小型光电转台直流无刷电机驱动控制的设计与实现
2021-11-22程道伟
路 新,程道伟,郑 尧
(1.中国电子科技集团公司第三研究所,北京 100015;2.陆航研究所,北京 101121)
0 引 言
航空监视侦查、小型无人机巡检及搜救等应用领域需要小型化甚至微型化的光电转台,以适应载体本身有效载荷小、负载能力有限的场景。在以往光电转台驱动电机选型时,大多选择直流有刷电机作为执行机构。它驱动简单,只需提供可调压直流电源便可以实现驱动控制,但存在换向电刷损耗、摩擦、转子惯量大等缺点,造成同等力矩输出条件下,直流有刷电机的体积、重量要比直流无刷电机大的多,因此小型光电转台的执行机构常选择直流无刷电机。由于无刷电机没有机械换向刷架,需要磁场定向控制才能平滑运行,因此设计了一套适用于旋转半径65 mm小光电转台的基于TMS320F2808的直流无刷电机驱动控制系统,实现了两轴光电转台的速度环、电流环驱动控制。
1 磁场定向控制原理
磁场定向控制的本质是控制电流的幅度和相位,使转子产生的磁场和转子的磁场正交,以产生最大的扭矩,是控制无刷电机平滑运动的关键策略[1-3]。因此高精度无刷电机控制必须包含电流环。
常用的磁场定向控制方法有id=0控制、最大电流转矩比控制、单位功率因数控制以及恒磁链控制。使用最多的是id=0控制,该方法是将电机直轴电流id保持为0,交轴电流iq始终与转子磁场保持90°夹角,电机的转矩此时仅与交轴电流成正比[4-5]。该方法控制结构简单,易于实现,因此得到广泛使用。id=0控制框图如图1所示。

图1 id=0控制框图
在脉宽调制(Pulse Width Modulation,PWM)方式上,空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)调制比正弦脉宽调制(Sinusoidal Pulse Width Modulation,SPWM)调制电源利用率高,但光电转台等对低速控制要求较高的场合中,SPWM调制比SVPWM调制更合适。图1中,PARK、CLARK逆变换的输出直接调制PWM即可得到SPWM,通过电机驱动器得到三相相位相差120°的正弦调制电压控制无刷电机运转。根据基尔霍夫电流定律,无刷电机三相电流之和为0,即iu+iv+iw=0,所以在工程实际中可以省略一个电流传感器,只检测其中两相电流。
图1框图中的CLARK变换公式为(以电流 为例):
CLARK逆变换公式由CLARK变换公式取逆运算得到。
PARK变换公式为:
式中:θe为转子电角度。
PARK逆变换公式由PARK变换公式取逆运算得到。
2 设计需求
该驱动控制系统包含方位、俯仰驱动控制板各一块,放置在空间受限的转台左、右侧耳处,分别控制方位、俯仰轴无刷电机,实现两轴转台运动控制。电路板外形及电路均相同,板型大小为50 mm× 80 mm。
电路应实现3路RS-422串口,用于和上位机、MEMS陀螺及板间数据通信;1路差分SPI,用以接收16位绝对编码器的角度值;能驱动直流24 V、母线电流最大2 A的直流无刷电机实现1 ms速度环、100 μs电流环控制,标记转台绝对零位且断电 不丢失。
3 硬件详细设计
由于板型尺寸较小,要实现的功能多,且要保证实时运算的要求,采用多层板、小封装的设计满足方案要求。构建以TI的TMS320F2808为运算控制核心的硬件电路,框图如图2所示。

图2 直流无刷电机驱动控制板硬件框图
3.1 电源转换电路设计
电路板需要12 V 1 A、5 V 1 A、3.3 V 1 A、 1.8 V 0.6 A四种电源。选择能产生2.5 A电流的开关电源芯片TPS54260产生12 V电压,供给电机驱动芯片,该芯片尺寸为3 mm×3 mm,电路图如图3所示。5 V电源也采用相同芯片设计,只是将电路图中的R5换成52.5K,即可产生5 V电压。3.3 V和1.8 V电源供给TMS320F2808芯片,选择使用线性集成电源芯片TPS767D301产生。
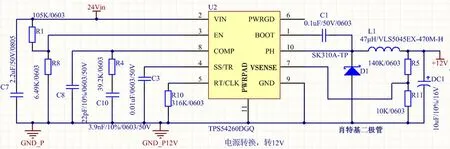
图3 TPS54260产生12 V电源电路
3.2 RS-422串口设计
TMS320F2808自带两路UATR串口,还需设计一路外扩串口,接收MEMS陀螺19字节波特率921.6 kb·s-1的串口数据。为防止串口数据拥塞,减轻控制芯片读取数据的压力,选择EXAR公司的具有64 Byte FIFO的SPI接口XR20M1172UART扩展芯片进行设计,如图4所示。该芯片具有接收超时中断的能力,在两帧陀螺数据之间向控制芯片发送中断信号,完成读取一帧陀螺数据任务。
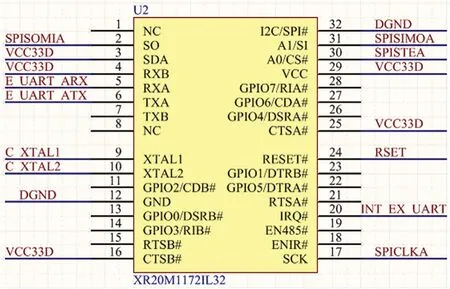
图4 XR20M1172扩展串口设计
RS-422接口芯片选择TI的自带ESD保护的THVD1451,如图5所示,其最大收发速率为 50 Mb·s-1,因此在5 Mb·s-1差分SPI接口设计中也使用该型芯片。
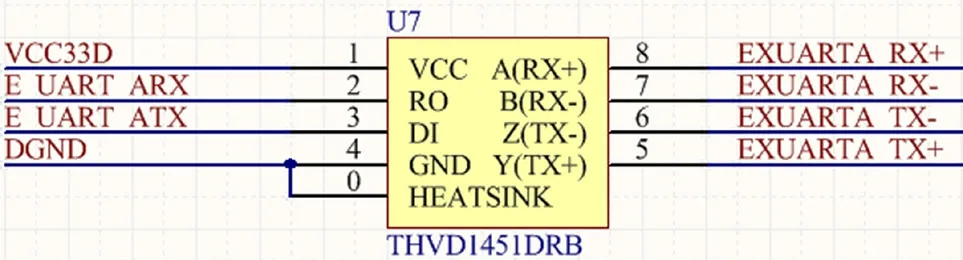
图5 THVD1451电路设计
3.3 驱动电路设计
电机最大功率为48 W(24 V,2 A),电机相电阻为1.1 Ω,则等效的相电流为3.8 A。因此要求电机驱动芯片每相电流不小于4 A。选择使用TI的三相无刷电机驱动芯片DRV8332,它具有每相8 A的电流驱动能力,完全满足设计需要。为保证片上设计安全性,在芯片8脚与9脚之间要加入1 Ω电阻R10,电路设计如图6所示。

图6 最佳缝合线寻找结果
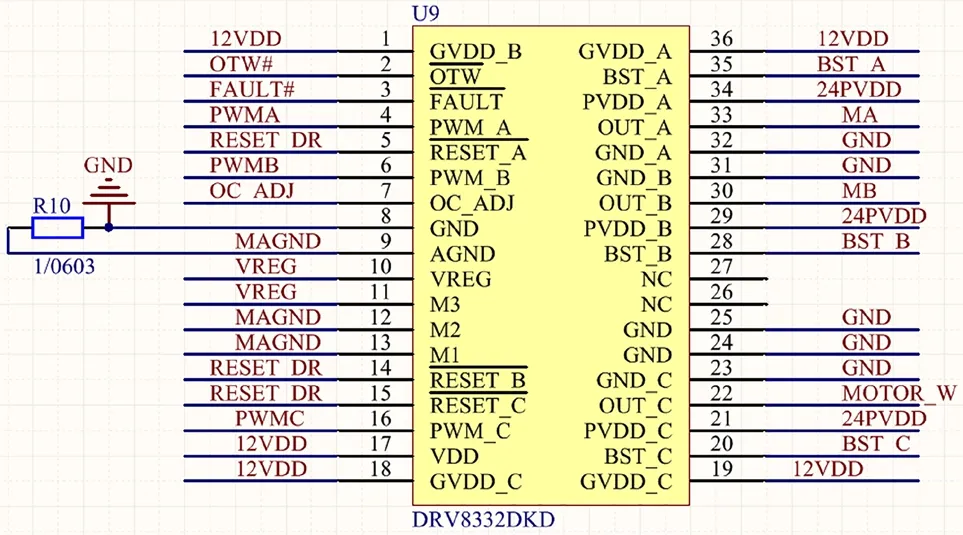
图6 DRV8332电机驱动电路设计
3.4 电流感应及模拟调理电路设计
电流感应芯片使用ALLEGRO公司的ACS-712-05芯片,它具有±5 A量程,灵敏度185 mv/A。 因电流环控制需采集U、V两相电流,所以需要两片ACS712完成电流感应。当无电流流过时,ACS712输出2.5 V电压,而F2808的AD接口的模拟输入范围为0~3 V,因此需要进行放大调理后使用。由AD8629组成的放大调理电路对两路模拟电压完成1.5倍放大,当ACS712输出2.5 V时,调理后信号变为1.5 V。电流感应及模拟调理电路如图7所示。

图7 鬼影优化后对比
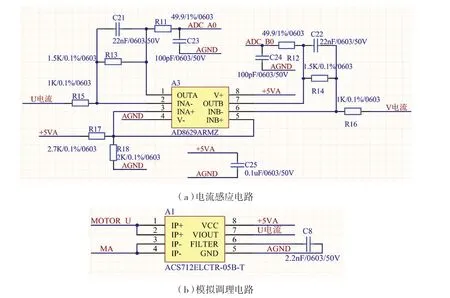
图7 电流感应及模拟调理电路设计
4 软件设计
因需要在每个PWM周期内完成1次电流环的运算,所以PWM的周期也为100 μs。在F2808中设置EPwmxRegs.TBCTL.bit.CTRMODE= TB_COUNT_UPDOWN,即PWM处于增加计数模式,当PWM计数器的值等于周期寄存器值时,触发片上AD中断采样,完成磁场定向运算,控制PWM比较寄存器,输出3路SPWM信号。
F2808芯片属于定点处理器,而磁场定向运算需要大量正余弦运算,为减少运算时间,需将[0°,90°]的正弦值列表存储在程序中,利用正余弦数学转换公式完成[0°,360°)正余弦值的查表运算。本文中设置一个正弦周期采样512点,则在程序中只要存储129个正弦值即可,设SIN_MAX值为16 384。电流环的输出结果要对SIN_MAX进行归一化,实现正余弦运算。电流环控制程序流程如 图8所示。
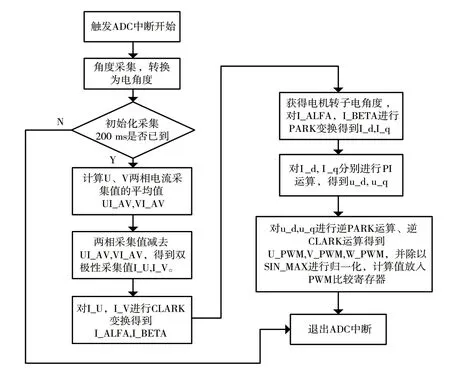
图8 电流环控制程序流程图
1 ms速度环控制在定时器中断中完成,通过外扩串口接收到MEMS陀螺数据,经过PII校正后,将速度环变为二型控制系统,增大系统力矩刚度,其校正结果直接赋值给电流环命令输入I_q,实现速度控制。
5 试验验证
该控制系统设计完成后,板型尺寸、功能均满足需求,并在光电转台调试过程中优化各控制环节参数。电流环使用正弦表的方式进行正余弦运算的时间约在20 μs,满足实时性要求,而直接使用正余弦运算的时间约在130 μs。电流环调试结果如图9所示。输入阶跃指令为±1 A,对应AD采集值为341码,可以看出,两轴的电流均可在1 ms内达到指令值,无超调。速度环指令给予每秒±10°的阶跃,两轴速度响应150 ms以内达到稳定值,单方向超调21.9%,满足使用要求。速度环调试结果如图10所示。
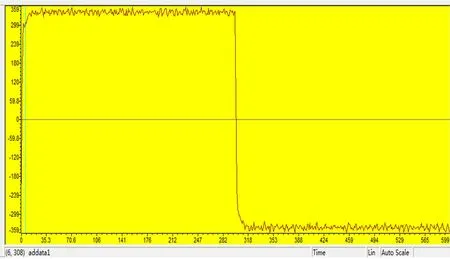
图9 电流环调试结果

图10 速度环调试结果
6 结 语
本文设计了一套适用于小光电转台的基于TMS320F2808直流无刷电机驱动控制系统,实现了两轴光电转台的速度环、电流环驱动控制。经试验验证,系统各功能、性能均满足设计需求,为其他光电转台无刷电机驱动控制系统的设计开发提供了工程参考。