三维建模道路地形三维可视化分析
2021-11-15沈蕴红
徐 亮,沈蕴红
(中国市政工程西南设计研究总院有限公司,四川 成都 610000)
0 引 言
在基于GIS的高精度三维地形模型上进行道路规划设计与施工设计,是当前道路基建规划设计中的重要技术改革方向。道路BIM工程信息综合管理系统中的基础数据质量,直接影响到后续的施工接续调度、工程量分析、工程造价分析、成本控制、劳动组织、附属设施规划设计等管理环节。而基于高精度三维地形模型的基础数据的获取、治理、建模方案,是向BIM提供更高精度数据的前提条件。
使用无人机携带高精度倾斜摄影设备对道路规划区进行低空航拍扫描,在机载高精度GPS设备提供的参考点数据支持下,与GIS高精度平面地图进行数据融合,使用Smart3D软件工具包获取规划区的DEM三维模型。部分工程使用倾斜摄影与激光点云成像技术相结合,实现对数据精度的更大提升。
基于无人机低空航拍技术的DEM三维模型的数据治理,即对误差数据进行充分平差的计算方式,是其三维可视化成果精度的有效保障。因为当前使用全站仪进行水平坐标和垂直高程定位的方式误差可以做到±50mm以内,所以该模式在无人机机载GPS移动定位信号精度仅能达到米级水平的前提下,实现对地表测量点误差小于±50mm的平差计算,是本文研究的重点。
1 道路规划无人机航拍的数据来源
基于无人机航拍的数据,一般来自3个方向,一是无人机机载GPS的实时数据,在航拍系统的设计中,无人机每次倾斜摄影拍照或者获取激光点云数据时,均会在数据头部标记拍照时的GPS实时定位结果;二是倾斜摄影的图像点阵数据;三是激光点云点阵数据。另外,在进行后期数据融合时,所有相关数据需要与GIS平面地理信息数据进行融合,见图1。

图1 道路规划测量的数据流图
图1中,道路规划测量的数据来源,主要为无人机数据和GIS数据两个核心来源,其中GIS数据的精度一般为±50mm,倾斜摄影和激光点云数据本身的精度远小于±50mm,但机载GPS在高速移动模式下的定位精度,一般大于±1000mm。此时,综合平差方案将DEM模型的精度控制在±50mm以内。DEM模型注入到道路工程BIM管理信息系统中,用于后续的道路工程管理。
所以,本文研究重点在于研究在机载GPS定位数据、倾斜摄影数据、激光点云数据、GIS地理信息数据的基础上,实现对综合平差数据精度的有效控制。
2 传统平差算法及其局限性
传统平差算法中,使用倾斜摄影的照片数据集与机载GPS定位数据集相结合,形成倾斜摄影定位数据,使用激光点云数据集与机载GPS定位数据集相结合,形成激光点云定位数据,将上述两个数据初步平差结果与GIS地球地理信息数据集相结合,形成倾斜摄影定位数据的平差结果和激光点云定位数据的平差结果,进而在两个平差结果的基础上,再次结合GIS地球地理信息数据集,形成最终的综合平差结果,见图2。
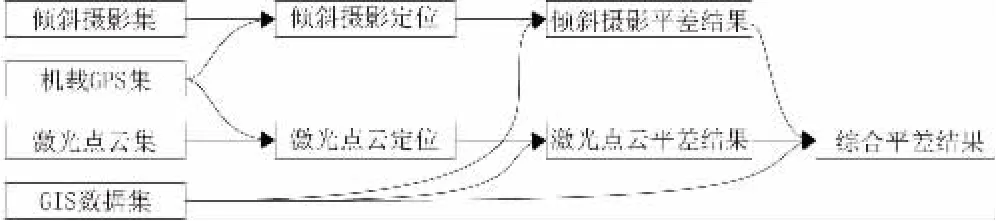
图2 传统平差算法数据流图
图2中,第一步形成倾斜摄影定位和激光点云定位的过程,可以利用Smart3D工业软件工具包实现,该过程为一个全封装过程。经过相关文献的数据分析研究,该过程的数据平差算法已经拥有一定的领先性,本文研究也同样采用了Smart3D的工业软件工具包,所以对其详细平差过程不再进行深入讨论。而在整合GIS地球地理信息数据集的过程中,则需要进行深入研究。
其中,不论是倾斜摄影定位、激光点云定位、GIS数据坐标等,其数据本质是基于水平坐标系的(X,Y)坐标和基于高程系统的H坐标,即对特定标志点,在上述数据流中形成一个坐标系统M,见式(1):
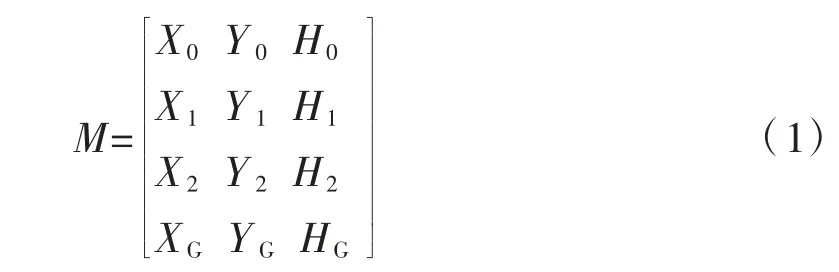
Smart3D分析后的DEM结果和激光点云经Smart3D分析后的DEM结果;为该标志点在GIS地球地理信息数据库中的标记坐标;
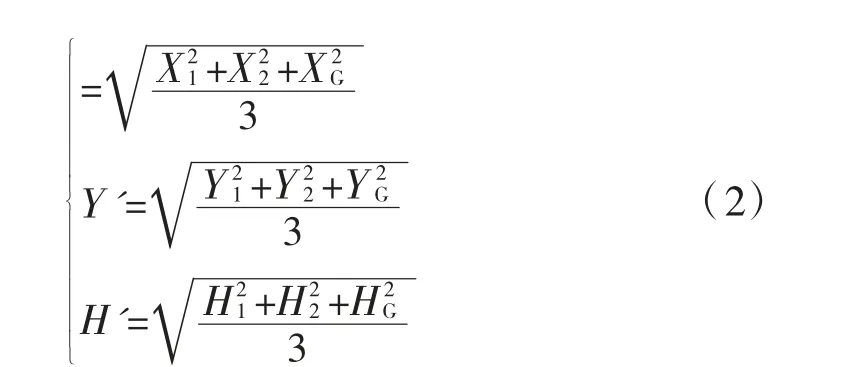
经过式(2)的两次平差,即使用GIS地球地理信息数据分别对倾斜摄影DEM数据和激光点云DEM数据进行两次平差,再将两次平差结果与GIS地球地理信息数据再进行一次平差,最终得出的平差结果,距离的直线距离,应远小于理论值的±50mm级别,基本可以保证实现亚厘米级的平差计算。
3 基于机器学习的平差技术革新
3.1 传统算法的局限性
3.2 神经网络的左右互搏算法
将倾斜摄影定位DEM结果和激光点云定位DEM结果,结合GIS地球地理信息数据进行基于机器学习多列神经网络的结果,且每次调整系数后,判断一列理论直线状态坐标的R2值,使其无限趋向于1.000,那么,机器学习过程会得到持续优化。其数据流见图3。
图3中,选择一列神经网络训练用数据,该数据通过计算机直接模拟获得,并非为实测数据,使其更接近直线分布的规律。通过针对X,Y,H三列输出结果的神经元网络系统,对该列数据进行平差计算,最终得到一列平差结果数据,然后使用SPSS二次开发接口实现的线性回归和R2值输出,比较数据的R2值差异,选择R2值最小的神经网络待回归参数的深度迭代回归方案,进而生成新方案进行二次比较,当该循环过程将R2值迭代到0.999990以上时,认为神经元网络的优化结果达到要求并将该方案保留。

图3 神经网络的左右互搏算法数据流图
此时,神经网络的多列架构见图4。
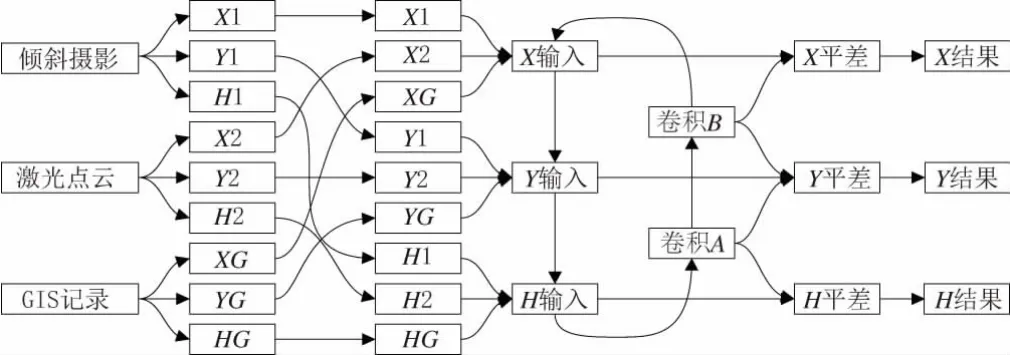
图4 多列神经网络内部数据流图
图4中,来自倾斜摄影的DEM数据、激光点云的DEM数据、GIS的记录数据,进行拆分重组后,形成针对X,Y,H三个输出需求的输入数据集,分别为三组数据的X数据、Y数据和H数据,三列数据分别输入后,使用2个卷积模块,实现对数据的卷积整合,再将卷积数据整合到三列神经网络的平差模块中。最终输出经过多列神经网络平差计算的X结果、Y结果和H结果。
其中,X输入、Y输入、H输入、卷积A、卷积B模块,其统计学意义在于实现数据的充分融合,所以可以使用多项式函数进行模块中的隐藏层节点设计,且因为X输入、Y输入、H输入三个模块的输入项为4项,卷积A、卷积B的输入项为1项,所有卷积输入模块的输出项均为1项,且其统计学意义仅为数据融合,所以其隐藏层结构按照最简设计,第1层设计5个节点,第2层设计3个节点,然后直接进入输出层。其节点函数可以写做式(3):

式中:Xi为第i个输入数据;Y为节点输出数据;j为多项式阶数;Aj为第j阶多项式的待回归变量;当j=0时
在三列多列神经网络的平差模块中,即X平差、Y平差、H平差,分别为2个、3个、2个输入项,均提供1个输出项,输出项直接为平差后的带量纲结果。该过程的统计学意义为发现数据的深度统计学规律,所以,如果同样采用2层隐藏层设计,那么第1层应为充分发现数据的统计学非线性分布规律,所以仍需要采用公式(3)的多项式回归函数进行节点设计,第2层应对数据细节进行充分整理,应采用对数函数进行节点管理。且为了加深数据特征的逼近能力,节点数量应适当加大,所以,隐藏层第1层设计11个节点,第2层设计17个节点。其第2层的对数回归函数的基函数如式(4):

式中:Xi为第i个输入数据;Y为节点输出数据;A,B为待回归变量。
4 数据的仿真验证
使用激光放线法,在地表构建长度为5km的5条直线分布点序列,使用无人机挂载激光点云设备、倾斜摄影设备、机载GPS设备进行基于多次通场法的试验性测量,且将该坐标点在GIS地球地理信息数据库中进行标注,获得GIS地球地理信息数据集。对该方案使用直接激光点云数据、直接倾斜摄影数据、系统内置平差法整合上述三组信息获得的传统方案平差数据,以及基于上述机器学习算法的神经网络平差数据进行比较,可以得到表1。

表1 仿真实测数据的R2值比较结果对比表
表1中,5条基于激光放线法实现的长度5km±200m的测线中,高程差为154~357m,符合一般公路规划地形的特征。在实测四种方式获得的数据R2值时,发现激光点云的直接DEM数据R2>0.998,倾斜摄影的直接DEM数据R2>0.997,传统平差算法的R2>0.999,而采用本文优化的神经网络平差算法的结果值R2>0.99999。可以认定,本文优化后的神经网络平差算法将传统平差算法结果优化了至少2个数量级,如果传统平差算法的平差结果误差达到±50mm级别,那么使用本文优化的神经网络平差算法的实际测量结果,可以实现亚毫米级的平差计算。
但是,上述仿真实证方案为基于直线测线的理想测量过程,如果验证本文优化算法对实际公路规划设计中的应用效果,需要在CAE平台上,基于GIS全息三维地图,实现更优化的可视化结果展示,即通过在CAE+GIS的仿真平台上进行测量仿真,以获得更高精度的全息三维地图。因为在GIS系统中直接构建三维地图的方式可以获得完全已知的坐标,所以可以在仿真计算中求取实际工程量的可视化量取值差异,见表2。
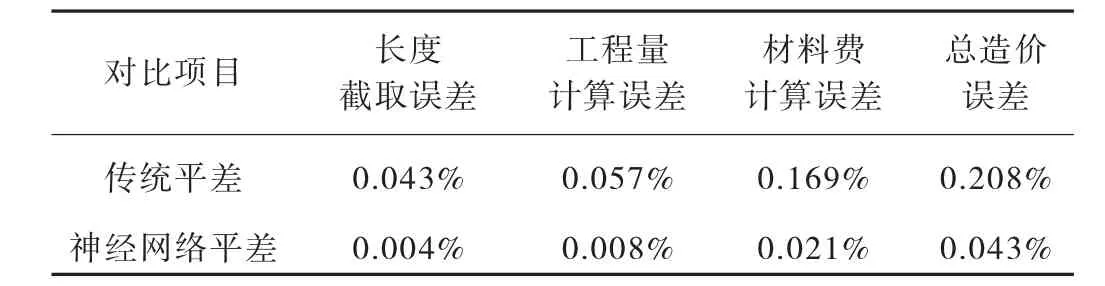
表2 基于CAE+GIS仿真评价结果对比表
表2中,对比传统平差算法获得的三维DEM可视化模型和基于本文优化的神经网络平差获得的三维DEM模型,在可视化结果中的长度截取误差、以及基于上述长度截取过程获得的工程量计算误差、材料费计算误差、工程总造价误差等方面,本文优化算法分别将数据精度提升90.7%、86.0%、87.6%、79.3%。该结果与上述理想状态下数据提升2个数量级的结果基本吻合。
5 结语
通过现状及问题分析,发现当前道路规划设计过程中,工程测量精度仍有较大提升空间。在当前基于无人机航测遥感技术的三维DEM可视化硬件设备没有升级的前提下,通过充分优化基于多种测量模式获得数据的平差过程,在传统的三角法平差算法的基础上,引入神经网络和机器学习技术,使用带深度卷积的多列神经网络辅助平差计算,可以将当前平差计算的数据水平提升2个数量级,获得更高精度的测量结果。虽然该方案尚未被工程测量相关国家标准接纳和支持,但单纯从数据角度分析,该方案在公路规划设计领域的工程测量中表现出一定的积极意义,具有一定的推广价值。
