基于神经网络的复飞风险决策技术研究
2021-11-19苏晓东朱齐丹
李 晖,王 雅,苏晓东,朱齐丹
(1.哈尔滨商业大学计算机与信息工程学院,黑龙江省 哈尔滨 150028;2.哈尔滨工程大学自动化学院,黑龙江省 哈尔滨 150001)
1 引言
由于复飞问题的重要性,决策形势的严峻性,从舰机适配安全性角度考虑,复飞决策技术相比于引导着舰技术重要性毫不逊色,深入分析舰载机复飞机动过程,精确建立复飞运动模型以及合理制定复飞决策是有着理论与实际意义的[1-3]。
目前可见的复飞决策研究多是在明确舰载机初始飞行状态的基础上,依据复飞航迹曲线簇建立复飞风险区域,作为划分有无撞舰风险的定性判别依据,不能定量地,实时地针对任意初始复飞状态进行决策,对着舰指挥官(Landing Signal Officer,LSO)判断舰载机当前复飞风险和未来风险变化趋势的事实刻画较为粗糙。
为弥补定性复飞决策技术的局限性,本文在分析复飞机动过程,建立高度损失较小的军用推力与升降舵综合控制复飞运动模型的基础上,针对传统复飞决策方法定量性的不足,提出基于神经网络的复飞风险决策方法,实时计算当前飞行状态下的舰载机复飞风险,比较不同输入变量的对复飞剩余距离的影响,通过实例分析证明方法的准确性。
2 复飞运动模型
传统的舰载机军用推力复飞运动模型建立的基础是美国海军航空发展中心Robert B.Johnstone教授于1968年提出的经典安全复飞准则,从舰尾净高、驾驶员指令反应延迟和复飞操纵手段三个角度对复飞安全提出要求[4,,5],模型结构如图1所示。

图1 军用推力复飞系统

(1)
军用推力复飞技术应用广泛,但由于单一油门操纵的推力限制,复飞过程中速度增大的同时迎角减小,较大的高度损失不仅增加了复飞风险,同时也给驾驶员造成心理压力,这对于保证舰载机着舰安全是非常不利的。
现代高机动性能飞机在控制能力提升的条件下,以降低复飞高度损失为出发点,在原军用推力操控的基础上,增加升降舵控制,组成军用推力与升降舵综合控制系统:结合驾驶员油门操控和纵向驾驶杆控制,推力增加的同时维持合适迎角,以此来减少高度损失[7-12]。
近年来广泛应用的是利用模糊控制保持迎角恒定的升降舵操纵方式[13],建立的军用推力与升降舵综合控制复飞系统结构如图2所示。

图2 军用推力与升降舵综合控制复飞系统
如图3所示为两种复飞操作方式得到的包线对比图。综合操控复飞模型风险区域显著减小,较单一军用推力操控区域缩小约3倍,多通道协同作用的操控方法可以在允许的条件下减少不必要的复飞,不仅提高了风险评估的准确性,而且降低了驾驶员飞行压力,这种双通道综合控制模型符合实际复飞操作情况,可以作为后续复飞决策技术的研究对象。
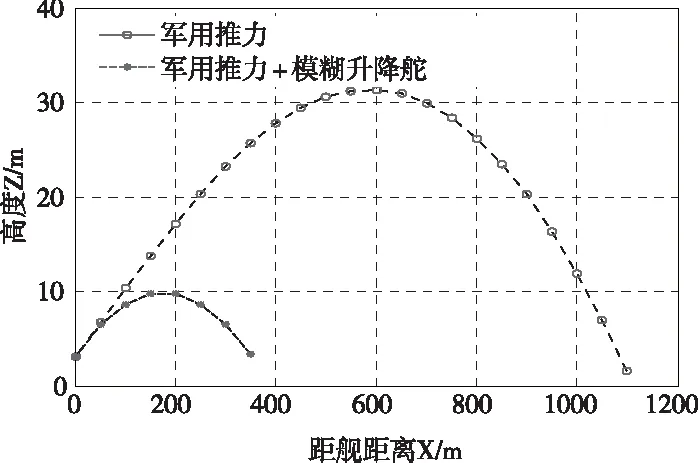
图3 不同操纵方式复飞包线
3 复飞状态风险分析
舰载机复飞过程中,驾驶员面临的最主要风险——“复飞撞舰风险”,是指在复飞过程的近舰阶段舰载机尾钩或其它部位撞击航母甲板尾端的危险情况。由于进舰速度较快,驾驶员来不及做出反应,仅在舰尾附近对复飞风险进行评估是不实用的,如果能够在进舰全过程中实时评估复飞风险,那么就可以依据风险量值决策复飞,但由于舰载机飞行状况的复杂性和未来状态的不确定性,风险评价难度很大,如图4所示为舰载机撞舰过程示意图[14-16]。
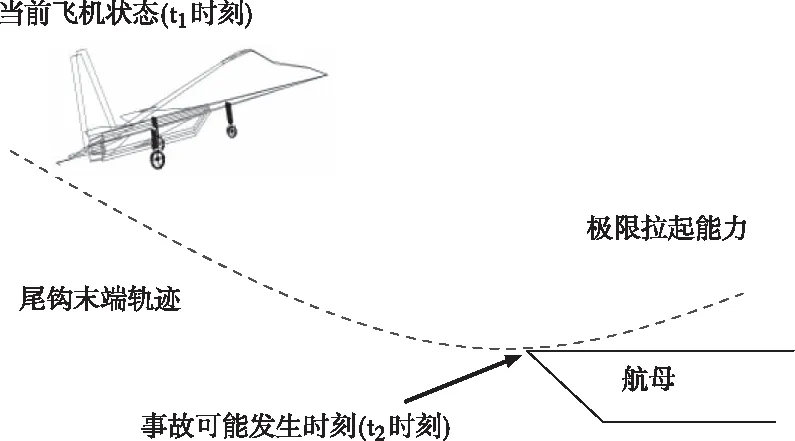
图4 军用推力与升降舵综合控制复飞系统
图4中,t1时刻舰载机距离航母较远,但此时采取复飞机动就已经处于“尾钩撞舰”的高风险状态,因为即使沿图中的标准复飞航迹拉起,仍会在复飞过程的t2时刻发生撞舰事故,但仅根据t1时刻飞行状态预测复飞风险是比较困难的,因为t2时刻事故发生的原因,可能是t1时刻位置过低,飞行迎角过小,俯仰角波动速度较大或当前风速和流场引起机体下沉等,只有将所有影响因素一一列举,并依据它们建立高维空间概率分布函数,才可能准确量化t1时刻风险。因此,本文欲建立的复飞风险评价函数应为作用于整个下滑过程中,关于舰载机各飞行状态量和环境量的高维空间连续函数。所谓t1时刻“撞舰风险”,即为t2时刻实际撞舰事故发生的概率
(2)

步骤1:选取tk时刻舰载机飞行状态(位置、姿态)和环境信息作为初始状态量,依据军用推力与升降舵综合控制复飞模型绘制tk时刻作为复飞起始点的标准复飞航迹;


(3)
其中ΓLowRisk、ΓHighRisk和ΓTransRisk分别为“复飞低风险区”、“复飞高风险区”和“复飞过渡风险区”。
4 基于神经网络的复飞风险评测
4.1 网络结构设计

(4)
理论研究表明具有单隐层结构的BP系统可以满足任意多维映射的需要,且对于n个输入单元和q个输出单元的3层网络,隐层节点数目可以如式(5)确定[14]。
(5)
式中a为0-10常数,结合实际情况进行试探性选择,从计算精度和效率着手,最终确定N=7。
4.2 模型训练与测试
本文建立拓扑结构为4-7-1型的BP神经网络模型,如图5所示,其中隐层和输出层分别选用双曲正切S型激活函数和对数S型激活函数,通过离线仿真得到飞行状态数据,归一化后分为训练数据和测试数据两类,模型经600次训练收敛,误差为0.00014,精度较高。

图5 复飞风险评测模型

表1 神经网络输出
4.3 非线性变换


图6 撞舰风险与复飞剩余距离关系曲线

(6)
(7)
综上所述,本文建立的复飞状态风险评价函数综合表达形式为:
(8)
4.4 过渡复飞风险区域


图7 ΓTransRisk内风险区域



5 复飞风险评测仿真实例
为验证本文提出的基于神经网络复飞风险评测方法的准确性,针对不同输入变量进行仿真,分析其对复飞风险的影响作用。
5.1 飞行速度参量

图8 复飞剩余距离三维曲面

图9 撞舰风险三维曲面

5.2 干扰下沉率参量


图10 复飞剩余距离三维曲面
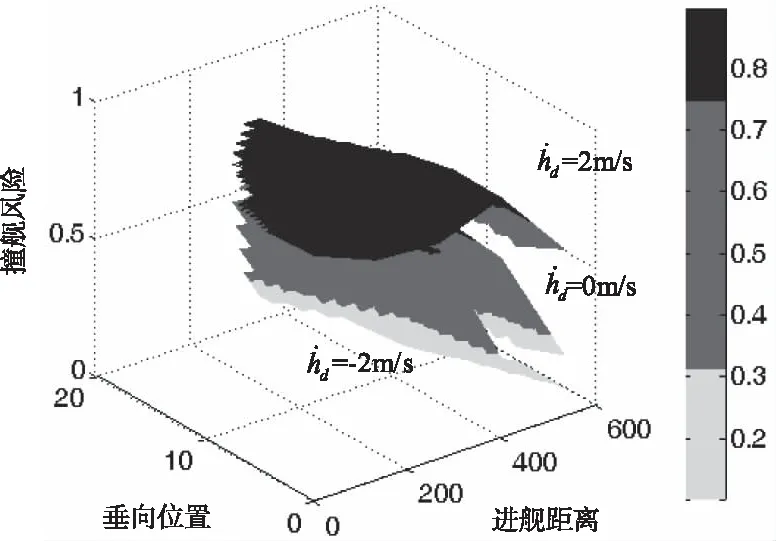
图11 撞舰风险三维曲面

6 结论
本文在对舰载机复飞机动过程分析的基础上,建立了军用推力与升降舵综合控制复飞运动模型,仿真结果表明多通道协同作用的操控方法降低了复飞过程中的高度损失和驾驶员心理压力;针对传统复飞决策技术量化性和实时性的不足,设计基于神经网络的复飞风险评测方法,通过建立状态风险建模区域,实时计算舰载机着舰过程的复飞风险,仿真分析不同输入变量对复飞风险的影响,验证本文提出的风险评测方法的准确性,对兼顾着舰安全和复飞安全提供了基础理论支持。
