船舶雷达与目标自动识别技术的信息融合
2021-11-17中国船舶重工集团公司第七二三研究所周浚璠
中国船舶重工集团公司第七二三研究所 丁 凯 周浚璠
从航海导航角度出发,雷达与目标自动识别系统是使用最为频繁的技术设备,通过二者的高效数据信息融合,能够较好地解决数据冗余和系统稳定问题,进一步为船舶提供精度高、可靠性强的数据信息。本文从融合原理出发,详细分析了技术体制整合、数据基础对接以及优化算法改进等内容,为实现雷达与AIS数据融合系统设计提供了参考,具有一定的借鉴意义。
1 雷达与AIS技术融合原理
1.1 雷达技术特点
雷达是导航装置中的重要设备之一,通过雷达可以对一定范围海域内障碍物、其他船只等进行定位,并通过回波信息分析对方的属性、大小,并精准定位以及采取航迹追踪有效实施避让,以满足远洋航行的基本安全。目前船舶上普遍安装的探测雷达能够实时侦测的范围较远,且基本能够不受一般天气状况的影响,具有较好的性能。由于雷达发射电磁波的绕射能力有限,不能够高效穿透或绕过障碍物,如遇特殊环境或极端气候,其探测性能急剧下降。
1.2 AIS工作原理
大型船舶远洋过程对于航线规划中的各类信息、航行过程中的运动状态等数据要求极高,AIS作为智能化程度较高的识别系统,其核心算法能够为船舶提供定位导航、指引前进线路、规划航行速度与方向等相关信息,起到了至关重要的作用。尤其是其可以在驾驶舱内通过数据可视化分析,准确获取周边环境范围内其他船只、障碍物的具体信息,并在某些特殊需求下自动规划航行线路,预测各类安全信息等。相较于探测雷达而言,AIS的传感系统在数据采集端不能够实时获取数据信息,即具有一定的延时性,且极易受到外界环境因素的影响。此外,中小型船舶不具备安装条件和运管能力。
1.3 数据融合的技术优势
从使用功能与各自特点上看,探测雷达与识别系统均为船舶航行的重要辅助设备,对于安全航行起到关键作用,且两者各有侧重点,各有优势项。如何高效、科学地将两者在技术体制上的优势联系起来,将数据信号处理方面的特点融合起来,将技术优势互补,将冗余数据剔除(如图1所示),从而能够得到更稳定的工作性能、更精确的使用数据,这是值得研究的问题。
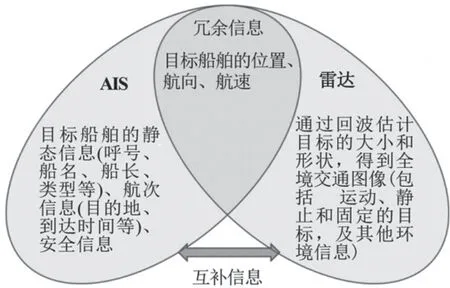
图1 基于雷达与AIS的信息融合示意图
(1)极端气候条件时(海浪大、雾气重等),可以打开大功率工作条件下高精度探测雷达,以实时捕获远距离、大范围的目标信息(含静态数据),解决AIS无法有效工作问题。
(2)环境条件满足基本工作条件时,以雷达探测数据为基准,重点辅以AIS的优化计算功能,突出AIS动目标预测、处理与显示功能。
2 雷达与AIS技术整合与模式选择
2.1 技术整合
技术的对接整合不仅仅是数据端的粗暴融合,而是从技术底层进行设计对接,需要进行信号端的综合数据采集、共享数据的分发处理以及数据二次建模等综合技术整合,即:依靠探测雷达的数据采集传感器将海量数据进行集中集采、接收和预处理,并结合AIS的门限设置与算法标准,对接收数据进行二次筛查和分析比对以及差异化处理,剔除数据空间中存在的冗余信息,针对具体细微参数进行组合算法的分析,以提供检测精度和数据分析能力。
2.2 模式选择
集中式、分布式以及混合式模式在实际系统设计过程中均可使用。其中,分布式的融合模式能够结合多信道数据采集端的接收信号,在数据分析处理前进行综合预处理以缩小探测范围、提高处理效率;通过航迹模拟以及预测分析,在数据关联和信息融合方面进行研究,最终得到理想的数据模型和检测结果。基于分布式融合模式可以有效降低数据中心的运算吞吐量,减轻系统运行的压力,在保证计算精度损失在可控范围内的前提下,提高运算速度,增强系统稳定度。考虑到在信号处理层面,精度的缺失可以通过优化算法弥补,且由于独立的数据处理机制可以保证系统运行的时效性和稳定性,因此,在实际工作中船舶航行系统设计一般采取的是雷达+AIS的分布式融合模式。
3 雷达与AIS数据融合系统设计
数据的融合对接技术的整合,从系统设计、数据建模到算法优化,能够有效提高最终目标检测与识别的范围、精度。
如图2所示,雷达与AIS天线接收端同时获取空中多目标数据信息,从差异性的角度出发进行数据融合:(1)两部天线接收数据经预处理形成统一信号样式,即将时间、空间数据投射到一个坐标系中,作为数据对接的前提;(2)融合数据进行去相关处理,包括时间相关与方位相关等信息,作为数据处理的基础;(3)差异数据进行二次分析,提取脉内信号特征,包括航迹、点迹以及抗干扰处理等,作为数据输出的核心。
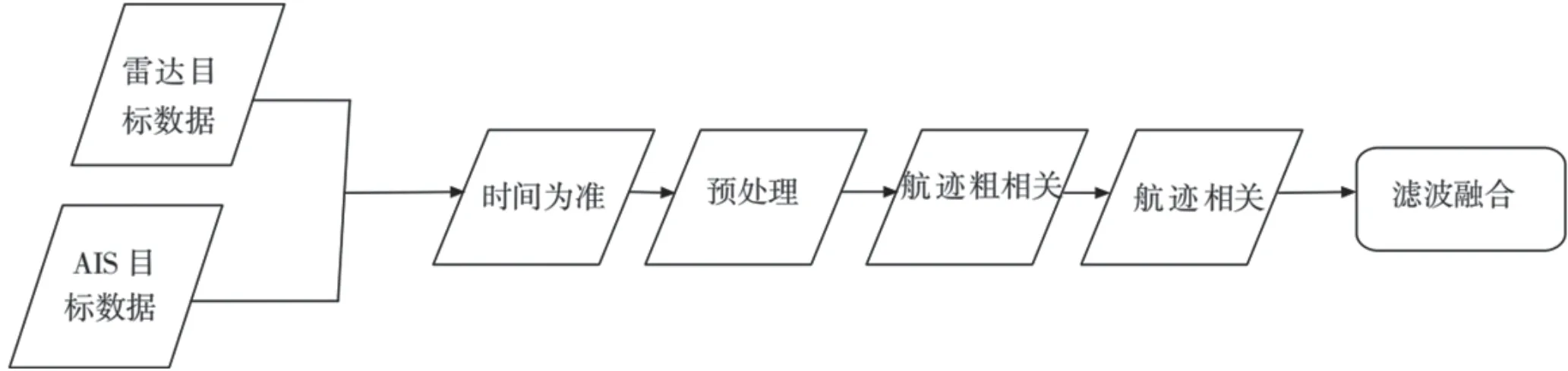
图2 雷达与AIS数据融合系统流程
3.1 样式匹配
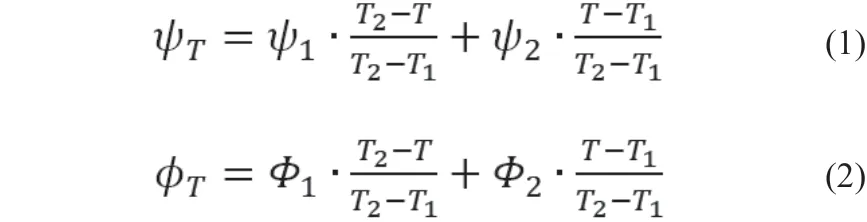
AIS的时间数据是由北斗进行授时,时间的精确性可以保证。考虑到雷达与AIS采集数据的时长有所不同,需要采取LMS算法将信号拉伸到统一长度后,将信号投影到同一坐标系中进行后处理。通常情况下,采用的Gauss-Kruger投影法将空间目标的经纬度数据统一到Cartesian坐标系中,原点可以设置为实时坐标点。采样间隔是随着船舶航行状态不断变化的,通常假设沿某方位角沿直线运动,利用插值法计算某时刻T的位置信息,如式(1)、式(2)所示。
3.2 数据相关
由于动目标检测过程中存在的测量数据误差,以目标运动轨迹预测为基准,将数据相关性取出后,进行航迹预测与分析。建立采集数据集合γ,对于任意元素?而言,如式(3)所示:

由于雷达远距探测目标精度高,这里以雷达测量值为基准。当TO=T 时,此时可以优化计算缩小区间范围得到AIS的求值数据。
3.3 航迹融合
航迹融合过程中,需要结合两种数据中的关键信号特征才能够得到准确计算精度。所以,在分析预计运行的航迹时,可以先将预处理的数据进行合并,再进行点迹融合,并依托于数据端的差异赋值不同的加权因子,如式(4)、式(5)所示,最后采取抗干扰算法,即离散Kalman滤波,进一步消除了噪声与杂波的影响,提高最终输出的精确度。
结束语:在复杂航行条件下,通过系统设计与算法优化,将雷达与AIS进行数据融合与技术整合,能够有效提升系统运行的稳定性、运行效率以及航迹测算的精度。在此基础上,可以采取相关措施确保整个航行过程的安全,同时为未来智能化技术应用打下坚实基础。