基于有限质点法的牵引走板与双滑车多体动力计算方法*
2021-11-16秦剑江明景文川贾宁李刚
秦剑 江明 景文川 贾宁 李刚
(1.中国电力科学研究院有限公司,北京 100055)(2.国网四川电力送变电建设有限公司,成都 610051)
引言
牵引走板是输电线路工程张力放线施工中用于连接牵引钢丝绳和各子导线的专用工具,有一牵二、一牵四、一牵六等不同型式.走板由钢板焊接而成,由牵引钢丝绳带动,牵引导线通过输电线路铁塔上的各个放线滑车.当线路铁塔间的转角、高差较大时,需悬挂双放线滑车,增加滑车承载能力,减小导线对滑车的包络角[1,2].
随着特高压工程建设的开展,大截面导线普遍应用,牵引走板质量、体积也不断增加,在冲击力的作用下对滑车和导线会产生一定损伤,严重时会发生滑车破损而导致放线事故,造成较大的经济损失.因此牵引走板、放线滑车的设计与安装成为特高压工程放线施工中关注的重点[3-5].目前,张力放线过程中牵引走板与滑车的接触冲击过程尚未开展相关研究,缺少滑车所受冲击载荷、滑车悬挂摆动等施工关键因素的计算分析方法,对双滑车结构的理论研究更属空白.
有限质点法以向量力学和数值计算为基础,将结构离散为质点群,采用牛顿第二定律描述这些质点的运动,避免求解非线性方程组和整体刚度矩阵,适于计算发生刚体位移和几何大变形的结构,在处理结构大变形、接触、碰撞等非线性问题方面取得良好的应用效果[6-8].在结构接触计算方法中,Lagrange乘子法精度较高,但增加了未知量数目[9],而罚函数法以接触刚度系数与界面侵入量的乘积作为接触力,使无穿透的约束条件近似得到满足[10-12],计算方便且不增加方程数量,在多体系统碰撞计算中获得了广泛的应用.俞锋等[13]结合罚函数法采用有限质点法对索与滑轮接触进行分析,张鹏飞等[14]针对杆、板等结构提出了接触力的简化计算方法,秦剑等[15]对索道载荷过鞍座冲击的影响进行了深入计算.
本文在有限质点法的基础上提出牵引走板与双放线滑车系统的动力计算方法,分析牵引走板与双放线滑车在接触下的作用影响,为张力放线施工安全提供技术参考.
1 牵引走板与放线滑车运动系统
在牵引机的牵引力及张力机的张力作用下,钢丝绳、牵引走板及导线连续通过线路中各个铁塔横担下悬挂的放线滑车(组),直至放线过程结束.如图1所示.

图1 牵引走板通过滑车Fig.1 Traction plate passing through the pulley
1.1 多体系统位置
将牵引钢丝绳、牵引走板、导线及双滑车、滑车悬臂、滑车连接杆看作由多个部件组成的多体运动系统.放线滑车悬挂在铁塔横担上,悬挂点J1、J2,并以J1为原点建立平面坐标系,如图2所示.牵引绳(AB)、牵引走板(BC)、导线(CD)依次通过以O1、O2为中心的滑车.放线滑车在悬臂的作用下绕悬挂点J1、J2发生前后摆动.牵引方向及张力方向由放线整体工况确定,并在运动过程中保持不变.
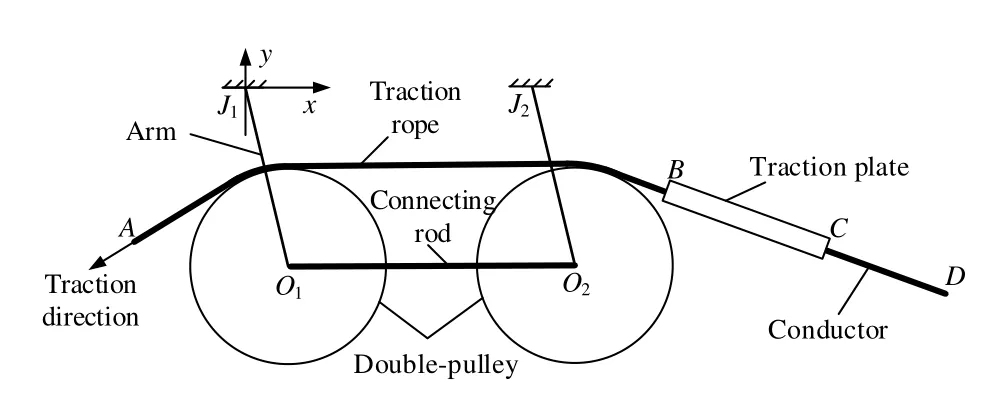
图2 牵引走板与双滑车运动系统Fig.2 An illustrative system of traction plate and double-pulley
1.2 系统单元及节点
在牵引力与张力的作用下,牵引绳、导线可视为柔性的线弹性单元,仅承受轴向拉力,运动过程中弹性模量及截面积保持不变.因此设置牵引绳单元AB,单元初始长度为sAB,弹性模量与截面积乘积为EAR.导线单元CD,单元初始长度为sCD,弹性模量与截面积乘积为EAC.牵引走板为钢制,在接触过程中无变形,视为矩形刚性单元,单元长度为sBC,厚度为bP,走板与钢丝绳、导线连接节点B、C位于单元轴心线,下部顶点为P、Q,如图3所示.

图3 走板与滑车示意图Fig.3 Schematic diagram of traction plate and pulley
悬挂单元O1J1、O2J2的初始长度为sOJ(在此认为2个悬挂单元长度相同),弹性模量与截面积乘积为EAJ.双滑车为完全相同的圆形刚性单元,中心为O1、O2(下文中以O1、O2表示2个滑车),半径为R.双滑车间隔单元O1O2,单元初始长度为sOO,弹性模量与截面积乘积为EAO.将单元质量均匀集中于质点B、C、D、O1、O2上,则各质点质量为:

式中,ρR、ρC、ρJ分别为牵引绳、导线、悬挂单元的单位长度质量;mP、mK分别为牵引走板、滑车质量.
1.3 牵引绳、导线与滑车的接触
在实际中,牵引绳、导线只会与滑车的上部(高于中心O1、O2的部分)发生接触,因此为简化分析,从牵引绳、导线与滑车上部的接触点入手判断接触情况 .节点A到滑车O1、O2上部的切点为A1、A2,节点B到滑车O1、O2上部的切点为B1、B2,滑车O1、O2的上部外切线切点为U1、U2,如图4所示.以单元AB对滑车的切点水平位置判断对滑车的包络角,并获得单元AB在接触后的长度.

图4 AB与双滑车接触状态Fig.4 AB is contacted with two pulleys
(1)当AB与滑车O1、O2同时接触,如图4(a)所示,AB的长度可表示为

其中,β1、β2为AB对滑车O1、O2的包络角lU1U2、lO2B、lA1U1、lU2B2分别为O1到A、U1到U2、O2到B、A1到U1、U2到B2的距离 .
(2)当AB仅与滑车O1接触,如图4(b)所示,AB的长度可表示为

(3)当AB仅与滑车O2接触,如图4(c)所示,AB的长度可表示为

(4)其他情况下AB与滑车O1、O2不接触.单元AB的长度SAB为A、B的距离lAB.
导线CD与滑车的接触判断可按上述方法实现,仅需将A、B替换为C、D即可.
1.4 牵引走板与滑车的接触
牵引走板BC在运动体系中为刚性体,与滑车接触过程中不发生弯曲变形,牵引走板下部边界PQ与滑车O1、O2接触.因此可以通过直线PQ与滑车的关系判断接触情况.如图5所示,图中①~③表示不同的接触状态.首先判断牵引走板与滑车O1的接触关系:
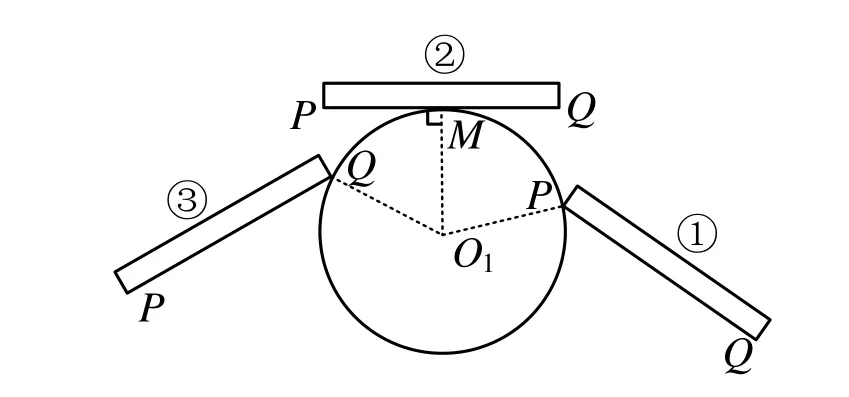
图5 牵引走板与滑车接触Fig.5 Traction plate is contacted with the pulley
其中,lO1P、lO1Q分别为O1到P、O1到Q的距离.其他情形下走板与滑车O1无接触.走板与滑车O2的接触判断与O1相同,仅需将O1替换为O2即可,不再赘述.
2 多体运动系统动力计算方法
2.1 有限质点法
在此采用有限质点法分析牵引走板与放线滑车多体系统的运动.系统中各单元的变形通过具有集中质量的质点位移表示,质点在单元内力和节点外力的共同作用下遵循牛顿第二定律进行运动.质点运动方程可表示为

式中,m为质点质量;̈为质点加速度矢量;F为质点所受合力矢量.采用中心差分法来求解质点的运动方程.令h为时间增量步长,节点运动时间tn=nh,n≥ 0;xn-1、xn和xn+1分别为第n-1、n和n+1个时间步的质点位置向量,Fn为第n个时间步的质点合力矢量.考虑结构阻尼影响,引入阻尼系数ζ,由中心差分公式得到第n+1步的质点位置向量:

式中,c1=1+ζh2,c2=1-ζh2.
2.2 质点作用力
(1)牵引绳、导线对质点的作用力
牵引绳AB与滑车发生柔性接触,线弹性单元AB内力可表示为

单元AB对质点A、B、O1、O2的作用力fAB-A、fAB-B、fAB-O1、fAB-O2表达式可根据牵引绳与滑车的不同接触状态(图4)得到,具体如表1所示.
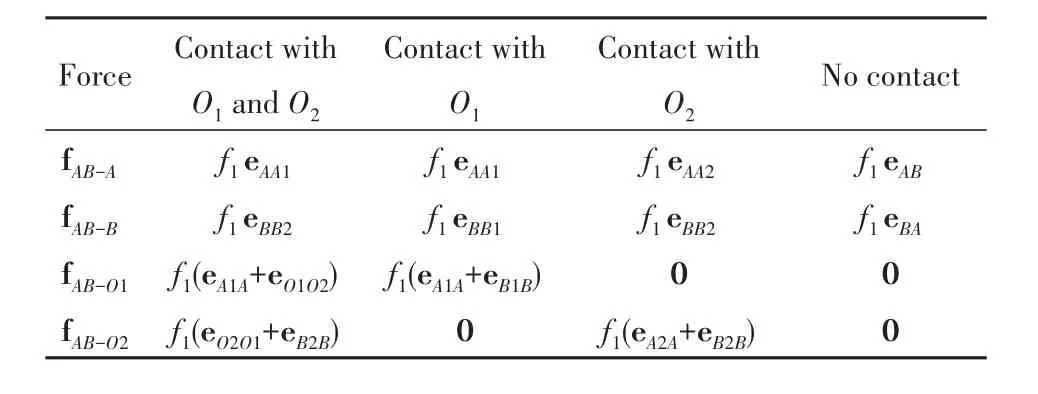
表1 不同接触状态下的牵引绳对质点作用力Table1 Force exerted by traction rope on the particles under different contact conditions
为简化叙述,以e表示单位向量,下标表示向量方向,即eAA1表示从A到A1的单位向量.其他向量采用同样的表示方法,不再一一说明.同样可以获得单 元CD对C、D、O1、O2的作用力 fCD-C、fCD-D、fCD-O1、fCD-O2.
(2)牵引走板对质点的作用力
走板与滑车O1、O2先后发生碰撞接触,其法向接触力等于侵入量与法向刚度系数的乘积[13],因滑车在接触过程中发生转动而忽略摩擦接触力.当走板的P点与滑车O1发生点接触时(图6),走板对滑车的侵入量为R-lO1P,则单元BC对质点O1的作用力可表示


图6 牵引走板与滑车接触Fig.6 Contact force between traction plate and pulley
其中k为法向刚度系数(可取值106).当PQ与滑车O1发生线接触时,最大侵入点M,侵入量为R-lO1M,则单元BC对O1的作用力可表示


2.3 系统运动过程计算
质点A在牵引力的作用下,向牵引侧运动,在放线过程中维持恒定速度vA,则

通过张力放线施工整体计算[16],确定vA及张力矢量TC.在得到tn时的质点位移后,即可计算得到各单元内力,进而得到各质点所受作用力.根据式(6)可获得tn+1时的质点位移,直至运动过程结束.

表2 各质点所受作用力Table2 Forces on the particles
3 牵引走板与放线滑车接触计算分析
根据特高压工程中张力放线施工的典型技术参数,开展牵引走板通过双放线滑车的运动过程计算,分析施工中重点因素对滑车载荷、摆动角等参数的影响.
3.1 接触动力过程分析
典型工况1:走板通过滑车时运行速度1.0m/s、牵引角度20°(牵引方向与水平的夹角)、张力角度-10°(张力方向与水平的夹角)、张力25kN、走板厚度0.1m、悬挂长度(sOJ)1.0m.计算中,参数ζ=0.2,h=10-4,运动过程时间t=5.2s.走板通过双滑车的过程如图7(a)~(h)所示.

图7 牵引走板通过双滑车全过程Fig.7 The whole process of traction plate passing through the double-pulley
施工中主要关注滑车所受最大载荷,因此针对滑车所受载荷与滑车摆动角度进行分析,计算结果如图8所示.从图8(a)可知,走板与双滑车经历了无接触—与滑车2接触(从P到Q)—脱离接触—与滑车1接触(从P到Q)—脱离接触的过程.图中,①:走板与滑车2未接触;②:走板前端与滑车2点接触;③:走板与滑车2线接触;④:走板末端与滑车2点接触;⑤:走板与滑车2脱离;⑥:走板前端与滑车1点接触;⑦:走板与滑车1线接触;⑧:走板末端与滑车1点接触;⑨:走板与滑车1脱离.整个过程中滑车1的最大悬挂载荷发生在阶段⑦,滑车2的最大载荷发生在阶段③.如图8(b)可知,当走板与滑车1发生线接触时,滑车向牵引方向的摆动角达到最大;走板与滑车1脱离接触时,滑车向张力方向的摆动角达到最大.

图8 走板通过双滑车过程分析(典型工况1)Fig.8 Process analysis of traction plate passing through double-pulley(typical condition 1)
通过计算发现牵引走板厚度和滑车悬挂长度对滑车载荷有较大影响,因此设置典型工况2:走板厚度0.3m、悬挂长度4m,其他参数与典型工况1相同.滑车载荷、滑车摆动角度结果如图9所示.从图9(a)可知,走板经历了无接触—与滑车2接触(从P到Q)—与滑车2、滑车1反复脱离、接触—与滑车1接触(从P到Q)—脱离接触的变化过程.其中,①~④的状态与典型工况1相同;⑤~⑥为走板与滑车1、滑车2反复脱离、接触阶段;⑦~⑩与典型工况2的⑥—⑩状态相同.

图9 走板通过双滑车过程分析(典型工况2)Fig.9 Process analysis of traction plate passing through double-pulley(typical condition 2)
滑车的摆动角度与典型工况1近似,在中期因走板与滑车1、2的反复脱离、接触而有波动.从典型工况1、2结果中可知,随着放线滑车悬挂长度增大和走板厚度增加,走板通过双滑车的运行状态发生了复杂变化,产生了与滑车1和滑车2反复接触的变化过程,滑车载荷、摆动角度也有大幅增大.
3.2 重要因素的影响分析
特高压输电线路工程中,受实际条件影响,施工安装中滑车的悬挂长度有较大变化;另外牵引走板通过滑车时因空间位置不同而呈现不同厚度变化.因此分别计算悬挂长度3.0m-4.5m,走板厚度在0.1m、0.2m情况下,走板牵引力、走板与滑车的最大接触力、悬臂载荷、摆动幅度(向牵引侧摆动为正,向张力侧摆动为负)等参数的变化.计算结果如图10~图12所示.从图10~图12可知,走板通过双滑车过程中:1)随着悬挂长度的增加,滑车摆动幅度不断减小;2)随悬挂长度的增加,牵引力、最大接触力、滑车载荷产生波动,其变化与运动中的接触状态有一定关系;3)走板厚度对各变量影响较大,厚度0.2m时,牵引力、最大接触力、滑车载荷、摆动幅度与厚度0.1m相比均有较大增长.
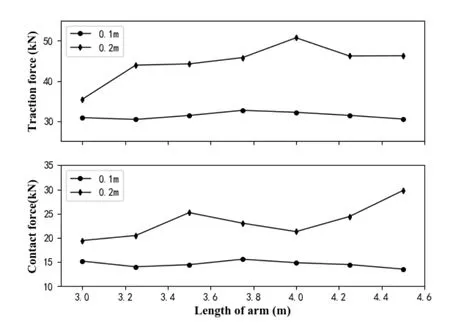
图10 牵引力、接触力随悬挂长度的变化曲线Fig.10 Curve of traction force and contact force with varying suspension length

图11 滑车1、2载荷随悬挂长度的变化曲线Fig.11 Curve of loads of pulley 1 and 2 with varying suspension length

图12 滑车摆动角最大幅值随悬挂长度的变化曲线Fig.12 Curve of maximum amplitude of pulley swing angle with varying suspension length
4 结论
本文建立了输电线路张力放线施工中牵引走板与双滑车结构的多体运动系统,提出了运动系统中钢丝绳、导线、牵引走板与双滑车间的接触判别方法,通过罚函数法得到牵引走板与滑车的接触力,结合有限质点法形成了牵引走板与双滑车的碰撞接触计算方法,为输电线路工程施工提供了技术支持,可用于大高差、大转角等地形条件下牵引走板对双滑车通过性的精细计算.通过模型简化,可直接退化得到牵引走板与单滑车的接触计算方法.
针对输电线路施工中的典型工况,进行了牵引走板与滑车的接触过程分析,总结了运动过程中接触状态、滑车载荷、滑车摆动角度的变化规律.针对工程中关注的悬挂长度、走板厚度等因素,进行多个工况的走板过双滑车过程计算,分析了牵引力、最大接触力、滑车载荷、摆动幅度等主要影响参数的变化.计算分析结果为牵引走板、放线滑车的设计与施工安装提供了参考依据,为张力放线施工安全提供保障.
