一种绿色节能智能系统的设计与实现
2021-11-13杨斌
杨 斌
(广东东软学院计算机学院,广东 佛山 528225)
0 引言
随着资源消耗不断上升,发现新能源,提高资源的利用率是一个关键的问题。太阳能是一种大自然本身具有的可再生能量,用之不尽且没有污染,合理的使用太阳能可以很好的解决资源方面的问题[1]。目前市场上大部分的太阳伞功能单一,而且随着太阳的移动,有部分位置无法遮阴[2]。少部分电动伞,在原有的基础上添加了太阳板,用太阳板进行收集阳光,并把太阳能转化为电能,同时还装有干电池用于储能,当太阳光不够强烈时会进行电能补充,但是太阳板固定,利用效率不高[3]。智能节能太阳伞,一方面利用太阳提供能量,另一方面为人们遮阳避暑以及提供一些便利的功能如:手机充电,风扇散热等[4]。以上功能,均由太阳能作为唯一能源进行提供,并且不会产生任何的污染成分,绿色,环保。
1 系统的总体设计
本设计的整体系统由控制模块、光照检测模块、执行模块、温湿度检测模块、散热模块、电灯模块、电源模块等组成。其中,控制模块最小系统由四部分组成:STM32F103芯片[5]、复位电路、供电电路、晶振电路;检测模块主要由4个光敏电阻及其外围电路构成;执行模块主要包括舵机和所需的驱动电路;温湿度检测模块主要由DHT11温湿度传感器和外围电路构成;散热模块由风扇和外围电路构成;电灯模块由一个LED灯管和继电器等外围电路构成。
接收到阳光时,4个光敏电阻会产生不一样的电阻,电阻小的方向与太阳光线的方向相同,因此,本系统采用光敏电阻检测太阳照射下产生电阻的差值,可以精确定位太阳相对位置[9-10]。当光线直射到光电传感器(4个光敏电阻)时,他们的左右、上下差值会趋近 0,从此可以通过舵机转动的角度来判断此时太阳光的位置。
电器部分采用自动控制,通过STM32单片机控制光敏传感器来判断太阳的方向并且自动定位瞄准太阳,对太阳进行持续的跟踪和对太阳光高效率的利用。同时通过温度传感器、光敏传感器等传感器收集数据,当温度高于设定的24 ℃时,进而控制风扇的打开,当光敏检测到光线暗时,小灯打开。系统设计框图见图1所示。
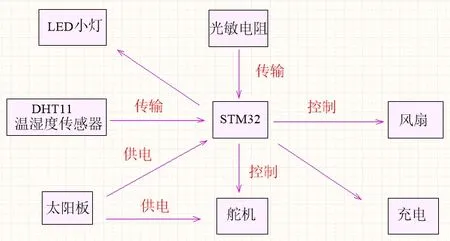
图1 系统整体设计框图Fig.1 overall system design block diagram
2 系统硬件设计
2.1 单片机最小系统设计
控制系统是整个系统中最为重要的地方,相当于人类的大脑,一旦控制系统不能正常工作,其它外围电路以及一些传感器都无法工作,所以说设计中最为重要的地方就是对于控制系统的设计。最小系统由 STM32F103 芯片、供电电路、复位电路、晶振电路四部分组成。
2.2 舵机电路设计
本系统选择LD-27MG数字舵机[6]。其具体参数为:(1)尺寸:40×20×40.5 mm;(2)速度:0.16 sec/60° 7.4 V;(3)工作电压:5-7.4 V。
该舵机的额定电压为 6 V,空载电流为100 mA,有超大的扭力,扭矩为20 kg·cm,可以实现雨伞的移动,精度高,虚位小,有三条接线口,分别为信号线、电源正极线、地线,因此接线比较容易。
其中舵机原理图如图2所示。
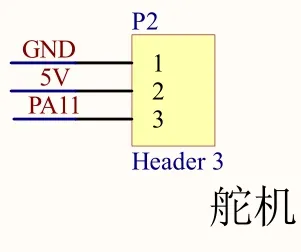
图2 舵机模块电路Fig.2 steering gear module circuit
2.3 光照检测模块设计
光敏传感器使用时,要通过对光照敏感的电子元件将光信息变成电子数据,对于不同颜色的光,检测到的数据信息是不同的,还能实现许多检测功能[7]。本设计的光照信息采集模块主要应用光敏电阻的工作原理制作而成,在不同的光照情况下,检测到的信息不同,传感器的输出为高电位,转换信号,将数字信号发送给单片机,单片机将根据程序执行检测任务。
光照检测传感器结构仿真如图 3所示。用光照检测传感器(4个光敏电阻)产生电压的差值并通过单片机处理来确定太阳能利用装置与太阳的水平相对位置。光照检测传感器检测电路主要由光电传感器、电阻、复位按钮以及STM32芯片里的内置ADC组成[8]。

图3 光照检测传感器结构仿真Fig.3 structure simulation of light detection sensor
2.4 温湿度传感器DHT11设计
DHT11数字温湿度传感器由电阻式感湿元器件和NTC测温元件组成[9],输出的是数字信号。为确保传感器的可靠性和稳定性,使用了一种特殊技术来确定温度和湿度以及数字采集,每个传感器都将被精确校准,并编写成程序使得校准系数存在OTP内存中[10]。产品的封装仅为4个引脚,连接方便,采用单线串行接口,这样简单快捷的让系统进行集成,同时还拥有体积小、功耗低、信号传输距离较远、响应速度快、抗干扰能力强等优势。
电源引脚:该温湿度传感器的工作电压在3-5.5 V之间,在上电1 S后,才能发送任何指令,因为1S前是不稳定状态。如果电源引脚部分有杂波,可通过增加一个电容进行滤波。
串行接口(单线双向):单片机和 DHT11传感器的数据通讯是同步的,通过单总线数据模式,传输一次数据(分数+整数)的时间大约是4 MS。
原理图接线如图4所示。
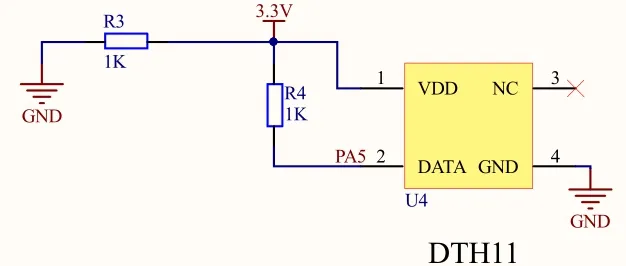
图4 温湿度电路模块Fig.4 temperature and humidity circuit module
2.5 风扇设计
这部分采用继电器加12 V的电脑散热风扇。继电器有三个点,一个可以动(点 3)和两个静止不动(点1和点2)。当线圈失电时,点3和点1接触,此时电路断开,不给风扇通电;当线圈通电时,点3立刻和原来接触点1断开,从而打到点2位置,此时风扇的电路为通路,风扇打开。利用这一原理,可以有效的保护电路的安全,提高安全性和稳定性。
原理图接线如图5所示。

图5 风扇电路模块Fig.5 fan circuit module
3 系统软件设计
软件所使用的开发环境为Keil uVision5,编写设计采用的语言为C语言。系统软件实现的功能:
(1)通过光敏电阻检测到光照强度;
(2)实现太阳定位和跟踪;
(3)根据光照强度控制电灯的开闭;
(4)根据检测到的温湿度值进而控制散热模块的运行。
3.1 主程序设计
首先,单片机上电后先进行一系列的初始化,对系统的时钟等进行初始化,然后接下来开始执行主程序,进而调动各个子程序,检测光照是否暗,当周围的环境比较亮时,关闭LED灯,然后对太阳进行跟踪定位,当周围的环境变暗,雨伞恢复直立状态,并且打开LED灯;检测当前的温度是否达到26 ℃,当大于等于26 ℃时,打开风扇,当温度小于26 ℃时,关闭风扇。
程序设计思路见图6所示。
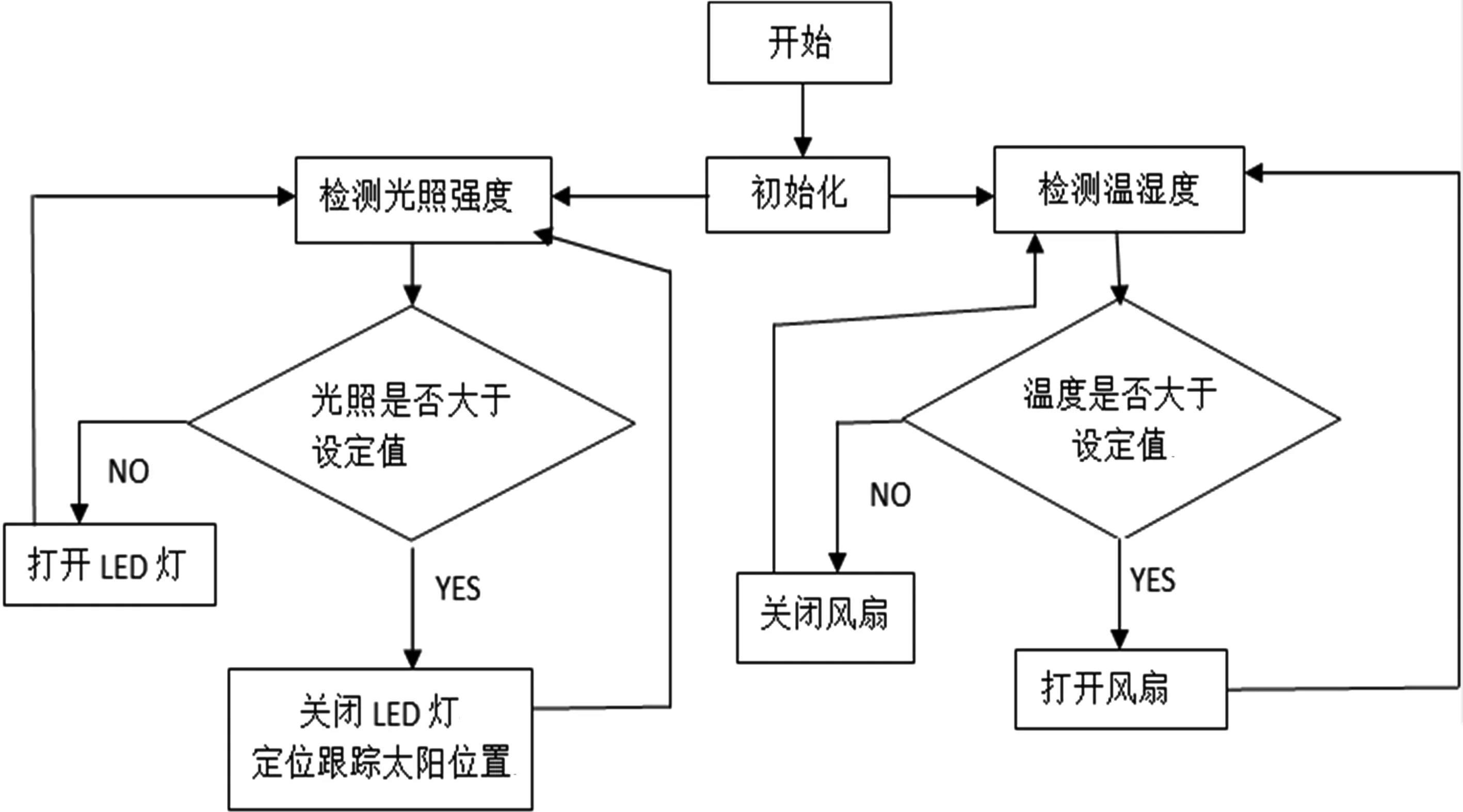
图6 程序流程图Fig.6 program flow chart
3.2 定位跟踪程序设计
当光电传感器(4个光敏电阻)传回相应的阻值并且通过4路ADC传回STM32单片机的内部的4路ADC检测装置,采用ADC四通道逐次转换(单次、单通道软件触发)的方式来检测四个不同的ad数值,通过其差值来检测出太阳的相对位置并反馈到通过数据的处理,4路PWM输出模式用于控制舵机的旋转。当控制转向机构时,需要时间脉冲,脉冲时间通常为 20 ms,部分控制脉冲是高脉冲电平的一部分,控制角度通常为0.5 ms-2.5 ms之间。通过控制舵机的转动,从而达到设备在水平和俯仰方向上的有机运动。测量的转动角度和实际的太阳角度如下表1所示。
表1 太阳高度角实验数据表Tab.1 experimental data sheet of solar altitude angle
4 系统调试
4.1 系统制作
一个简单的项目在开发过程中主要分为 5个主要步骤,第一步:整体系统的概念设计以及该系统在对应领域的需求;第二步:对于概念进行建模仿真;第三步:进行软硬件设计;第四步:编写程序;第五步:反复调试软硬件系统,让二者协调工作,并且稳定运行。
4.2 原理图设计
从原理图中能够得到,整个系统具体分成以下几个模块,单片机最小系统模块、舵机模块、光照检测模块、温湿度测试模块、散热模块、LED模块以及电源模块等。如图7所示。
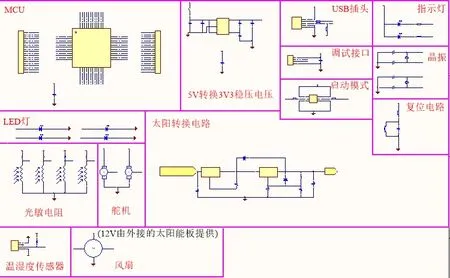
图7 原理图Fig.7 the schematic diagram
4.3 运行结果分析
在实物运行过程中,我们用手机灯模拟太阳光,通过手机灯的转动,来模拟太阳的移动和实现光线的强弱变化,当光强检测装置检测到的数据存在差别时,舵机控制雨伞向光照较强的方向调整,当两端的检测装置检测到的光强数据基本相同时,停止调整;把手机灯关掉后,雨伞会直立,然后打开LED灯;用双手捂热温度传感器,模拟夏天的感觉,风扇会打开反之风扇关闭;同时还可进行充电。
从以上的原理图设计以及运行结果分析可以实现实物硬件的制作和调试,能够实现太阳能方位跟踪系统、开灯、散热、充电等功能。图8为绿色节能智能系统的实物图。

图8 绿色节能智能系统实物图Fig.8 physical drawing of green energy-saving intelligent system
5 结论
太阳能是一种应用价值极高的绿色新型能源,因此其具有较高的应用价值。本文围绕单片机进行太阳能绿色智能追光系统设计,四个方位上的光敏电阻实时检测不同方位太阳光的强度,当检测到有差异的时候,就会发送一个信号到单片机中,单片机就会控制舵机来实现阳伞的转动,进行太阳的跟随。同时温湿度传感器一直在工作,当达到规定的温度值或者湿度值时候,风扇就会转动,开始对环境温度的调节。将太阳能转化为电能,并把转换的电能运用到设备中去,适应当前社会提倡的节能减排生活且环保、无污染;市场非常广泛,使用价值高。
