H-ADCP水深定位控制系统的研制与应用
2021-11-18吴德波陈涛
吴德波 陈涛
摘要:H-ADCP是流量在线监测的先进手段,是水文测验现代化的重要方式之一。水利枢纽下的水文站测验断面水位变动频繁且幅度较大,准确快速调整仪器所处水深位置是確保H-ADCP测验精度的关键,也是H-ADCP投产运用的难题之一。本文给出了一种H-ADCP水深定位控制系统,实现了所处水深位置的自动准确调整。在黄河干流小川水文站等应用情况表明,该系统性能可靠,保证了H-ADCP流量测验成果的精度。
关键词:H-ADCP;水深定位;控制系统;PLC
Abstract:Using H-ADCP for on-line flow monitoring is one of the important ways of hydrological modernization. The water level of the test section of the hydrological station under the water control project changes frequently and greatly. Accurate and rapid adjustment of the water depth position of the instrument is the key to ensure the accuracy of the H-ADCP test,and it is also one of the difficult problems in the operation of the H-ADCP. This paper presents a H-ADCP water depth positioning control system,which realizes the automatic and accurate adjustment of the water depth position.The application in Xiaochuan hydrological station of the Yellow River shows that the system has reliable performance and ensures the accuracy of H-ADCP flow measurement results.
Key words:H-ADCP;depth positioning;control system;PLC
0 引言
近年来,随着国家对水利的重视,大量的水利水电工程不断兴建,受频繁调蓄水影响,许多水文站,比如黄河流域享堂、小川、青铜峡、小浪底水文站等,测验断面水沙情势和测验环境受到了巨大影响,水位陡涨、陡落,且变幅大(有的测站断面在1h内水位变幅可达数米),流量测次布置困难,有时来水时间也无法完成单次流量测验。国家全面推进最严格的水资源管理制度,对水文监测能力提出了越来越高的要求。随着水文测报能力的提升,ADCP已经在黄河水文系统得到了较为广泛的运用,但对于上述水位涨落频繁且变幅大的水文站,常用的走航式ADCP和缆道式ADCP都存在明显不足,不能完全满足流量精度控制要求。[1]
H-ADCP作为在水平方向上进行多普勒测量的在线流量测验设备,通过控制和监测测流断面水平方向层流速分布,在高、中、低水位选取代表性流速后加以率定,从而实现在线获取高精度流量信息,对于很难测验的低流速和非恒定流,也能较好保证测验精度。流量测验过程可远程操控或自动运行,受天气状况影响小,数据精度高,适用性好。[2]H-ADCP测量精度主要受仪器整体水平状态、测量盲区设置和所处水深位置精度影响。通过调试仪器纵摇角度和横摇角度,可以较好地控制整体水平状态,盲区也可通过实测精准设置,水深定位控制成为影响H-ADCP测量精度的重要因素。因此,探索研制自动水深定位控制系统,对于H-ADCP的投产运用意义重大。
1 H-ADCP的工作原理
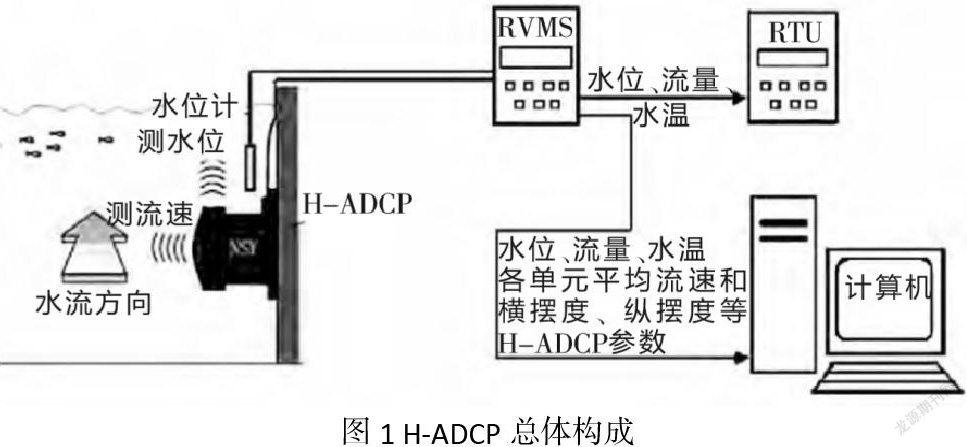
H-ADCP由多普勒流速测量传感器探头、雷达水位计、智能遥测终端设备RTU、电源和信号防雷装置、供电装置、数据传输系统(一般选用GPRS远传系统)、数据处理终端等组成(总体构成见图1)。
H-ADCP多普勒流速测量传感器探头中的超声波测速换能器不断水平发射某一特定频率的超声波(发射方向与水流方向尽量成直角),再通过RTU计算接收到的回波信号的多普勒频移来分析计算流速。在工作中,可同时测取最多128个位置的点流速,通过这些分布在不同水平面的点流速,可以估算得出断面平均流速。与此同时,用传统流速仪法或走航式ADCP等方式测量同一断面的断面平均流速。达到一定的数据量后,就可以将两种方式获取的平均流速建立数学模型,计算断面流速。再用水位数据和大断面数据计算面积,从而算出瞬时流量。上述监测数据,通过传输系统实时传送到数据处理终端,经统计、分析后支持查询、保存和打印,[3]也可以支持水情软件的自动采集,从而实现自动推流和报汛。
2 水深定位控制系统的原理
2.1 研制思路和方案确定
我们选取美国TRDI生产的CM300规格的H-ADCP,其流速分辨率为0.001m/s,精度为±0.5%±0.2cm/s。为取得最佳流速代表性,保证流量测验成果质量,H-ADCP应始终处于0.5H水深的位置。在水位涨落频繁、变幅较大的情况下,保证H-ADCP始终处于相对水深的固定位置,需要及时获取准确的水深数据,能够准确定位,并具有很高的灵活性。
水深数据可通过实时水位在大断面图上查询获取。实时水位可以采用H-ADCP的水位数据,也可以借用水文测站的水位观测数据。H-ADCP内置有高精度的声学水位计和压力水位计,主要是为了在测速的同时计算流量和累计水量。水文测站的水位观测数据来自基本断面,一般通过雷达水位计观测获取,准确性更高,建议优先采用水文测站的水位数据。
利用测站雷达水位计实时监测水位,通过PLC(可编程逻辑控制器)接收水位信息并计算水深,根据水深计算0.5H水深的位置,并通过PLC自动控制水平ADCP的升降,使H-ADCP始終处于0.5H水深的位置,以保证H-ADCP的流量测验精度。
2.2 系统组成
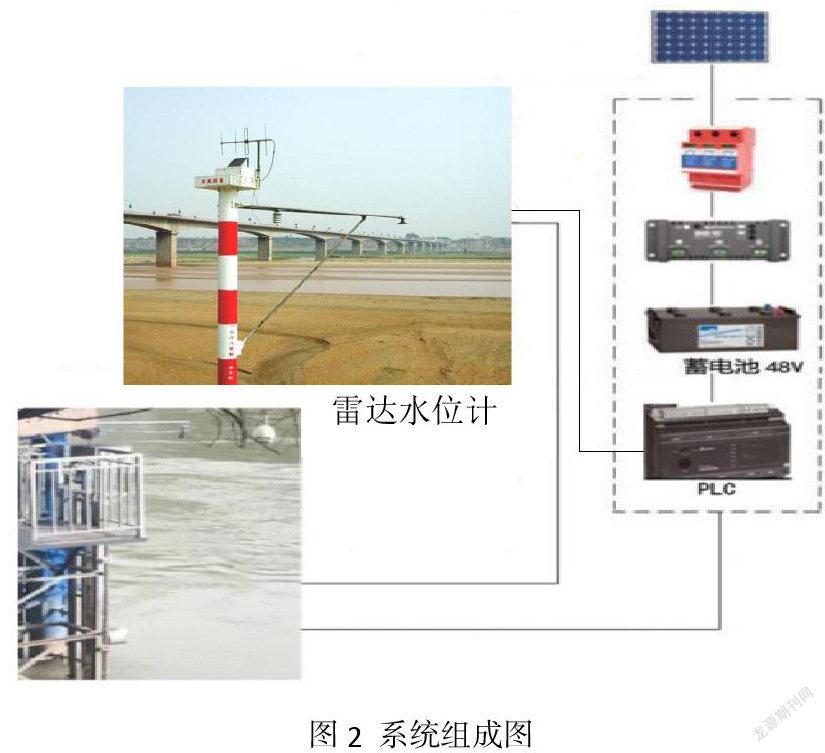
H-ADCP水深定位系统主要由雷达水位计、PLC、升降系统(包括滑道、电机、减速器、卷扬机)、供电系统(一般选用太阳能发电,包括太阳能板、充电控制器及蓄电池)、避雷系统等五个部分组成。(系统组成见图2)
雷达水位计负责监测实时水位。可直接使用测站原有雷达水位计的水位数据。
PLC将计算机编程、通信协议融合到了自动控制的过程中,可以方便地对运行过程进行编程,可靠性好、抗干扰能力强,具有完善的自诊断功能和网络功能,能及时诊断出控制系统的软硬件故障[4],可以实现远程控制、进行 PLC 内部通讯以及与上位机进行通讯,是现在应用十分普遍的自动控制装置。PLC自动控制装置一般由CPU、编程模块、通信模块、电源模块、输入输出模块、存储模块等组成。[5]在水深自动控制系统中,PLC是“大脑”,负责接收雷达水位计的水位信息,并计算0.5H水深位置的高程,对H-ADCP的位置和速度信号进行采样、处理及与上机位的通信。由于本系统的控制功能较为单一,主要是H-ADCP的上升、下降和制动,输入输出的点数少,性能要求以简单、可靠为主,经比对选择,采用CPU 222型西门子S7-200编程器。该型PLC集成数字量输入8路、输出6路,4个独立的30kHz高速计数器,2路独立的20kHz高速脉冲输出,内存6K,1个RS485通讯/编程口,具有PPI通讯协议、MPI通讯协议和自由方式通讯能力,非常适合于本系统这种小点数控制。
升降系统(滑道、卷扬机、电机和减速器)负责控制H-ADCP升降和制动。滑道采用不锈钢材质,根据现场情况定制。安装有H-ADCP的行车安装在滑道上,根据测验断面情况对H-ADCP仪器的纵摇、横摇调整到位。卷扬机、电机和减速器共同实现H-ADCP在水下的制动和稳定,并有效防止水流及杂物冲击可能导致的振动、位移。供电系统负责为系统运行提供电源。
2.3 工作流程
本系统的升降控制由PLC完成。在前期,需要先将雷达水位计与PLC的通信模块通道进行定义,设置好量程。西门子S7-200可编程序控制器可以使用西门子公司免费提供的编程软件编程,目前常用的版本是支持Win7的 Step7 Microwin4.0 Sp9。
在工作中,雷达水位计监测断面水位变化,并将水位数据传输到PLC。常用雷达水位计每6s采集一次水位数据。可视断面水位变化情况,按水位变幅或时间间隔设置数据传输频次。接收到水位数据信号后,PLC控制系统先根据编程指令扫描,并结合系统运行状态进行分析计算,并将执行程序分析计算结果发送到控制主机。控制主机接收到运算结果后,会发送升降系统的具体操控指令信号。由此,PLC完成对升降控制系统的一次调整控制。[6]升降系统按照指令启动电机,电机带动卷扬机进行加速、匀速、减速,将H-ADCP调整到目标位置。
由于系统工作环境差,为保障仪器设备安全,建议采用电子限位和机械限位装置进行双行程限位。在含沙量大的测验河道,应关注断面冲淤变化情况,根据河底高程变化及时调整电子限位,并视情况调整机械限位装置。
H-ADCP安装运用后,应及时分析H-ADCP位置起调的水位变幅对流量测验精度的影响,合理确定并调整H-ADCP位置的起调标准。如果设置值过小,水位发生很小的变化,H-ADCP就会调整所处位置,调整过于频繁,不但影响仪器使用寿命,也会影响单次流量测验精度。
3 系统的应用
截至目前,本系统已在黄河小川、青铜峡等水文站安装应用,系统整体运行稳定。现以小川水文站为例阐述其应用的具体情况。
小川水文站位于甘肃省永靖县刘家峡镇川西路69号,为大河重要控制站,距离刘家峡水电站0.6km,水位变幅很大,常规水文缆道测验不能满足实施最严格水资源管理对水量、水质实时监控的需要,急需采用测流历时短、劳动强度低的流量测验方式,原有浮标缆道的部分部件多年未做改进更新,高水水面波动较大,浮标测验精度太低。该站2018年安装H-ADCP并率定后,严格按照《水文资料整编规范》对流量测验精度进行了比对分析,样本比测数据分析表明:小川水文站H-ADCP的流量测验数据精度满足规范要求,其H-ADCP的水深定位控制系统运行是有效和可靠的。
4 结论
本文所研制的水深定位系统可以快速、准确地自动调整H-ADCP所处水深位置,保证了流量测验精度,为H-ADCP在水位变动频繁的水文测站的推广运用创造了条件,对推进水文流量测验现代化,更好服务和保障最严格的水资源管理具有重要意义。
参考文献:
[1]高延雄,薛冰.浅析ADCP测流技术及使用中应注意的问题[J].水科学与工程技术,2014(4):58~60.
[2]杜兴强,沈健,樊铭哲.H-ADCP流量在线监测方案在高坝洲的应用与改进[J].水文,2018,38(6):81~83.
[3]景忠峰,郑德贵,杨君,等.水平声多普勒流速剖面仪应用浅析[J].三峡生态环境监测,2019,4(30):60~61.
[4]Siemens AG. SimaticS7-200可编程控制器手册[Z].北京:西门子电气传动有限公司,2007.
[5]盖超会,郑小涛.PLC和变频器在起重船控制系统中的应用[J].舰船科学技术,2016,38(2A):52~54.
[6]付宏刚.PLC应用过程控制研究[J].化工设计通讯,2019,45(2):82~83.
作者基本情况及联系方式:
吴德波(1982-),男,江苏连云港人,本科,高级工程师,主要从事水文水资源测报与建设管理。 通讯地址:河南省郑州市金水区城北路东12号水文局;邮编:450004;手机:(0)13838585655。电子信箱:54009240@qq.com。