双臂机器人协调轨迹滑模鲁棒控制算法研究
2021-11-17郑秀娟张金亮
贾 蓉,郑秀娟,张金亮
(1. 湖北汽车工业学院电气与信息工程学院;湖北 十堰 442002;2. 武汉科技大学信息科学与工程学院,湖北 武汉430081)
1 引言
在工业领域中,机器人始终有着广泛的应用,其中,双臂机器人由于能够实现更为复杂的操作而备受瞩目[1]。但是,双臂机器人控制系统非线性、高耦合现象严重,难以构造精确的控制模型[2]。而且,在机械臂工作过程中,受到的扰动未知且非确定,会令模型失效[3]。尤其在柔性关节机械臂中,内外部参数的动态非确定性导致轨迹控制精度与稳定性较差[4]。这些问题严重阻碍了双臂机器人在高精度控制领域中的应用推广。目前关于双臂机器人协调轨迹控制已经引起关注,但是研究成果不多。考虑到双臂机器人控制系统的特性,可以从模型构造进行性能优化,文献[5]基于关节对轨迹的影响,构造了关节转矩模型,并引入最小二乘法计算模型变量。因为在受到外部扰动时,会引发系统模型改变,依靠模型优化并不能彻底有效的提升双臂机器人控制性能,所以当前研究更偏重于引入算法提高控制性能。其中滑模控制因其不依赖精确的数学模型,并且抗扰动效果好,算法复杂度低,成为主流的算法解决方案。文献[6]根据机械臂关节角度偏差,设计滑模控制器,该方法针对特定机器人具有较好的控制效果,但是没有考虑到滑模抖振与柔性关节的影响。文献[7]在滑模控制基础上,引入RBF神经网络来拟合扰动项,从而弥补滑模抖振,但是算法复杂度过高,使得调节时间过长。文献[8]和文献[9]针对滑模抖振问题,都引入模糊思想对滑模控制变量采取自整定处理,获得了较好的抗扰动能力。为进一步提高双臂机器人协调控制性能,根据现有研究成果的优缺点,本文设计了一种关节轨迹滑模鲁棒控制算法,从而获得更好的控制精度与鲁棒性。
2 机械臂模型与偏差分析


(1)

(2)


(3)
考虑到机械臂运动时,由关节转子和连杆的异步特性产生柔性偏差,这种偏差要比几何偏差对控制效果的干扰更加严重,所以这里对该偏差的分布进行深入分析。在完成任务动作过程中,机械臂连杆轨迹绕驱动关节旋转,转动半径是连杆长度,当机械臂上某个关节产生偏差时,其偏差向量描述如下

(4)


(5)


(6)
fconv(·)代表卷积操作,偏差分布在组合点构成的凸多面体上。
3 滑模鲁棒控制算法

(7)
根据模型与扰动偏差分析,本文设计如图1所示的滑模控制策略,该控制策略通过对控制输出与系统偏差的自整定,来降低对真实模型参数与真实扰动精度的依赖。

图1 双臂机器人滑模鲁棒控制框图
在滑模控制策略中,滑模趋近律采用如下形式

(8)

(9)
对于机械臂动作受到内外扰动,假定关节i在扰动量fpi时的实际观测值是foi,结合角度位置与惯性,可以得到向量

(10)
令hi=(A)i,H=diag(h1,h2,…,hn),得到机械臂上关节i的控制器如下

(11)
对应的滑模趋近律表示为

(12)
据此,在轨迹收敛时si随时间的变化表示如下

(13)

(14)
其中,0<λ<1。如果控制参数向背离滑模面发展,也就是|s|→∞,则ε→λ-1,此时趋近的速率会逐渐变快。如果控制参数向接近滑模面发展,也就是|s|→0,则ε→|dε|/(1+|dε|),在角度位置偏差降低的过程中,趋近的速率会逐渐变慢。这样,就可以有效抑制滑模控制出现抖振现象。引入Lyapunov函数
(15)


(16)

(17)
至此,滑模鲁棒控制输出描述如下

(18)
4 双臂机器人协调运动性能仿真
基于Matlab仿真平台构造双臂机器人运动模型,并采取Roboticstoolbox实现其数学方程。首先调用Link函数建立初始模型,设定机械臂的关节参数。其中左机械臂参数给定为L=(π/2,π/5,π/4,-π/3,0),右机械臂参数给定为R=(π/4,π/5,π/8,-π/3,0)。再利用fkine函数构建运动位姿,其生成的关节角为

(19)
(20)
机器人机械臂动作时注入的外部扰动信号如下
d(t)=

(21)
根据模型得到的双臂机器人机械臂运动模型如图2所示。

图2 双臂机器人仿真模型
基于双臂模型的模拟仿真,分析本文设计的关节轨迹滑模鲁棒控制算法的实际性能。利用Robotics toolbox内的jtraj函数,针对左机械臂某次动作采样,描绘出其空间运动轨迹,对应轨迹曲线描述于图3中。在该次动作过程中,仿真得到机械臂的关节参数变化情况,结果如图4至图6所示。

图3 左机械臂空间运动轨迹
根据图4至图6所示的实验结果可以看出,在双臂机器人未动作,或者动作完成时,机械臂上所有关节的角速度与角加速度参数全部是零。在机械臂动作时,角加速度先是快速增加,提高角速度使其达到稳定状态,在动作即将完成时,加速度反向增加,控制速度快速下降。整个动作过程中,所有机械臂的各项参数变化全部保持平滑稳定,其间未发生过刺突或者抖振现象。这表明本文提出的滑模鲁棒控制算法能够有效抑制双臂机器人动作时的扰动,获得更加协调稳定的双臂运动轨迹。

图4 机械臂关节角位移
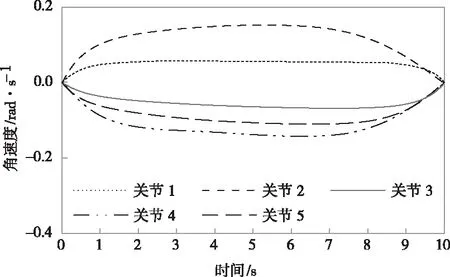
图5 机械臂关节角速度
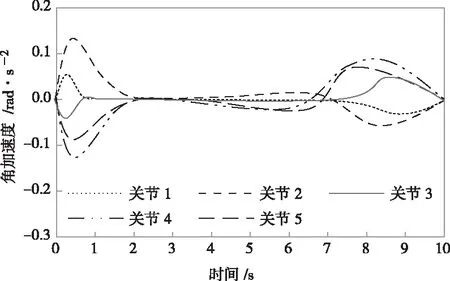
图6 机械臂关节角加速度
在双臂协调动作时,仿真得到机械臂任意关节的转角轨迹跟踪曲线,结果如图7所示。根据关节转角的轨迹追踪可以看出,仅在初始阶段不足1s的时间内,实际轨迹与预期轨迹间产生了相对较明显的偏差,随后始终保持实际轨迹与预期轨迹的良好拟合,表明本文方法具有良好的控制精度,而且轨迹始终保持稳定无抖振。
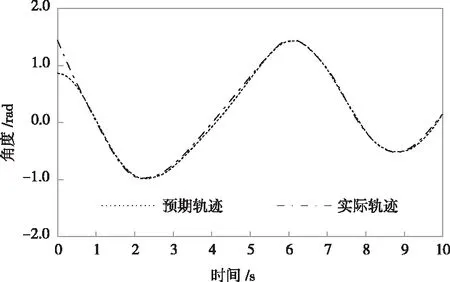
图7 机械臂转角轨迹跟踪曲线
仿真得到本文、文献[7]与文献[8]控制方法的机械臂轨迹控制偏差,结果如图8所示。根据结果对比可以看出,本文方法的偏差曲线符合转角轨迹实验曲线,仅在初始动作时有一个较为明显的偏差,经过快速整定后,通过滑模鲁棒控制算法实现了良好的轨迹协调控制,虽然存在内部模型与外界扰动,但是仍然具有比其它方法更好的轨迹控制偏差,表明本文方法具有良好的控制精度、调整速度,以及抗扰动能力。
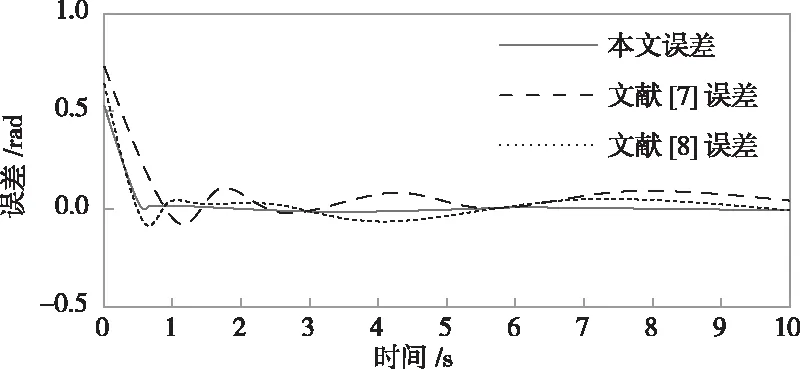
图8 机械臂协调轨迹误差曲线
5 结束语
为了优化双臂机器人的协调控制能力,本文设计了一种关节轨迹滑模鲁棒控制算法。基于模型与偏差分析,将惯性、离心和重力表示为机械臂轨迹控制时预期的输出量,将控制力矩表示为鲁棒因子,用于控制偏差大小。利用关节角位置的偏差设计滑模变量与趋近律,使控制算法能够快速稳定收敛。通过Matlab与Roboticstoolbox构造双臂机器人仿真模型,根据机械臂空间运动过程中关节角位移、角速度、加速度、轨迹跟踪,以及轨迹误差曲线,证明了提出的控制算法收敛速度快,控制轨迹偏差小,能够有效抵抗内外部扰动,提高系统控制精度与稳定性。