一种具备自动感光和防疲劳驾驶的智能车用遮阳板
2021-11-12黄孝慈朱祉彧张海波
张 寅,黄孝慈,李 超,朱祉彧,张海波
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
0 引 言
随着中国汽车行业的快速发展,国内的汽车保有量日益剧增且交通事故频率越来越高,根据美国国家公路交通安全管理局(NHTSA)交通事故数据分析可知,每年由太阳的眩光引发的事故高达数千起,道路交通事故率超过16%。市面上的车用遮阳板主要是由遮阳板体和遮阳板转动轴构成。遮阳板转动轴固定在主驾驶或副驾驶前方顶棚上,可绕遮阳板转动轴转动。驾驶途中,驾驶员的注意力会被手动调节遮阳板而分散,存在着一定的安全隐患。
随着汽车技术不断的发展与完善,在行车安全辅助系统中,遮阳板占据着重要地位。在遮阳板的原有基础上进行改良设计,有利于提升汽车的智能性和人性化。控制系统是智能车用遮阳板系统的关键,是一个集数据采集、数据计算等功能于一体的系统装置,是现代智能化、机电一体化的重要组成部分。
综上所述,通过对智能遮阳板控制系统的研究和开发,可以减少眩目对驾驶员的危害及不必要的动作导致的交通事故,保障了驾驶员行驶的安全性。不断完善及应用智能控制系统能极大地促进道路交通安全,弥补了汽车智能化的空缺。
1 智能车用遮阳板的结构设计
智能遮阳板总体结构包括遮阳板板体、遮阳板转轴、遮阳板转动驱动装置总成及其内置的电控模块、环境光传感器、太阳能电池板,如图1所示。遮阳板体连接遮阳板转轴并可由其带动转动,遮阳板转轴另一端深入遮阳板驱动装置壳体内,连接至遮阳板驱动电机。同时,电机利用传动装置带动遮阳板向内侧转动。环境光传感器感应环境光强,其信号线连接至驱动遮阳板驱动装置总成内置的电控模块,通过光感信号控制电机输出转数,以控制遮阳板体和遮阳板转轴的转动。摄像头安装在驱动遮阳板转动驱动装置总成壳体外侧,其信号线连接至驱动遮阳板转动驱动装置总成内置的电控模块。摄像头对准驾驶员面部位置,拍摄驾驶员的面部照片,通过电控模块的芯片内置程序分析驾驶员是否疲劳。
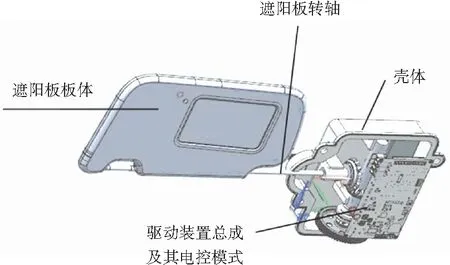
图1 智能遮阳板的总体结构
2 硬件电路设计
智能遮阳板控制系统的硬件设计是采用各独立子系统配合完成作业的设计方法,分为控制芯片Arduino UNO电路单元、电源的管理单元、环境光传感器采集单元、直流驱动电机单元。
要求所设计的控制系统具备采集光照强度且转换成PWM信号来控制电机的功能,实现在一定的太阳光照下,遮阳板能够转到相应的角度。
智能遮阳板项目中有3种方式控制遮阳板的动作:
(1)用外部单片机或电脑输入交替脉冲信号经Arduino处理后控制步进电机以时间间隔T进行正转至角度θ切换反转,从而带动遮阳板重复放下收起动作;
(2)通过环境光传感器根据不同光强输入信号经Arduino处理后控制步进电机转动,光强增加时,驱动步进电机逆时针旋转使遮阳板至θ时停止;光强减少时,步进电机顺时针旋转带动遮阳板至水平复位;
(3)手动调试模式则是通过电位器控制步进电机旋转带动遮阳板至任意特定角度。
3 控制系统软件设计
控制系统由以下几个模块组成:单片机初始化模块、环境光传感器采集模块、电机控制模块、驾驶员眼部图像识别模块。采用模块化形式分别编程,最后将所有程序结合在一起,使得结构清晰。
(1)单片机的初始化模块包括:IIC主机模块、PWM模块初始化;
(2)环境光传感器采集模块:环境光传感器检测到光强,并将返回信号输入单片机的输入端口,程序不间断地读入输入端口的信号,通过计算得出合适的PWM信号控制电机角度;
(3)电机控制模块:电机控制端通过传感器直接输出的PWM信号控制电机输出轴的转动角度;
(4)驾驶员眼部识别模块:通过摄像头捕捉驾驶员眼部区域,将获取得到的照片输入,通过识别照片上脸部表情特征判定驾驶员是否处于疲劳状态。
人脸识别系统做为主要利用OpenCV、Tensorflow和Pytorch框架构建而成。下载并调用 OpenCV 视觉处理库中提供的数据集,利用深度学习的目标检测器对数据集中的图像进行人脸检测[1]。
数据集中图像主要来自摄像机采集,并利用相关标注软件对图片进行标注。利用图片二值化的预处理方法,可降低模型对图像大小以及位置的敏感性。根据需要,更改文件里面的迭代次数等参数。算法通过标注文件中的位置数据,搜索人脸所在的位置。通过训练人脸检测器,最终训练权重将保存至相应文件夹下。训练阶段主要是在数据集中提取出特征关键点,将图片的最大特征值与对应的标注信息定义为元空间的各个子集。如果需要添加新图像,这些子集可更新,并重新进行训练。然后,调用专属文件,判断输入图片是否属于人脸图像,如果是,则可以利用算法中设置的预选框搜寻,拟合图像中人脸的位置。如若识别的一个未知的人脸图像,则需要将图片和其标注信息添加到模型中,重新训练人脸检测器[2]。
脸部表情识别算法基于OpenCV和Pytorch搭建出的系统框架来实现的。通过对Gabor小波变换的特征进行提取,用Gabor小波变换系数向量代替图像的灰度特征,以减弱图像对光照和位置的敏感性。同时,使用PCA/LDA Fisher判别分析法对Gabor向量进行降维,提取特征空间的高特征的子空间进行训练[3]。利用C均值动态聚类的方法构造表情判断模板,分别包括点头频率、打哈欠、眨眼频率3种常见行为模式[4]。最后,使用K近邻判别法将各个子表情模板待识别的图像进行匹配[5]。
本系统采用Mixly和Arduino IDE控制系统,程序采用C++和python混合编写,提高了系统研发效率,方便了程序的设计[6]。
检测光照的强弱性的控制器主要存在于反馈控制系统中,能够通过比较检测量和给定量来计算控制量。为了确保遮阳板转动的角度适合,系统的控制变量主要是电机的转动时间,使遮阳板能以最快的速度转动。系统要确保在接近转动临界点的时刻尽快减速,且角度偏差要小,由此遮阳板才能平滑地转动。重新检测光照强度时,遮阳板的角度要以初始的位置为基础,计算电机的转动时间并且跟当前位置做比较,调整转动时间并弥补正向(反向)角度进行转动。
4 结束语
本文基于遮阳板国内外现有的相关研究和设计,结合机电一体化概念,改进传统遮阳板的工作模式,赋予其更多功能,提高了汽车遮阳板的实用性和行驶时的安全性。减少了交通事故发生率。
