具有时变时滞的多智能体系统的加权平均一致性
2021-11-19张铁成刘云芬
张铁成,刘云芬
(湖北师范大学 数学与统计学院,湖北 黄石 435002)
0 引言
近年来,多智能体网络的分布式协调控制应用十分广泛,而一致性是协调控制中的基本问题,具有重要的理论意义和实际应用价值。所谓一致性,就是多智能体系统在通过协调控制后,最终各个多智能体的状态取得一致或相同。
关于多智能体系统的一致性问题已有一些研究成果。Olfati-Saber[1]提出了分散协调控制规则,以使多智能体无向网络取得平均一致性,同时考虑了网络存在通信时间延迟的情形。Lin等[2]采用LMI的方法,讨论了时变时滞网络的平均一致性问题。杨继永等[3]利用马尔可夫收敛准则探讨了多智能体系统平均一致性问题。宋莉等[4]利用模型变换方法研究了具有不确定拓扑及联合连通图的多智能体网络的平均一致性。康玉婷等[5]开展了具有随机切换拓扑结构的多智能体系统平均一致性的研究。孙一杰等[6]利用辅助变量方法解决了多智能体网络在任意强连通下平均一致性问题。Meng等[7]基于无向图研究了一阶多智能体系统在固定和切换拓扑下的周期事件触发平均一致性问题。Wang等[8]采用事件触发控制的方法讨论了存在常通信时滞的多智能体系统的平均一致性问题。李富强[9]研究了事件触发机制下具有固定和切换拓扑结构的多智能体网络的平均一致性问题。韩世涛等[10]采用周期采样和事件控制的方法对多智能体系统的事件触发平均一致性问题进行了时滞鲁棒性分析。还有一些其他类似的研究成果[11~15]。
目前,大多数多智能体网络一致性的成果仅限于系统收敛值为初始值的平均值(平均一致性)的情形,本文提出一种新的控制协议,能够使智能体的状态最终能达到任意的加权平均值(加权平均一致性),并且系统是在切换拓扑结构并伴随着时变时滞的情形下实现的。同时,考虑到在系统稳定性分析中代数方法的复杂性,本文引入正交变换,将奇异系统矩阵转化为非奇异系统矩阵,使系统收敛条件化简为LMI的可解性问题。
1 预备知识
1.1 代数图论
设G(V,E,A)表示顶点集为V,边集为E,权重邻接矩阵为A的权重有向图。图的每个结点表为Vi∈V或i∈I={1,2,…,n};图的每条边表示为e=(νi,νj);权重邻接矩阵A=[aij],aij>0,且对任意的i∈I设aij=0.

L=L(G)=D-A.由定义可知Laplacian矩阵每行之和为零,因此Laplacian矩阵总有属于零特征值的右特征向量ω1=1n=(1,1,…,1)T.
定义1[1](强连通图) 如果图G的任意两个顶点都存在一条路径,则称图G为强连通图。
定义2[1](平衡图) 如果图G的每个顶点的入度等于出度,则称图G为平衡图。
引理1[1]设G(V,E,A)为强连通图,则图G的Laplacian矩阵L满足下列三条:
1)秩(L)=n-1;
2)矩阵L的一个特征值为0,相应的特征向量为1n,即L1n=0;
3)矩阵L除去一个为0的特征值以外的其他n-1特征值均有正实部。
1.2 一致性问题
设χi为第i智能体的状态,每个多智能体的动态模型为:
(1)


本文给出如下的控制协议:

(2)
结合(1),多智能体系统的动态模型写成矩阵的形式为

(3)
设映射st∶[0,+∞)→IΓ={1,2,…,N}(N∈+,指的是所有可能的有向图的个数)是切换信号,它决定了网络的拓扑结构。则在切换拓扑结构的网络中(3)变为:

(4)

(5)
引理3[2]设矩阵
则以下三个命题成立:

ii)存在正交矩阵F,使得下列等式成立
iii)正交矩阵F是矩阵Y的特征向量。对任何平衡矩阵J∈Rn×n,有
2 主要结论


(6)
设FTΔ(t)=「δ(t),0⎤T,于是(6)可以写为:

(7)

(8)
证明 我们定义如下的Lyapunov-Krasovskii函数:
沿着(7)的轨线,我们有:

显然,


由引理2,可得(10)等价为
联立(11),再利用引理2,即可得(8)。于是证明了当(8)成立时,系统(1)能取得全局渐进加权平均一致性。
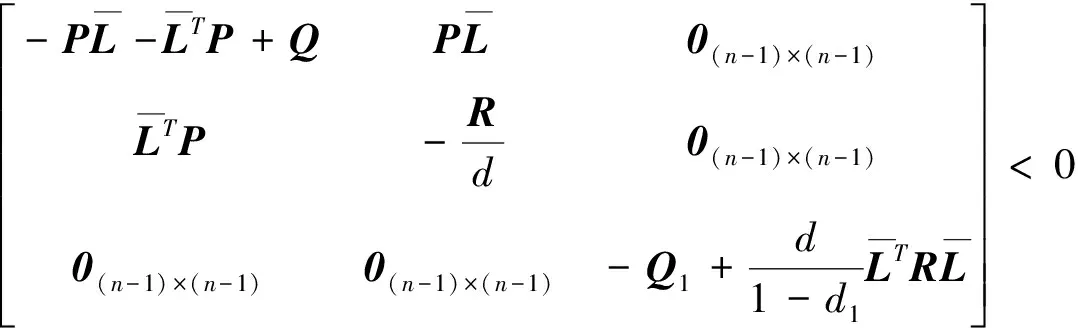
定理2 考虑(5)条件下具有切换拓扑结构的有向图G,G的n个结点的动态模型为(1),且G为强连通的平衡图,则分散控制器(2)能取得全局渐进加权平均一致性,如果K∈IΓ,存在适当维数的对称正定矩阵P,Q,R∈R(n-1)×(n-1)使得下面条件成立:
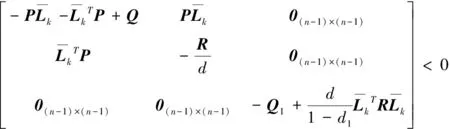
(12)

注:定理2的证明类似定理1的证明,这里省去。
3 例子和仿真
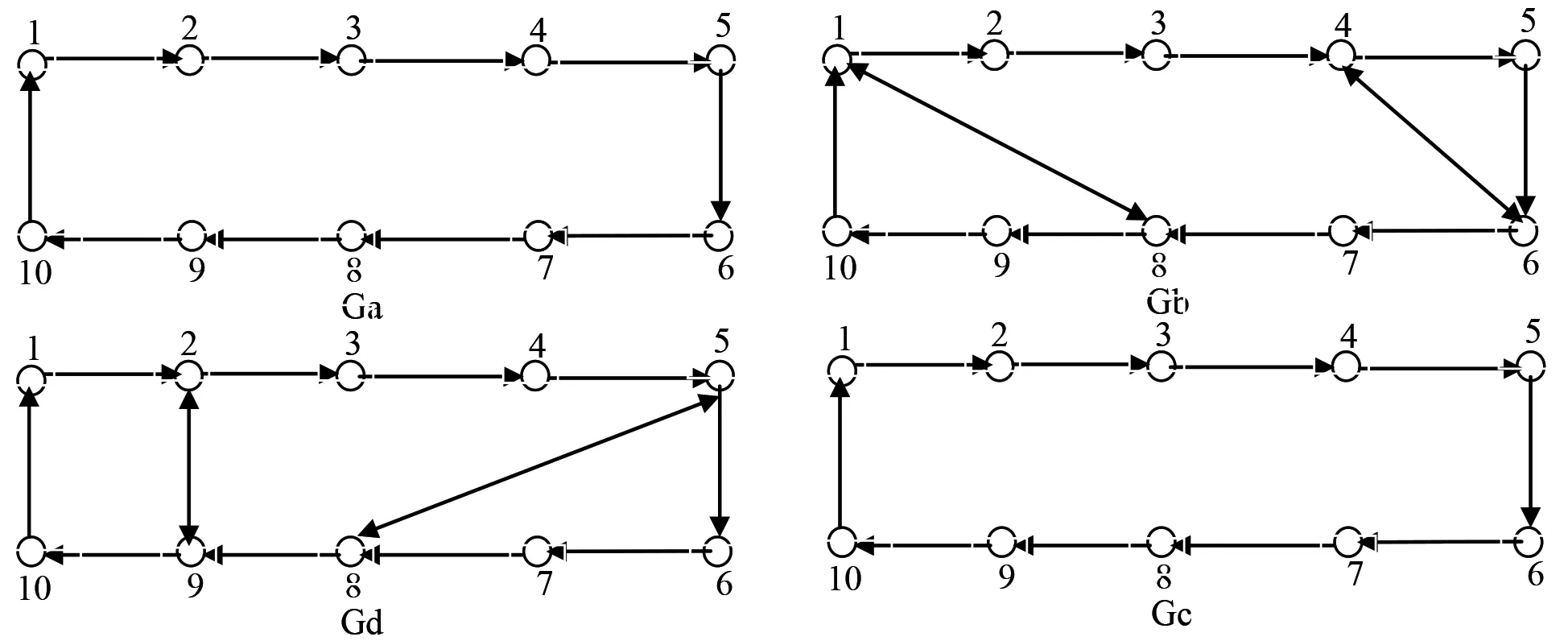
图1 四个强连通平衡图的例子
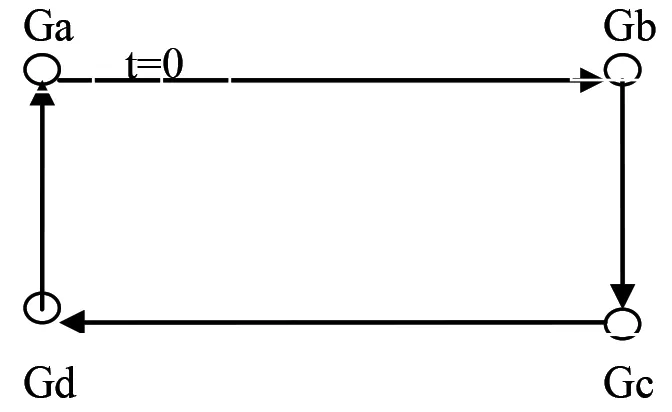
图2 具有时变时滞的切换拓扑示意图
4 结论
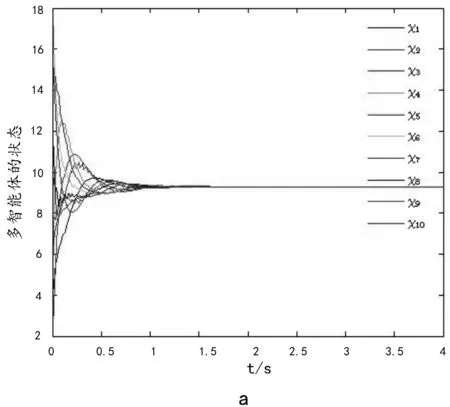
本文讨论了有向时变时滞多智能体网络的加权平均一致性问题。采用状态分解方法对系统进行转化,利用LMI给出多智能体网络取得加权平均一致性的充分条件。最后通过例子和仿真验证了理论结果的正确性。
本文创新点:基于加权平均一致性,在有向切换拓扑和时变时滞多智能体网络中,提出了一种新的控制协议,提高了控制系统的适应性和灵活性;运用正交变换把系统变为降维的等价系统;利用LMI的处理方法给出了系统取得渐进加权平均一致性收敛的充分条件。
