往复式凸轮夹钳机构的研究与设计
2021-11-15陈妙芳赵辉军张加杰陈章强
罗 坚,徐 峰,陈妙芳,潘 波,郑 龙,赵辉军,张加杰,陈章强
(1.迈得医疗工业设备股份有限公司,浙江 台州 317600;2.瑞好聚合物(苏州)有限公司,上海 200050)
在医用耗材自动化组装设备行业,气动手指夹的应用非常广泛,主要用于各种物料的夹取动作。然而由于气动手指夹内部集成了滑轨、连杆机构和气缸,导致其自身结构不够紧凑,在较多场合无法使用,如果选用尺寸较小的气动手指夹,不仅夹紧力不够,而且使用寿命也很短。另外,气动手指夹需要配合气缸或电缸一起使用,由气缸或电缸带动气动手指夹移动以夹取物料,如此一来,气动手指夹和气缸的进气管和排气管、磁性开关以及电缸的线缆就比较多,不仅造成管线排布杂乱,还会影响物料的正常夹取。
文献[1-2]专门对直动型凸轮机械手进行了深入的研究,涉及了平面凸轮和弧面凸轮驱动的机械手的设计和分析。受到凸轮机械手的启发,如果能够设计一种移动式夹钳机构,并用凸轮驱动,那么就完全可以替代目前广泛使用的气动手指夹、气缸或电缸,且可以根据实际需求将夹钳设计成任意结构形状,机构和结构简单且成本低。通过多方面的综合对比发现,凸轮机构在自动化设备中有着不可多得的优势,它不仅结构简单、运行速度高,且动作平稳、噪声低、无冲击、可靠性高、成本低、使用寿命长。
该夹钳机构通过两个独立的凸轮联合动作及后续摇杆滑块机构的运动转换,来实现夹钳的往复运动和启动作。由这两个凸轮的廓线形成夹钳的运动并对其进行控制,而凸轮曲线是根据夹钳的动作要求由设计给定的。
1 夹钳机构原理
1.1 机构简图
往复式夹钳建构简图如图1 所示。摆杆A1OfB1和摆杆A2OfB2以Of为公共摆动轴,凸轮 1(cam1)驱动摆杆A1OfB1,通过连杆B1C1带动C1D1的往复运动;凸轮2(cam2)驱动摆杆A2OfB2,通过连杆B2C2带动C2D2的往复运动。在杆C1D1上连接有两个滑槽,两个滑槽分别于C1D1行成转动副,转动副的中心为D1,同时两个滑槽又同时与C2D2以凸轮副连接。

图1 往复式夹钳机构简图
1.2 原理分析
往复式夹钳的运动轨迹图如图2 所示。在轨迹的右端夹钳打开,然后保持夹钳打开状态向左水平移动,到达轨迹的最左端后,夹钳关闭,之后保持关闭状态返回到最右端,行成一个动作循环。

图2 往复式夹钳运动轨迹图
动作起始阶段,两个凸轮一起转动,凸轮1 此时处于休止期,控制C1D1保持不动,而凸轮2 驱动摆杆A2OfB2,通过连杆B2C2带动C2D2向左移动,依靠凸轮副D2驱动连接在D1上的两个滑槽产生相向摆动,即实现夹钳的打开动作;之后,C1D1和C2D2在凸轮1 和凸轮2 的驱动下同步向左移动,此时两个滑槽相对D1保持静止,即夹钳保持打开状态并向左移动;在到达最左侧后,C1D1在凸轮1 的控制下保持静止,C2D2在凸轮2 的控制下向右移动,在凸轮副D2驱动下,连接在D1上的两个滑槽产生相向摆动,实现夹钳的夹紧动作;最后,C1D1和C2D2在凸轮1 和2 的驱动下同步向右移动,此时两个滑槽相对D1保持静止,即夹钳保持关闭状态并向右移动,直到返回到轨迹的最右侧。
2 夹钳机构设计
2.1 相位设计
机构运动相位图如图3 所示。在打开和关闭夹钳的过程中,要保持转动副D1处于静止状态。为了保持夹钳在往复移动中的启闭状态,就要求C1D1和C2D2是同步运动的,因此,其移动的起始时间和动作周期都设计为相同。
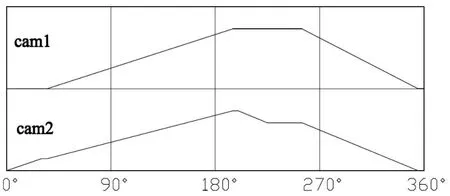
图3 机构运动相位图
2.2 凸轮设计
为了保持C1D1和C2D2运动的同步性,在设计两个凸轮时,选用了相同的运动规律,根据机构运动相位图和文献[3],设计的凸轮1 和凸轮2 的轮廓曲线如图4 和图5 所示。
图4 凸轮1 内轮廓曲线

图5 凸轮2 内轮廓曲线
在设计凸轮时,考虑到要简化夹钳机构的结构,避免使用弹簧约束从动件滚子与凸轮廓面间的啮合,凸轮1 和凸轮2 都采用了沟槽的结构。
2.3 夹钳设计
夹钳机构简图如图6 所示,该夹钳的启闭采用了凸轮机构原理,两个倾斜的滑槽M 和N 交错放置,并共用一个转动副,一个销或滚子放置在两个滑槽的公共交叉处,当销或滚子左右移动时,就可以同时控制滑槽M 和N 的转动角度,且滑槽M 和N 是相向转动,从而控制夹钳的启闭动作。
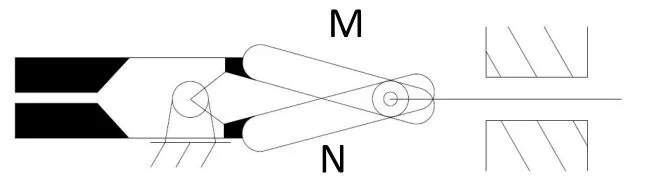
图6 夹钳机构简图
3 夹钳机构结构设计
往复式夹钳机构结构示意图如图7 所示。导杆可以在导筒内滑动,而导筒又可以在直线轴承内滑动。夹钳的上下两部分安装在夹钳座上,夹钳座通过螺钉锁紧在导筒上。凸轮1 和凸轮2 可以独立控制导筒和导杆往复移动,从而达到既可以控制夹钳启闭,又可以在保持夹钳启闭状态的情况下移动夹钳。
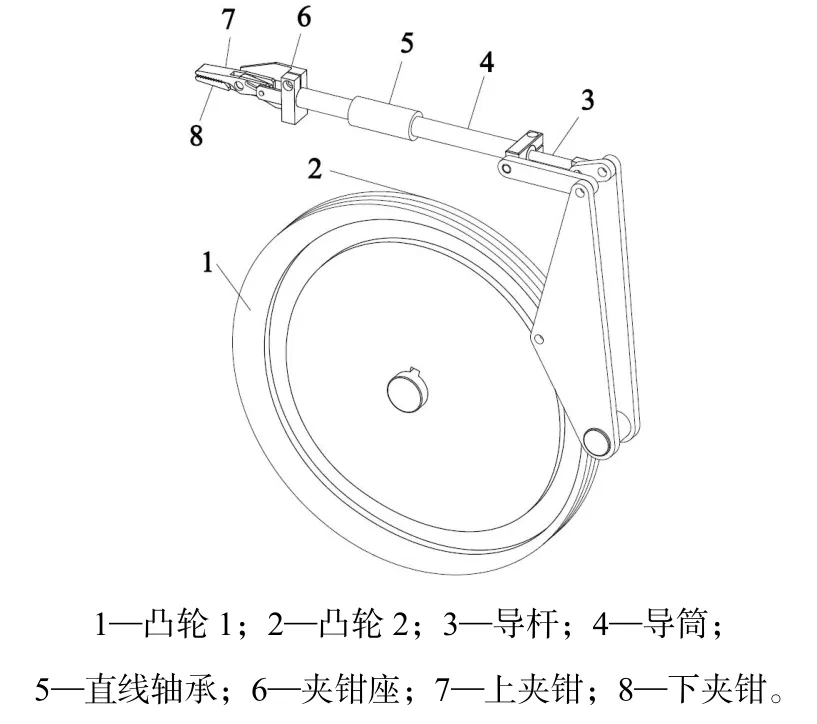
图7 往复式夹钳机构结构示意图
根据传动和结构的需求,凸轮1 和凸轮2 既可以设计成独立的槽凸轮,也可以设计成一个凸轮带双面沟槽的结构形式。
4 结语
根据本文的机构原理和设计方法,可以按照不同的设备需求,将该移动式夹钳机构设计成任意的结构形式,并能将凸轮机构的优势充分地应用到自动化组装设备中。尤其是在医用耗材自动化组装设备领域,该机构可以直接替代气动手指夹、气缸和电缸,在节省成本的同时,还能最大化地提高设备的性能。
