大闭环伺服控制随钻智能导向钻井方法
2021-11-15吴思源李守定陈冬李晓杜爱民张莹
吴思源, 李守定*, 陈冬, 李晓, 杜爱民, 张莹
1 中国科学院页岩气与地质工程重点实验室, 中国科学院地质与地球物理研究所, 北京 100029 2 行星与地球科学学院, 中国科学院大学, 北京 100049 3 中国科学院地球科学研究院, 北京 100029 4 中国科学院深地资源装备技术工程实验室, 中国科学院地质与地球物理研究所, 北京 100029 5 油气资源与探测国家重点实验室, 中国石油大学(北京), 北京 102249
0 引言
石油与天然气是国际战略资源,是国民经济发展的“血液”.随着国内外油气勘探开发力度进一步加大、钻井深度进一步加深,高效开发深层超深层油气资源是实现中国能源接替战略的首要任务,也是当前和未来油气勘探开发的重点和热点,但目前深层油气勘探开发仍面临系列挑战(刘光鼎,2005;贾承造和庞雄奇,2015).由于深井超深井地层情况复杂,井下复杂事故频发,建井周期长,钻完井成本高,降低了油气开发的技术性和经济性,智能化是解决以上问题的重要途径(底青云等,2021).在我国塔里木盆地、准噶尔盆地、四川盆地及柴达木盆地等地区,分布着众多的深井超深井,其勘探开发的进程受到勘探科技水平约束.因此,提出了一种大闭环伺服控制随钻智能导向钻井方法的架构设计,并开展了相关算法的初探.
地质导向技术与旋转导向技术是目前钻井领域自动化程度最高的钻井方法,可以有效提高油气钻遇率、钻进效率和井眼质量.该方法依赖高效的井地数据传输,通过专家远程分析上传数据判断钻井作业状态,可及时优化钻井决策.现有井地数据传输主要使用的方法是泥浆脉冲法(房军和苏义脑,2004),把钻柱内流动的钻井液作为传输介质,以编码压力脉冲或波的形式传输信息.然而,随着井深的增加,泥浆脉冲信号会不断衰减.因此,在深井超深井中,高效的数据传输面临着巨大的困难(Berro and Reich,2019).目前解决方法有以下两种:一种是采用有线钻杆等新型数据传输技术,保障在深井超深井条件下井地数据传输效率;另一种是采用大闭环伺服控制随钻智能导向钻井方法,利用人工智能(Artificial Intelligence,AI)方法提高钻井智能化水平,使其具有自主决策能力,以减少对数据传输和人类专家的依赖.要实现大闭环伺服控制随钻智能导向钻井系统,需要完成两个部分的无人化自主预测:一是利用随钻测井实时感知,并快速智能地对储层进行评价,为数据融合与闭环控制策略提供物理机制与参数基础;二是利用钻井工程参数对钻进过程中机械钻速进行预测和优化,为综合优快钻井提供可靠的数据保障.
纵向分辨率较高、连续性较好的地球物理测井参数在油藏描述中具有重要作用.在储层评价中,地球物理测井综合解释可解决两类问题:一类是通过地球物理测井曲线对地层进行划分,即地层中油气水层的判别、不同岩性的划分等分类问题;另一类是利用地球物理测井曲线求取地层的物性参数,如孔隙度、渗透率、饱和度等回归问题(雍世和和张超谟,1996).随着计算机技术的发展和地质行业数据量的爆炸式增长,人工智能技术在油气勘探开发领域中应用非常广泛.Wu和Nyland(1987)认为人工智能可以将地质因素纳入地层分层解释中,故采用了一个简单的迭代线性回归模型来识别界面,并用启发式算法过滤得到分层.刘争平和何永富(1995)应用人工神经网络中的BP神经网络(Back Propagation Neural Network)建立了地球物理测井参数与地层参数的关系,克服了传统地球物理测井解释方法中所遇到的高度复杂非线性建模困难的问题.王淑盛等(2004)改进了传统K近邻方法,提出了加权K近邻的方法利用地球物理测井数据进行岩性识别.近年来,随着深度学习的发展应用,在地球物理学领域中也引入了深度学习的方法.张吉昌等(2005)利用神经网络(Artificial Neural Network,ANN)结合模糊逻辑的方法,以地球物理测井资料为输入参数进行裂缝识别研究.许滔滔等(2020)利用LSTM循环神经网络,对大地电磁工频干扰进行有效压制,从而提高了数据处理质量.目前利用人工智能方法对储层进行评价的研究很多,但大多都是针对一个参数进行预测,并且预测准确率和泛化能力差异较大,没有形成统一的理论体系.所以本研究尝试了多种机器学习和深度学习算法,通过地球物理测井参数来预测储层物性参数,对比不同算法的优劣,为大闭环伺服控制随钻智能导向钻井系统中钻进环境感知模块提供参数基础.
钻井过程中大部分工作是破碎岩石,从而达到增加井深的目的.在安全、成功、高效的钻进目标下,提高机械钻速是目前超深井钻井的迫切需求(孙金声等,2009;陈平,2005).刘向君等(2005)结合地球物理测井资料和其他岩石物理参数提出了一个地层可钻性模型,可以在现场进行快速实时的可钻性预测.范翔宇等(2007)利用地震资料,运用数理统计方法模拟和优选出了地震层速度与机械钻速之间的定量计算模型.林元华等(2005)借鉴三牙轮钻头仿真理论,建立了冲击器动力学模型和机械钻速仿真模型,并预测出空气冲旋转钻井机械钻速.Bybee(2006)针对钻头、动力钻具以及底部钻具组合,提出了提高机械钻速的方法.本研究将机器学习算法引入到利用钻井工程参数预测机械钻速中,并获得了较好的结果,为大闭环伺服控制随钻智能导向钻井系统中智能决策模块提供了钻进参数优化的依据.
本文在提出大闭环伺服控制随钻智能导向钻井方法的基础上,采用机器学习和深度学习算法,对大闭环伺服控制随钻智能导向钻井系统架构的钻进环境感知模块、钻进参数智能决策模块开展详细研究,为深井超深井导向钻井提供了解决方案.既体现了该系统架构的可行性,也为系统内其他环节的实现提供了参考实例,符合自动化钻井朝着智能化钻井发展的历史趋势.
1 大闭环伺服控制随钻智能导向钻井方法架构
随着钻井朝着4500 m以深的深层超深层发展,复杂的地质条件对油气储层的刻画、井眼轨迹的设计及控制提出了更高的要求.深层超深层井型越来越复杂,泥浆信号传输速率受限,导致井下地质导向等数据很难实时传到井场,使井场钻井及远程控制滞后,增加了钻出储层风险和深层超深层钻井的成本.因此,对于深层超深层钻井,发展智能钻井方法,实现井下自主探测、自主决策、自主控制、自主钻进的智能控制钻井技术,是未来深层油气高效开发的必由之路(刘清友,2009).
大闭环伺服控制随钻智能导向钻井方法,基于地质模态、钻进策略和导向策略建立导向知识库,实现井下油气藏甜点的智能探测识别,自主智能钻进,这将是未来地下能源无人化智能开发的前沿技术.井下自主智能钻进须构建新的技术方法与实现路径,图1构建了一种大闭环伺服控制随钻智能导向钻井系统架构,将旋转导向、地质导向、随钻地震、电磁前探、随钻测量、信号传输、自动钻机等技术集成于一体,通过人工智能评价与决策,实现井下自主智能钻进.该系统架构分为钻进感知、智能决策与大闭环控制3个部分:

图1 大闭环伺服控制随钻智能导向钻井系统架构Fig.1 Global closed-loop servo control of intelligent-while-drilling steering system framework
(1)钻进感知模块.包括随钻测量、地质导向、电磁前探和随钻地震.随钻测量工具获取钻头定位信息,地质导向获取井周地层特性与参数,电磁前探和随钻地震探测获取钻头前方地层与结构信息,具体而言:①随钻测量工具,获取地磁方位、重力井斜等参数确定钻头的空间坐标与姿态,实现井轨迹实时计算.这些参数输入到大闭环控制模块中的数字闭环伺服控制器,作为钻井轨道控制目标,同时也作为智能决策模块中轨道钻进参数智能修正的初始参数.②地质导向通过方位声波电磁波成像、电阻率成像、方位声波成像、核磁共振与地层测试等技术获取井周地层的地球物理测井参数,感知井周地层特性.这些参数将传入智能决策模块的参数智能反演,为钻进决策提供依据.③电磁前探和随钻地震能对钻头前方地层进行超前探测,获得地层岩性、结构及地质力学相关特性.这些参数将传入智能决策模块进行参数智能反演,为自主确定钻进轨道提供依据.
(2)智能决策模块.包括预设轨道参数、预设钻进参数、参数智能反演和轨道钻进参数智能修正部分.该模块是智能钻进的“大脑”,依据智能感知系统获取的信息和先验知识输入AI预测模型进行决策判断,并根据预测结果对轨道和钻进策略进行智能修正,及时调整钻进方向和速度.决策方法主要包括有限状态机模型、强化学习、决策树模型、神经网络和贝叶斯网络等.①预设轨道参数,是钻井初始轨道参数序列.在区块井场地质、地球物理与前期钻井资料形成的三维地质模型基础上,形成的钻井设计预设轨道参数,是参数智能修正的基础轨道参数.②预设钻进参数,是钻井的初始钻进工程参数.在轨道参数的基础上,结合地层特性与结构参数,形成的钻井设计预设钻进机械与水力参数,是参数智能修正的基础钻进参数.③参数智能反演,根据钻进感知的探边与前探数据,通过人工智能算法模型反演井周与钻头前方地层岩性与物性参数,实时分辨油、气、水层和前方地层的结构特性,建立储层的地质模型并对钻头前方的地层特性和油气甜点进行评价.④轨道钻进参数智能修正.在地质模型的基础上,利用地层参数智能反演结果生成新的预设钻井轨道参数和预设钻进参数,然后输入AI模型对轨道钻进参数进行智能修正,使钻头钻进轨道不脱离储层,有效地穿过储层甜点,更安全快速地完成钻进任务.
(3)大闭环伺服控制模块.包括数字闭环伺服控制器,旋转导向、钻头、自动钻机等部分,是智能钻井的执行模块.数字闭环伺服控制器,是钻进策略与轨道执行的“中枢”,它根据智能决策模块中修正后的轨道和钻进参数,结合井斜和方位计算偏执力,将偏执力矢量信号传输到旋转导向执行转向,使旋转导向前方的钻头实现偏转.同时,数字闭环伺服控制器还将钻进参数组模式信号通过泥浆脉冲传输到井场自动钻机,自动钻机根据接收到的钻进参数组模式信号,调整钻压、转速、泵压和泵量等钻进参数,合理调整钻头的钻进速度.随钻测量工具和地质导向在钻头钻进过程中,将记录的井斜、方位和机械钻速、钻头位置等参数反馈到数字闭环伺服控制器,由此实现了钻头钻进与转向两个钻进指标的大闭环伺服控制.
图2为大闭环伺服控制随钻智能导向钻井系统软硬件智能测控关系,钻头后方从前到后分别为旋转导向、地质导向、随钻测量工具,地质导向实现井周和钻头前方地层的地球物理特性探测,获得钻头井周地层情况;这些井周与钻头前方的位置和特性参数,作为轨迹和钻进参数智能修正的输入条件,经过轨迹与钻进参数修正,使钻头钻进轨道不脱离储层;修正后的轨道和钻进参数输入到闭环控制器,闭环控制器将这些参数作为伺服目标,经过伺服控制计算,向旋转导向发送偏执力信号,旋转导向执行钻头转向,通过泥浆脉冲向井场钻机发送钻进模式信号,钻机按照预定好的钻进模式设定钻进工程与水力参数进行钻进,地质导向和随钻测量中的定位模块将钻头位置返回到数字闭环伺服控制器,伺服控制器根据钻头位置反馈进行误差计算,调整新的偏执力与钻进模态分别发送到旋转导向和井场钻机,独立完成钻头钻进与转向的闭环伺服测控.上述大闭环伺服控制随钻智能导向钻井系统井下工具组合与信号传输关系见图3.

图2 大闭环伺服控制随钻智能导向钻井系统软硬件智能测控关系Fig.2 Measurement and control technique between software and hardware of global closed-loop servo control of intelligent-while-drilling steering system
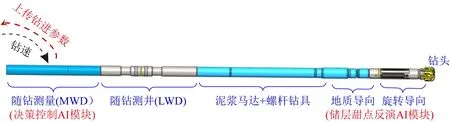
图3 大闭环伺服控制随钻智能导向钻井系统井下工具组合与信号传输Fig.3 Downhole tool combination and signal transmission of global closed-loop servo control of intelligent-while-drilling steering system
2 钻进环境感知智能反演算法
钻进感知算法决定了感知信息的利用程度与利用效率,是大闭环伺服控制随钻智能导向钻井系统中获取地层信息的重要模块.利用地球物理测井技术获取地层地球物理测井参数,建立适当的算法关系,将其转化为如岩性、孔隙度、渗透率、含水饱和度、泥质含量等地质信息,根据这些信息能科学地评价钻遇地层并智能优化预设的钻进参数,也能为井眼轨道智能规划和导钻决策控制提供数据支撑.井地信息双向传输能力弱和井下闭环控制算法不足,是制约深井超深井智能钻井系统钻进感知能力的主要因素.尝试不同的机器学习算法构建地层特性预测模型,进行地球物理测井参数反演,为轨道钻进参数智能修正提供依据.
首先进行数据准备.在综合分析中国华南多源多尺度地质和地球物理数据得到的理论背景下(Di et al., 2021),收集地球物理测井参数和岩性、物性等参数组成数据集,数据来源于已完成勘探开发的区块且该数据集所在区块的录井和地球物理测井等地质资料较为齐全,保证了数据的有效性和正确性.根据国内外各大石油公司目前随钻测井仪器的技术水平,选取自然伽马GR、声波AC、密度DEN、中子CNL、电阻率RT等5个地球物理测井参数作为输入.选取通过地球物理测井解释后得到的岩性、孔隙度、渗透率、饱和度、泥质含量等物性参数作为输出,输出参数按数据类型分为:属于分类问题的岩性识别和属于回归问题的孔隙度、渗透率、饱和度、泥质含量预测等.
由于数据集来自西部地区某区块的不同井次,地球物理测井参数和解释参数的侧重点有所差异,故需要对数据集进行基础的数据清洗,即对一些缺失数据、异常点和分类数据进行处理.针对缺失数据:若是局部缺失,主要通过邻点插值的方法补全缺失点数据,若是缺失层段较长,则删除对应深度所有参数值以保证数据集的真实性.地层性质随着地层深度的增加变得越来越复杂,时常有异常点出现.根据地质录井资料、钻井报告等查询该深度在勘探过程中是否出现过事故,判断该异常点是否能真实反映地层性质,对该异常点进行合理取舍.
地层发育的连续性使得储层岩性分布具有渐变性,因此在试验中岩性的划分非常精细.由于分类类别过多会使支持向量机的训练和测试计算量大大提高,故选择粉砂质泥岩、细砂岩、泥岩、泥质粉砂岩4类岩性作为标签进行训练,分别记为1、2、3、4,方便后续数据处理与分析.
随钻测井工具获得的参数较多,但有些参数相关性不大,由于数据集维数较大时会增加分类器的计算量,应该去掉这部分特征,以增加分析任务的有效性,从而提高模型精度、减少运行时间. 在建立物性参数与地球物理测井参数之间关系矩阵时,引入信息熵(Kolter and Maloof,2004)的概念,通过计算得到特征属性的重要程度.增强热图是一种能很好反映各特征重要性程度以及特征之间相关性的表现方法,可以从大量无序的地球物理测井参数找出与预测值相关性较高的特征.以孔隙度为例,引入增强热图直观表示各地球物理测井参数与孔隙度之间的关系,两者相关性越大图中的数值越趋近于1,相关性越低数值越趋近于0.具体实现流程如下:首先设置关系矩阵的框架格式,并调用某区块超深井数据集中的5个地球物理测井参数列以及孔隙度列. 引入sns.heatmap函数,对函数内的参数进行设置,即可实现用颜色编码的矩阵来绘制矩形数据-热力图. 最后得到孔隙度与地球物理测井参数之间的关系矩阵,如图4所示,与孔隙度相关性较高的地球物理测井曲线有密度、声波、中子,符合地球物理测井原理.

图4 孔隙度与地球物理测井参数之间的关系矩阵Fig.4 The relationship matrix between porosity and logging parameters
2.1 岩性识别智能算法
岩性识别是储层评价和油藏描述的重要研究内容,同时也是钻进感知需要获取的基础参数.在划分层位、地层对比时,仅从岩屑录井来判断岩性分类往往是不够的.地球物理测井曲线中包含丰富的地层信息,不同地球物理测井曲线对岩性和地层的区分程度不同.其中,自然伽马、自然电位、岩石体积密度等常规地球物理测井曲线常作为岩性分层的依据(马海等,2009).地球物理测井曲线是判断、解释岩性剖面的主要依据,但是由于地下储层非均质性很高,地球物理测井参数与岩性的对应关系大多是非线性关系.目前使用较多的传统岩性识别方法,如:交会图法、地质统计学方法,其准确率和效率主要取决于人的经验,可靠性无法得到保证.
支持向量机算法被广泛应用于岩性识别中,但得到的识别率和泛化能力差异较大.通过岩心取样和录井剖面获得的岩性是较为可靠的,但由于花费较大,往往只在储层段或具有研究价值的目的层段取心,数据量相对较小.所以相对于孔隙度、渗透率、饱和度等物性参数的预测回归任务,岩性分类属于小样本数据学习.由于支持向量机更适合对非线性小样本数据进行学习且具有优秀的泛化性能,故采用该算法对岩性进行分类.通过学习分类寻找并建立不同岩性切分的超平面,再根据现场随钻测井测得的地球物理测井资料自动划分钻遇地层的岩性.
支持向量机在1995年被正式提出(Cortes and Vapnik,1995),是一种非常强大和多功能的基于线性判别函数的有监督模型.其思想如下:能将训练样本划分开的超平面有很多,但只有位于两类训练样本正中心的超平面使得正负例之间的间隔最大化,在这个超平面上的数据称为支持向量(周志华,2016).
支持向量机算法在本质上与地球物理测井解释的思想一致,寻找确定不同岩性数据的边界,即通过学习分类寻找并建立将不同岩性切分的超平面,再根据现场随钻测井测得的地球物理测井资料自动划分钻遇地层的岩性.针对岩性样本数量较少、分类标签复杂度较低的情况,选择一对一的多类分类支持向量机(Multi-class Support Vector Machines,MSVM)来解决此分类问题.决策采用投票法,每个分类器都对类别进行判断并投票,未知样本的类别输出是得票数最多的那一类别(Krepel,1999;薛宁静,2011).二分类支持向量机可以通过最小二乘法来寻找决策超平面(Gestel et al., 2004;Sengur,2009;Adankon and Cheriet,2009).二分类支持向量机的核函数选择常用的是高斯径向基核函数,核参数σ二进间隔取值范围为2-10~210.通过核函数,可将低维空间中非线性的数据映射为高维或无限维空间中近似线性关系的数据,然后进行求解.
收集了某区块的地球物理测井数据共368组,在同一深度具有相对应的岩性数据,在判别岩性时可以相互验证、互为依据.将数据集按4∶1的比例分为训练集、测试集,为模型的建立及测试提供数据基础.根据从随钻测井常测的参数中选出自然伽马、电阻率、密度、声波、中子等5条地球物理测井曲线,对其进行归一化后作为岩性预测的输入.然后,引入支持向量机模型来构建预测模型. 模型的参数设置如下:支持向量机惩罚因子C=1.0和核函数参数Gamma=28.594,核函数选择的是RBF kernel,分类策略是ovo(one v one),即类别两两之间进行划分,用二分类方法模拟多分类的结果.岩性识别结果见图5,左图是通过录井资料实测的真实岩性剖面,右图是此次试验中构建的支持向量机模型预测的岩性剖面. 分析岩性分类结果可知,砂泥岩互层的地层主要靠泥质含量进行区分.结果显示,该模型对细砂岩和泥岩的识别能力较强,而对于粉砂质泥岩和泥质粉砂岩或其互层的地层识别能力相对较弱.模型在训练集中得到了87.34%的准确率,在测试集上得到了86.08%的准确率.

图5 支持向量机算法预测岩性对比剖面图Fig.5 Comparison of lithology section predicted by SVM algorithm
2.2 储层物性智能反演算法
孔隙度、渗透率、饱和度和泥质含量是评价储集层油气储集能力的基本物性参数,受埋藏深度、储层构造、沉积环境、成岩作用等多种地质因素的影响,这些参数与地球物理测井参数之间是典型的多参数非线性映射关系.充分利用多种地球物理测井参数对孔隙度、渗透率、饱和度参数进行综合预测,对勘探开发具有十分重要的意义.以孔隙度为例,介绍利用地球物理测井数据构建回归模型预测孔隙度,并推广到其他储层物性参数的预测方法.
2.2.1 随机森林
随机森林(Random Forest)是一种统计学习理论,以决策树为基学习器,通过对每个基学习器的预测值进行投票或者求平均值得出最终预测结果的一种方法.作为一种机器学习理论,随机森林是集成学习的一个扩展变体(Breiman,1996,2001).与集成学习中只通过样本扰动的方法实现基学习器的“多样性”(通过对初始训练集采样)不同,随机森林中基学习器的多样性除了来自样本扰动,还来自属性扰动,使得个体学习器之间的差异程度增加,从而使最终集成的模型泛化性进一步提高.随机森林算法逻辑简单、计算开销低,在许多任务实现中表现出强大的性能.
收集到某区块的处理后数据3642组,按3∶1的比例将数据集分为训练集和测试集,用于模型的训练和测试.通过特征选择,选择输入样本特征与岩性识别相同,即对孔隙度敏感的密度、中子、声波,反映岩层泥质含量的自然伽马,以及包含丰富的岩层渗透率和饱和度信息的电阻率曲线(刘争平和何永富,1995).通过以下步骤实现孔隙度预测:向建立好的随机森林中输入一个新样本(训练集);随机森林中的每棵决策树都可以独立地做出判断;将所有回归决策树输出值的平均值作为预测值进行输出;将训练完成的模型应用在测试集上验证其性能,并调整参数.实际试验调用RandomForestRegressor函数构建模型,函数内部的参数设置为:nestimators=4,criterion=‘mse’,randomstate=3,njobs=-1. 试验结果显示,应用随机森林算法进行孔隙度预测,在测试集上得到了97.39%的准确率.同样的,应用随机森林算法对渗透率、饱和度和泥质含量进行预测,得到的准确率分别是93.22%、91.05%、96.53%,真实值与预测值的对比见图6.基于随机森林算法的孔隙度、渗透率和饱和度的预测结果与真实值具有良好的相关性,表明了随机森林算法预测孔隙度、渗透率和饱和度的有效性和实用性.在预测精度得到保证的情况下,应用随机森林算法预测储层参数的时间大大缩短,节省了时间成本.
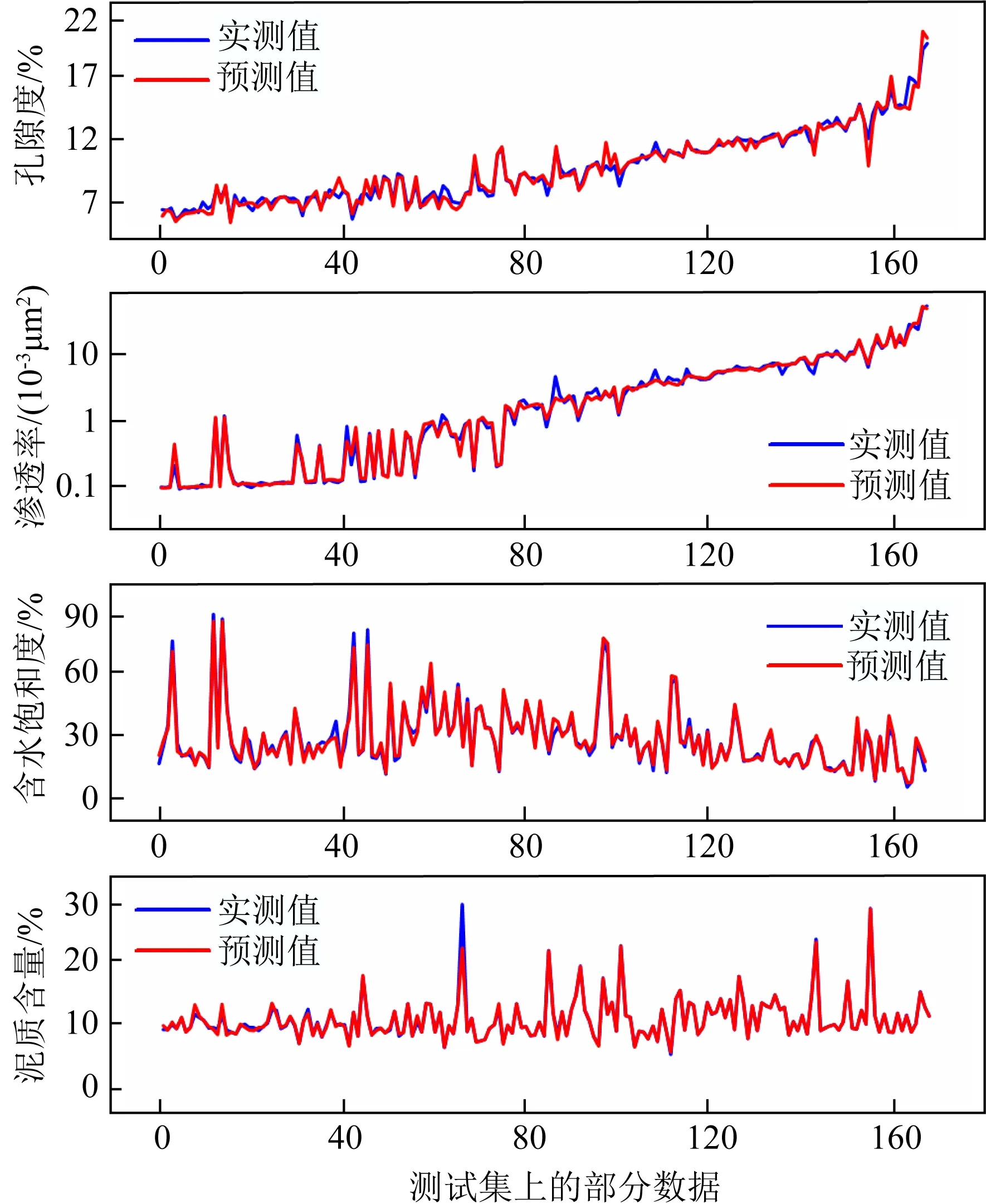
图6 储层参数预测结果对比图Fig.6 Comparison of reservoir parameters prediction results
2.2.2 LSTM循环神经网络
传统的机器学习算法在很多储层评价和表征的实例中都能得到很好的结果,但由于训练数据量较小和传统机器学习算法自身的局限性,导致了很多模型泛化能力不足,即训练好的模型不能应用于更广泛的地区.而这时拥有着更强泛化能力的深度学习算法就可以取得更好的效果.许多专家学者采用深度学习的方法对地球物理测井数据进行分析预测.针对地球物理测井数据量较大的问题,循环神经网络暴露了梯度消失和梯度爆炸的问题,导致无法利用时间较为靠前的数据,Hochreiter和Schmidhuber(1997)提出了长短期记忆LSTM循环神经网络.Zhang等(2018a)将LSTM方法运用于地球物理测井曲线的补全和人工测井的生成,有利于更好的认识地层并改进钻井策略,从而达到油气开发降本增效的目的.安鹏等(2019)运用LSTM的方法,利用地球物理测井参数对储层的物性参数进行预测.Zhang(2018b)运用LSTM的方法预测地下水位深度,获得了比传统前馈神经网络更好的R2得分.
针对孔隙度反演,在Keras框架下实现,Keras是基于Theano和TensorFlow等底层框架实现的高层框架,该框架提供了许多用于快速训练和测试网络的高级接口. 本次试验构建了一个包含6个隐层的深度神经网络模型,数据通过MinMaxScaler的方式进行了预处理,输入参数为DEN、CNL、AC、GR、RT. 神经网络优化算法使用Adagrad算法,激励函数使用ReLU函数,最后使用了Softmax层进行输出. 试验中构建的LSTM循环神经网络整体结构框架见图7.训练模型除了包含循环神经网络外部结构基本的循环外,LSTM还存在内部的“单元”循环(自循环).具体地,LSTM和普通的循环网络相似之处在于每个单元都具有相同的输入和输出,但增加了控制信息流动的门控单元系统和更多的参数设置.
图7框架中最重要的组成部分是状态单元ct,保证信息不变地流过整个RNNs.第一个自环的权重(或相关联的时间常数)由遗忘门(Forget Gate)ft控制是否丢弃ct-1中的信息,是线性自环.具体操作为sigmoid单元将权重设置为0和1之间的值,控制细胞状态ct-1的信息.因此LSTM细胞内部状态更新,其中有一个条件的自环权重ft:
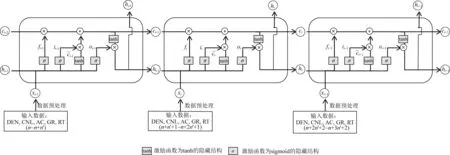
图7 LSTM循环神经网络框架Fig.7 LSTM recurrent neural network framework
ft=σ(ωifxt+bif+ωhfht-1+bhf).
(1)

it=σ(ωiixt+bii+ωhiht-1+bhi),
(2)
(3)
(4)
输出门(Output Gate)ot控制着LSTM细胞信息的输出ht(使用Sigmoid单元作为门控),ht为当前隐藏层向量,包含所有LSTM细胞信息的输出,xt为当前输入向量:
ot=σ(ωioxt+bio+ωhoht-1+bho),
(5)
ht=ot⊙tanh(ct).
(6)
数据共有14666组,选择前10000组数据进行LSTM模型训练,利用后4666组数据进行测试,在训练集上得到的结果和实际孔隙度的对比见图8.可以明显看出预测的孔隙度和实际的孔隙度十分接近,在测试集上预测结果的准确率为95.4%,均方根误差RMSE=0.0261,RMSE是方差的算术平方根,能反映一个数据集的离散程度.与随机森林算法相比,LSTM循环神经网络算法在构建孔隙度预测模型时的数据量远大于随机森林,最终模型的泛化能力也高于随机森林算法,能应用于更多区块的油藏评价.所以,随着大闭环伺服控制随钻智能导向钻井系统的不断完善和发展,油气田勘探开发获取的数据量暴增,深度学习算法在预测能力和泛化能力上比机器学习更有优势.
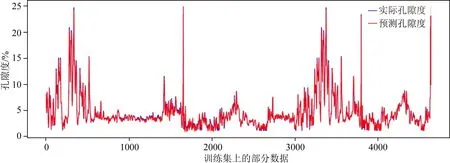
图8 基于LSTM的孔隙度预测结果对比图Fig.8 Comparison of porosity prediction results by LSTM
3 钻进参数智能决策算法
智能决策的主要任务是根据感知到的地层信息进行全局钻井参数优化和钻井设计,并根据钻头实时的定位信息进行实时钻进参数智能优化和轨道参数智能修正,是大闭环伺服控制随钻智能导向钻井系统的决策中心.钻井参数包括机械破岩参数与水力参数,通过AI模型确定最佳钻井参数组合,实现优质高效钻进.轨道规划参数需要根据预设轨道参数与随钻测量数据,通过AI模型进行智能修正,使轨道不偏离储层,并穿越更多的地质甜点.
3.1 钻进参数智能决策
国内深井超深井钻井技术起步较晚,但深井数量和机械钻速都在不断提高(汪海阁和郑新权,2005).机械钻速预测的发展大体经历了三个阶段(林元华等,2004):(1)收集现场的钻井工程数据,通过统计学的方法构建机械钻速方程;(2)考虑钻头结构、地层力学性质和钻井工程参数等因素的经验公式;(3)在实验室数据的基础上,建立与钻井过程有关的钻井仿真数值模型.随着计算机技术的发展,机械钻速预测的准确性和速度有了显著提高.
本文提出了基于随机森林的机械钻速预测方法,根据机械钻速预测模型确定最优钻进工程与水力参数.首先,收集钻进工程数据进行分析和预测,大部分钻进深度超过6500 m,属于深井、超深井范畴.随后,对机械钻速数据进行预处理,使数据呈正态分布趋势.针对同一组钻井工程参数,应用不同的机器学习方法构建模型并进行机械钻速预测.最后,验证模型的准确率.不同机器学习算法在训练集和测试集上获得的准确率见表1.由表1可知,随机森林构建的模型与其他机器学习算法相比,具有较高的预测准确率.高效、准确地预测出机械钻速,是实现科学化、智能化钻井的重要工作之一(Li et al., 2019).通过钻进参数预测机械钻速,不仅可以为现场机械钻速的控制提供参考,还可以为轨道钻进参数智能修正提供准确的输入,以保证闭环控制的完成.

表1 不同机器学习方法的机械钻速预测结果Table 1 Rate of penetration prediction results by different machine learning methods
3.2 轨道智能修正方法
自动导向钻井技术基本已实现,但钻井技术的发展并未真正意义上进入智能化钻井阶段.因为在轨道规划阶段还有人工参与,未实现钻井轨道智能修正与轨迹闭环控制.钻井轨道的设计主要以地质、采油部门提供的地质分层情况与目标点或目标井段的数据为基础,通过数学方法计算出满足设计要求的井眼轨道(刘修善,2006).以上轨道设计方法本质上都在使用数值迭代法求解,难以满足复杂油气藏井眼轨道设计与实时优化钻井轨道的要求.理论研究的缺失使得井轨道设计技术向智能方向发展的进程缓慢,且严重阻碍了自动化钻井技术的发展以及大闭环伺服控制随钻智能导向钻井方法的实现.
Wang等(2019)提出了一种基于计算机视觉的油气储层内井轨道智能规划算法.这一井轨道智能规划方法能够在获取实际地层信息的前提下,利用计算机自主进行井轨道规划,见图9.图中红色部分为油气分布图像,线条为计算机根据油气分布规律自主规划的井轨道.这种井轨道规划的思路有益于解决具有较大不确定性地下复杂工况的井轨道实时规划问题.
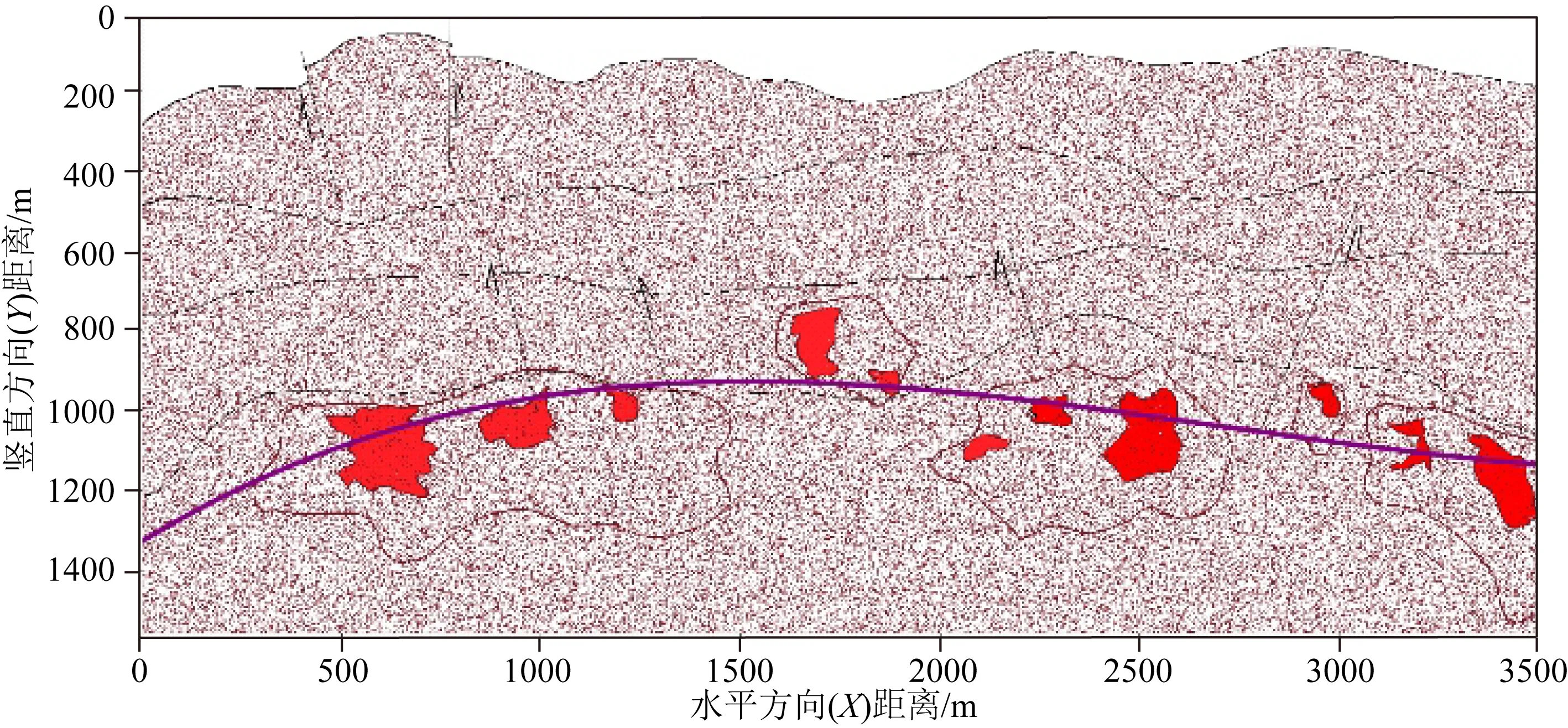
图9 井轨道智能规划算法示意图(Wang et al.,2019)Fig.9 Schematic diagram of intelligent well track planning algorithm (Wang et al., 2019)
4 结论
大闭环伺服控制随钻智能导向钻井方法的提出,旨在借鉴无人驾驶汽车的理论架构,提出井下自主智能钻井的方法,解决深层超深层钻井“看得清、找得准、打得快”的系统架构问题.该方法的实现将大幅降低钻井成本,提高钻井速度,减少钻井事故的发生,实现井眼轨迹的精确控制,提高深层超深层钻井效率.此外,基于大闭环伺服控制随钻智能导向钻井方法与技术架构,在对大量地球物理测井和钻井工程数据分析的基础上,利用机器学习和深度学习的方法建立了钻进感知智能反演算法和钻进参数智能决策算法,快速并准确地预测储层物性参数、机械钻速和识别岩性.具体结论如下:
(1)大闭环伺服控制随钻智能导向钻井系统包括钻进感知、智能决策与大闭环控制3个部分.钻进感知部分通过随钻测井数据获取钻头定位信息、井周地层及钻头前方特性与参数;智能决策部分依据钻进感知部分获取的信息通过AI决策模型修正轨道和钻进策略;大闭环控制部分根据智能决策指令执行调整钻进方向和速度.该系统的实施能有效地克服因井地传输慢而导致决策不及时的问题,提高钻进的安全性、及时性、经济性.
(2)基于支持向量机算法利用地球物理测井数据进行岩性智能识别,达到了86.08%的准确率;利用地球物理测井数据对孔隙度、渗透率、饱和度和泥质含量进行评价,随机森林算法具有很好的适用性,均达到了90%以上的准确率;进一步地,用深度学习的方法中对序列化数据具有较好的预测能力的LSTM循环神经网络对孔隙度进行预测,达到了95.4%的准确率.不仅可以为大闭环伺服控制随钻智能导向钻井系统提供控制参数,还可以应用于区块乃至盆地级别的储层评估及分析,为油藏评价提供可靠的储层参数.
(3)利用钻井工程参数对机械钻速进行预测与优化,随机森林算法获得了76%的准确率,相较于其他算法准确率更高,为大闭环伺服控制随钻智能导向钻井系统提供决策参数.
致谢文章撰写过程中得到中国科学院地质与地球物理研究所张文秀博士的帮助和修改,在此表示诚挚的感谢.
