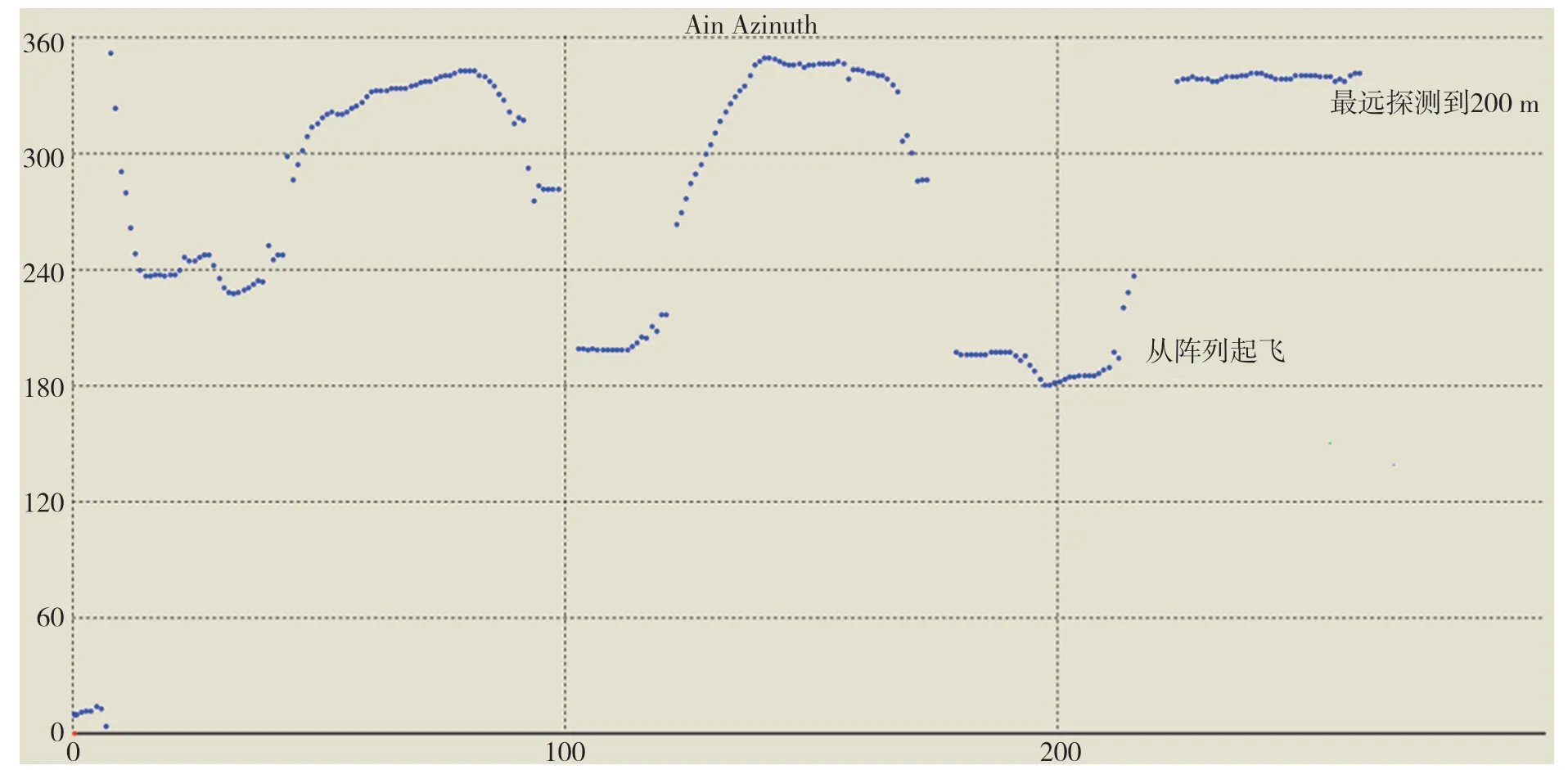
图5 大疆精灵3点迹探测图
5 结 语
在传统的声探测技术基础上,本文提出的针对旋翼无人机的基于高分辨定向算法的被动声探测与跟踪技术,在实验室仿真和外场实飞试验中均取得了满意的效果。下一步可继续在噪声抑制、探测精度及探测距离这几个方面进行不断改进和 提高。