可见光虹膜图像的特征匹配仿真
2021-11-17涂娟
涂 娟
(西华大学,四川 成都 610039)
1 引言
智能移动设备上的可见光虹膜图像识别匹配是将传统的虹膜识别技术嵌入到手机、平板电脑以及其它智能移动设备的生物识别技术。现今生物识别领域的研究可以分为红外图像虹膜识别匹配和可见光虹膜图像识别匹配两方面。其中可见光虹膜图像识别匹配方法的使用条件不局限于嵌入式的移动设备。虹膜指的是人体眼睛上的一种构成部分,从外观上可以将人眼结构分为巩膜、虹膜、瞳孔三个部分,在虹膜的中心有一个圆形的开口,也就是人眼当中瞳孔的位置[1]。在不同的环境下,虹膜会根据可见光强度的变化来调整虹膜的使用状态,使得可见光光束可以穿透瞳孔进入眼睛,以这种方式来传递光束信息。随着科技技术的不断创新,将虹膜作为身份识别的重要介质,利用激光来扫描虹膜就可以确认对象的身份。现如今虹膜识别已经成为了一种较为安全和精准的身份识别方法,利用图像采集装置来捕捉用户眼睛中的图像,并从中分离出虹膜图像,对其中包含的特征信息进行提取、编码,进而实现虹膜图像特征的匹配。
现如今针对虹膜识别技术中的可见光虹膜图像匹配方法已经形成了一定的规模,应用频率较高的图像匹配方法包括:基于SIFT的图像匹配方法、基于边缘几何的图像匹配方法和基于主成分分析的匹配方法[2]。其中基于SIFT的图像匹配方法是主要是利用尺度变换算法,在图像匹配的过程中在图像中检测出一个关键点作为图像局部匹配的描述子,利用描述子与基准图像进行对比匹配得到匹配结果。这种匹配方法匹配时间较短,但存在严重的匹配准确度低的问题。基于边缘几何的图像匹配方法在实现的过程中,需要对虹膜图像进行边缘几何分割,这种方法改善了SIFT图像匹配方法中存在的不足,在静态环境下提高了图像的匹配准确率,但虹膜图像极易受到外界可见光的影响,在有其它因素干扰的情况下,会使得匹配的正确率大大下降。基于主成分分析的匹配方法可以基本过滤外界微弱光线的干扰,在有微弱可见光影响的情况下,可以达到较高的正确率,但这种图像匹配方法的精度较低,无法得到较高的准确匹配结果[3]。为了解决传统方法中存在的问题,提出可见光虹膜图像的特征匹配方法,保证在可见光环境干扰的环境下,保证虹膜图像的匹配准确性。
2 可见光虹膜图像的特征匹配方法设计
可见光虹膜图像特征匹配方法的实现主要分为四个步骤:图像采集、图像预处理、图像特征提取和特征模式匹配,该匹配方法的具体实现流程如图1所示。

图1 特征匹配方法实现流程图
分析图1可知,特征匹配首先需要获取可见光虹膜图像,然后对虹膜图像进行预处理,然后定位虹膜边界,进行图像归一化处理,并对处理后的结果与数据库中的信息进行比对,匹配结果一致则输出匹配结果;反之,回到虹膜边界定位,重新定位。
2.1 生物虹膜图像采集与处理
虹膜的图像采集需要在人体眼睛的位置进行图像提取,在可见光的影响下,使用精密的仪器设备进行图像采集[4]。首先保证仪器设备在眼睛上准确对焦,得到清晰的、分辨率较高的虹膜图像采集结果。将采集结果通过传输设备传输到PC机端,进行虹膜图像预处理。
图像采集设备采集到的原始图像虽然能够保证一定的清晰度和分辨率,但由于可见光的干扰和人眼的复杂环境,使得采集的图像存在噪声、眼睑、睫毛等因素的干扰,因此需要通过图像预处理对原始图像进行降噪除杂处理。
在可见光虹膜图像采集的过程当中,无法保证虹膜上接受的可见光照是完全均匀的,这样会导致采集到的虹膜图像区域明暗程度不同[5]。因此需要对虹膜图像进行可见光均匀矫正。将采集到的原始虹膜图像进行分割处理,把每一个图像区域映射成一个由像素值aij来表示的可见光照强度的估计值,完成映射后形成原始虹膜图像的光强估计矩阵,原始虹膜图像的像素矩阵的表示方法为

(1)
随原始图像进行映射处理,映射关系为

(2)
将原始图像矩阵中的每一个像素点经过映射关系,可以得到平均照度矩阵为

(3)
接着对图像的光照估计矩阵进行扩展处理,得到一个与原始虹膜图像尺寸相同的图像,并完成所有行的插值运算得到背景照度图[6]。在此基础上,进行虹膜纹理部分的增强处理。
对可见光均衡化结果中的每一个像素点进行累积分布转换,实现图像增强。累积分布转换函数为

(4)
式中F(I)表示的是图像矩阵I的累积分布转换函数,pi为图像中每一个像素点随机变换的概率值[7]。按照转换函数,对图像矩阵I进行变换,得到离散形式的图像增强结果。
使用高斯平滑滤波器对增强后的图像进行降噪处理。增强图像s(i,j)经过卷积后,输出的图像可以表示为G(i,j),G(i,j)的求解过程如公式所示。
G(i,j)=f(i,j,δ)*s(i,j)
(5)
式(5)中,f(i,j,δ)为高斯平滑函数,滤波后得到二维矩阵图像数据。分别计算图像卷积方向和梯度幅值。比较当前像素点的梯度幅值和方向与相邻像素点的一致性,若梯度求解结果大于相邻像素点,且卷积方向小于45度,则判定该像素点不属于噪声像素点,可以进行下一个像素点的检测。否则,则判定该像素点为噪声像素点,需要进行滞后阙值处理[8]。设梯度幅值的极大值和极小值为滞后阙值的高阙值和低阙值,将噪声像素点进行循环滤波处理,直到像素点的梯度幅值落在滞后阙值范围内。增强图像中的每一个像素进行噪声消除处理,输出结果即为虹膜图像的瞳孔降噪结果。
按照眼睑的形状采用曲线霍夫变换公式,对眼睑进行检测。眼睑检测曲线公式可以描述为
(sinθ(x-h)+cosθ(y-k))2+acosθ(x-h)=0
(6)
其中a表示的是曲线曲率,(h,k)为曲线顶点的坐标[9]。使用该曲线对眼睑进行检测,对检测结果位置进行去除,去除结果如图2所示。
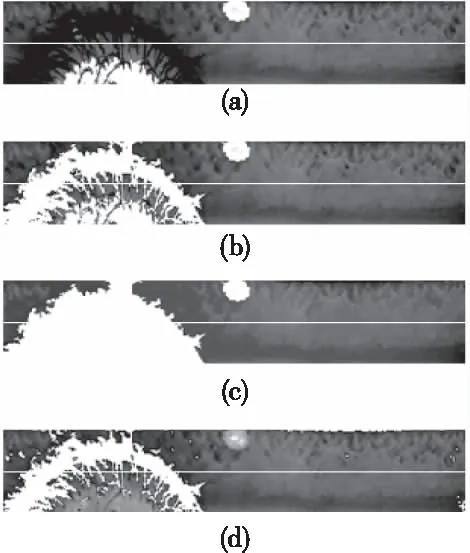
图2 眼睑和睫毛去除效果图
2.2 虹膜边界定位
将预处理完成的图像s′(i,j),根据式(7)进行虹膜边界定位。图像的水平方向边缘定位结果为
h(i,j)=s′(i+1,j)-s′(i-1,j)
(7)
同理图像的垂直方向边界定位结果为
v(i,j)=s′(i,j+1)-s′(i,j-1)
(8)
另外,除了水平方向与数值方向之外,虹膜图像上45度与135度方向上的边界定位公式如下
d(i,j)=s′(i±1,j±1)-s′(i±1,j±1)
(9)
按照式(7-9)的边界定位方法得到虹膜定位。
2.3 ORB算法提取特征点
2.3.1 特征点方向分配
为了获得理想的特征点,利用ORB算法对特征点添加方向信息并进行方向分配。特征点方向分配的过程如图3所示。

图3 生成特征向量
以虹膜图像的特征点为中心,以r为半径的邻域,将特征点与质心之间的向量作为主方向,对于特征点而言,其在虹膜图像边界内的邻域可以表示为

(10)
其中,xp、yp为虹膜图像的上、下边界,s′(x,y)为虹膜图像变换函数。那么,特征点及其邻域内的灰度情况可以表示为
(11)
其中,p(x)为特征向量函数,p(y)邻域极值函数,τ结果为1的像素特征点保留其方向,而τ结果为0的像素特征点,其距离最近的邻域特征值的方向即为该特征点的方向[10]。
2.3.2 特征点粗提取
将方向分配完成的像素点集合记为L,按照特征点的方向进行特征粗提取。将方向相同的特征点划分为相同的特征区域当中,对虹膜图像中的像素点进行逐层提取,最后依次计算每一个区域内特征点的描述向量dv,得到特征的粗提取结果。
2.3.3 特征点筛选
对特征粗提取结果进行筛选处理,保证特征点的准确性。设置特征点筛选矩阵为

(12)
在筛选过程中只需要对特征点的位置进行筛选,不需要计算D(x,y)的具体特征值。检查逐行计算特征点并检查是否符合式(13)中的条件。

(13)
其中,tr(D)虹膜图像噪声像素点变换函数,det(D)为虹膜图像中心像素点变换函数。若特征点满足式(13)中的表达式,则该特征点在虹膜图像的内外边缘之间,不需要筛选[11]。若不满足,则该特征点在虹膜图像的内边界之内,或外边界之外,则需要将该特征点剔除。
2.4 特征点匹配
虹膜特征点粗提取后,获得较为混乱的特征点信息,根据最短特征描述子与关键特征点之间的相似程度进行异或和处理,进而判断特征点匹配结果。将特征点的筛选结果进行匹配,匹配过程如图4所示.

图4 特征点匹配
特征点匹配分为一阶和二阶两个步骤,输入提取的特征点,并对虹膜特征进行编码[12]。计算处理完成的虹膜图像特征点与数据库中基准图像的特征点相似度。得到的相似度作为二维参数输入数据库分类器进行匹配分类,输出可见光虹膜图像的特征匹配结果。
3 仿真分析
3.1 虹膜图像数据库
在仿真当中建立基准虹膜图像数据库作为图像特征匹配的匹配标准。仿真中建立的虹膜数据库为CASIA5.0,其中包括443人的双眼虹膜图像,每一只眼睛采集29个不同状态、不同可见光下的样本。虹膜图像数据库中的图像总数量为1772幅,且保证数据库中的每一幅图像的分辨率均在300dpi以上,统一数据库中虹膜图像的尺寸为640*480,色彩深度为8位灰度。将虹膜图像数据库分为两个部分,分别即为数据A库和数据B库。数据库中所有左眼的虹膜图像划分为数据A库,而右眼的图像归一化为数据B组。
3.2 仿真平台
可见光虹膜图像特征匹配方法的仿真平台采用安装有MATLAB R2018b软件的PC机编程实现仿真。仿真PC机的电脑配置为:2.42GHz的Intel(R)Pentium CPU,电脑的内存RAM为4.00GB,PC机的操作系统为Windows8.1的64位系统。
3.3 仿真过程
在仿真平台中输入可见光虹膜图像的特征匹配方法的设计代码,为了凸显设计方法的性能,在实验中设立传统的图像匹配方法作为实验的对比方法。设立仿真对象为20组,将20组仿真对象平均分为两组,保证每一组的对象相同。使用两种图像匹配方法对实验对象进行匹配,并使用准确率计算公式,得出有关于匹配准确率的仿真结果。
3.4 仿真结果分析
按照仿真过程进行实验,原始图像与相同尺寸的背景照度图做差运算,实现可见光的光照补偿。使用直方图进行可见光均衡化校正,调整对比度。经过可见光均匀矫正得到如图5中的均衡化直方图。

图5 可见光均衡化直方图
分析图5可知,经过均衡化的图像图分布更为均匀,能够提升可见光分布,具有更好的匹配精度。在此基础上,对虹膜图像进行边界定位,定位结果如图6所示。

图6 定位后的虹膜图片
分析图6可知,采用边际定位技术能够提升虹膜图片的定位准确度,以便更好的进行特征匹配。
与虹膜图像数据库中的图像进行匹配得出匹配结果。经过统计与计算得出仿真数据结果,如表1所示。

表1 仿真结果
从表中的数据可以看出,对相同的实验对象进行匹配,传统匹配方法检测到的特征点有32个,而可见光虹膜图像特征匹配方法检测的特征点为64个。两种图像匹配方法在仿真平台下得到匹配结果,经过计算可见光虹膜图像特征匹配方法比传统图像匹配方法的匹配准确率高15%。
4 结束语
为了降低可见光对采集虹膜图像的干扰,提升虹膜特征匹配准确度,提出一种基于特征提取匹配的可见光虹膜匹配方法。通过可见光均匀矫正等相关技术对采集生物虹膜图像特征进行预处理,根据虹膜边界定位技术对虹膜图像特征匹配范围进行缩减,通过ORB算法提取虹膜图像特征点,经过特征筛选后对特征点匹配,实现可见光虹膜图像特征匹配过程。经过仿真可知,所提方法具有较高的匹配精度,匹配准确率已达95%。
迄今为止,可见光虹膜匹配方法的匹配准确率仍然位居生物特征识别系统首位。但虹膜因位于人眼内部,采集过程中需要用户配合,而且难免会受到眼睑及睫毛的遮挡,不易准确捕获虹膜图像。同时虹膜图像的采集需要专门的设备,构造复杂成本昂贵,一定程度上限制了虹膜图像匹配方法的应用范围。因此在未来的研究过程中,需要针对该问题进行改进,这也是可见光虹膜图像特征匹配方法未来研究中要解决的主要问题。