飞轮储能系统中双向功率变换器控制策略的分析与研究
2021-11-11陶雪峰吴俊孙露露周贝
陶雪峰,吴俊,孙露露,周贝
(国网宣城供电公司,安徽 宣城 242000)
一次性能源煤、石油等不仅面临着能源耗尽的危机,同时也产生了雾霾等环境问题,为寻求解决方法,新能源技术得到了快速发展。可充分利用新能源并且不危害大电网的微电网技术应运而成[1],而由于风能、潮汐能、太阳能等新能源均具有不稳定性、间歇性、随机性等特点,储能装置成为微电网中不可或缺的环节[2]。众多储能技术中,飞轮储能技术由于其环保性较好、充放电速度快、可深度放电、充放电循环次数多、寿命长、效率高等优点备受关注[3]。
飞轮储能装置主要由电动/发电机、电力电子装置、飞轮转子、轴承系统、控制系统、真空室组成[4]。可四象限运行的背靠背变换器具有升压变换器的特性,且可调节网侧功率因数[5],为微电网提供无功功率,适用于作飞轮储能装置中的电能转换装置。
背靠背变换器主要由网侧PWM变换器、直流母线电容、机侧PWM变换器三部分构成[6],网侧PWM变换器与电机侧PWM变换器的功能独立,可采取独立控制策略[7-8]。采用独立控制策略时,虽控制策略简单、控制系统易实现、开发难度小,但是系统的动态响应慢[9]。对于微电网而言,不稳定的新能源会导致发电机的输出功率出现骤降、骤升等情况,而电网负荷同样会出现波动,导致微电网频率、电压出现波动,影响电能质量,甚至损坏用电设备[10]。采用独立控制策略控制的背靠背变换器动态响应速度慢,不能实现对微电网电能质量的快速调节[11]。
为改善这一问题,文献[12-13]基于直接电流控制策略,提出了增加电流前馈补偿环节的控制策略。电流前馈补偿环节可直接将电机侧PWM变换器的电流信息反馈给网侧PWM变换器的电流内环,而不需通过直流母线电压的波动来获取电机侧PWM变换器电流的信息,改善系统的动态性能。文献[14]提出了直接电容电流控制策略,该控制策略的控制目标是使流入直流母线电容的电流为零,即控制网侧PWM变换器的输出电流与电机侧PWM变换器的输入电流相等,从而实现减小甚至消除直流母线电容上功率波动,改善系统的动态性能,然而直流母线电容电流需通过电流传感器检测,并且母线电容电流为脉冲电流,检测困难,增加了系统的成本[15]。
本文提出了一种基于直流母线电压平方外环、功率内环的直接功率控制策略基础上增加了功率前馈补偿环节的控制策略。采用电压平方外环能解决飞轮储能系统启动过程中直流母线电压建压时,网侧PWM变换器的输入电流冲击问题;采用功率内环控制策略相比于电流内环控制策略,能够检测到电网电压变化;采用功率前馈进行补偿,能使网侧PWM变换器快速跟踪电机侧PWM变换器功率的变化。本文基于提出的控制策略搭建了仿真与实验平台,验证了该控制策略的可行性。
1 数学模型分析
背靠背变换器的拓扑如图1所示,主要由网侧滤波电感L、网侧PWM变换器、直流母线电容、电机侧PWM变换器与电机等组成。

图1 背靠背变换器拓扑示意图Fig.1 Back-to-back converter topology
网侧PWM变换器在两相旋转d-q坐标系下的数学模型可表示为

式中:ed,eq为电网三相电压在d-q坐标系下d,q轴的分量;id,iq为网侧三相电流在d-q坐标系下d,q轴的分量;ud,uq为网侧PWM变换器三相输入电压在d-q坐标系下d,q轴的分量;sd,sq为网侧PWM变换器的开关函数;icap为流入直流母线电容内的电流;udc为直流母线电容电压;iload为机侧PWM变换器输入电流;L为网侧滤波电感;R为网侧等效电阻;C为直流母线电容;ω为网侧电流角频率。
由式(1)可知,流入母线电容的功率表示为

机侧PWM变换器的输入功率可利用负载等效电阻表示为

由功率守恒定律可知,网侧变换器的输出功率可表示为

由式(2)~式(4)可知,网侧变换器的输出功率可表示为

由式(5)可获得直流母线电压平方与网侧PWM变换器的输出功率之间的传递函数,如下式所示:

式中:s为微分算子。
由式(6)可知,直流母线电压平方外环与电网侧PWM变换器的输出功率为一阶线性关系,利用PI调节器进行控制时,可表示为

式中:kdp,kdi为直流电压平方外环的控制器的比例系数与积分系数;p*为网侧PWM变换器输出功率的给定值。
若忽略网侧PWM变换器的损耗,网侧PWM变换器的输出功率可用网侧变换器的输入功率表示,由瞬时功率理论可知,网侧变换器的输入功率可表示为

式中:p为有功功率;q为无功功率。
采用电网电压定向时,三相电网电压在d-q坐标系下可表示为

式中:Em为电网电压矢量幅值。
由式(1)、式(8)、式(9)可知,网侧PWM变换器在d-q坐标系下的数学模型可表示为

由式(10)可知,网侧PWM变换器的有功功率与无功功率并未实现完全解耦,利用PI调节器进行控制时,可表示为
式中:kdp1,kdi1为有功功率控制器的比例系数与积分系数;kqp1,kqi1为无功功率控制器的比例系数与积分系数;u′d为有功功率控制器的输出;u′q为无功功率控制器的输出。
根据式(10)、式(11)可获得网侧PWM变换器输入电压在两相旋转坐标系下的控制方程:

2 直接功率控制策略
根据式(7)、式(11)、式(12)可确定网侧PWM变换器的控制策略,即采用电压平方外环与功率内环的直接功率控制策略,其控制框图如图2所示,其中图2a为网侧变换器控制策略,图2b为机侧变换器控制策略。

图2 带功率前馈补偿的背靠背变换器的控制策略Fig.2 Back-to-back converter control strategy with power feed-forward compensation
2.1 电压平方外环分析
采用电压平方外环控制策略相比于普遍采用的电压外环控制策略,其对网侧PWM变换器的输入电流的控制为变系数PI控制。
忽视网侧变换器损耗后,由式(8)、式(9)可知采用电网电压定向后,网侧PWM变换器的输入功率可表示为

即网侧PWM变换器的输入电流可表示为


图2a中,||2为直流母线电压的平方。图2b中的变量为飞轮电机采用矢量控制策略时的变量,如ima,imb,imc为电机的三相绕组电流;iα,iβ为电机电流在α-β坐标系下的分量;ist,ism为电机电流在m-t坐标系下的分量;usm,ust为电机绕组电压在m-t坐标系下的分量;uα,uβ为电机电流在α-β坐标系下的分量;P为电机运行功率,P*为电机运行功率参考值。
因此采用电压平方外环控制时,网侧PWM变换器输入电流的控制相当于变系数的PI控制,而采用电压外环控制时,网侧PWM变换器的输入电流为恒定系数的PI控制,其控制方程可表示为

在飞轮储能系统初启动时,母线电压建压过程中,采用变系数电流PI调节器,系数逐渐增加,避免了电流冲击对系统的损害。
2.2 功率内环分析
采用功率内环的直接功率控制策略相比于普遍采用电流内环的直接电流控制策略,飞轮储能装置可快速响应电网电压的波动对电网电压进行调节。
由式(6)与式(13)可知,母线电压平方与网侧PWM变换器的输入电流为一阶的线性关系,可表示为

由式(17)可知,采用电流内环的直接电流控制的控制方程可表示为

为实现d,q轴电流完全解耦,可采用下式所示的控制方程:

式中:kdp2,kdi2为采用电流内环时,d轴电流控制器的比例系数与积分系数;kqp2,kqi2为采用电流内环时,q轴电流控制器的比例系数与积分系数。
因此,网侧PWM变换器的输入电流可表示为


由式(21)可知,直接电流控制策略并未采集电网电压信息,当电网电压出现波动,飞轮电池充放电电流不能及时进行调节。而采用直接功率控制策略,电流调节器采集了电网电压信息如式(15)所示,能有效抑制由于微电网电压波动造成的母线电压的波动。
2.3 功率前馈环节分析
由式(5)可知母线电压波动表示为

即在微电网电压恒定的情况下,母线电压波动由id与P2确定。当P2变化时,网侧PWM变换器需通过感知udc的波动来调节id。因此P2变化时,网侧PWM变换器的调节速度滞后,需通过电容充放电实现网侧PWM变换器功率与机侧PWM变换器功率的平衡,影响系统的动态性能。母线电压频繁的波动,会导致系统不稳定,效率降低,动态性能差。为改善系统动态性能,图2所示的控制策略中还采用了基于式(4)所示的功率守恒,采用功率前馈补偿的方式减小机侧PWM变换器功率变化对直流母线电压的影响。
3 仿真及实验验证
3.1 仿真结果分析
本文利用Simulink搭建了仿真平台。图3、图4所示为飞轮储能系统从充电状态切换为放电状态时的母线电压波形与微电网侧电压、电流波形。从图中看出,采用该控制策略实现飞轮储能系统平稳的切换工作状态。微电网侧PWM变换器能够由整流状态迅速切换到逆变状态,可实现单位功率因数运行。飞轮储能装置能够迅速切换工作状态,充放电速度快,能够迅速对微电网电能进行调节,提高微电网电能质量。

图3 直流母线电压仿真波形Fig.3 Simulation waveform of the DC voltage
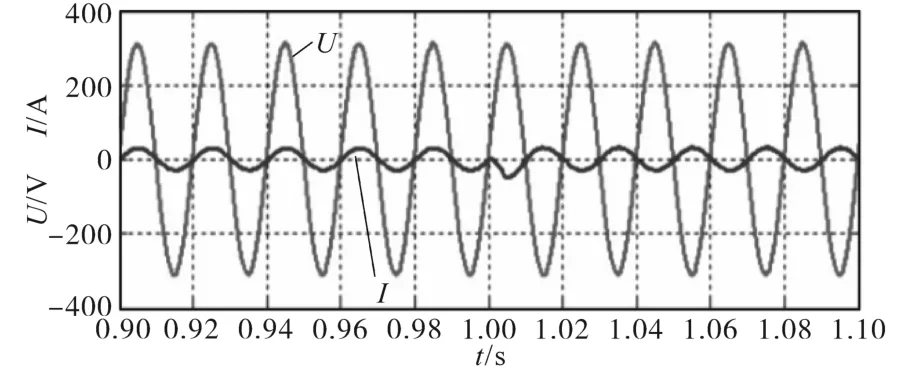
图4 微电网电压、电流仿真波形Fig.4 Simulation waveforms of the micro-grid voltage and current
3.2 实验结果分析
为验证该控制策略的优越性,参照图5所示的实验平台原理图搭建了实验平台。
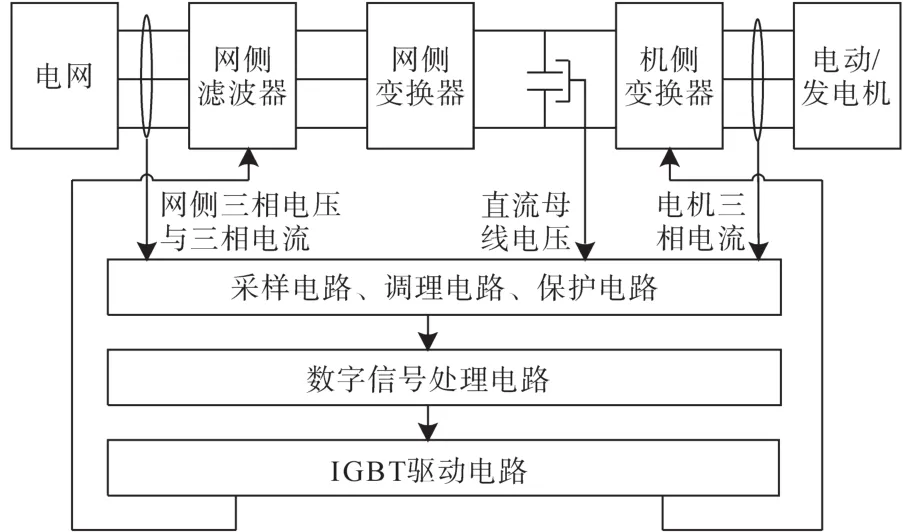
图5 背靠背变换器的实验平台原理图Fig.5 The schematic map of back-to-back converter system
图5中,控制系统数字信号处理器选用了飞思卡尔公司的MC56F8346,背靠背变换器中功率器件选用了英飞凌公司的FS50R06KE3,IGBT驱动芯片选用了Avago公司的光电耦合器HCPL-316J。本文通过大电网代替微电网,实现飞轮储能系统充放电的控制。
图6、图7所示为飞轮储能系统从充电状态切换到放电状态时,直流母线电压波形与电网侧电压、电流波形。从图中可以看出,采用增加功率前馈补偿的直接功率控制策略,能实现飞轮储能系统平稳的切换工作状态;直流母线电压的波动较小,调节时间短,可在20 ms内快速恢复;当飞轮储能系统切换工作状态时,电流畸变小,电流调节速度快。因此当微电网用电负荷或供电功率发生变化后,飞轮储能系统能够快速切换工作状态,调节微电网电能质量。

图6 直流母线电压实验波形Fig.6 Experiment waveform of the DC voltage

图7 电网电压、电流实验波形Fig.7 Experiment waveforms of the grid voltage and current
4 结论
微电网系统中储能装置不可或缺,飞轮储能装置具有诸多优点,使得其受到越来越多的关注,本文针对飞轮储能系统中电力电子装置所采用的背靠背变换器的数学模型进行了分析,在此基础上提出了增加功率前馈补偿的直接功率控制策略。该控制策略能够在飞轮储能系统充电建压启动过程中避免电流冲击;且该控制策略能够及时反馈电网电压信息。增加功率前馈补偿环节后电网侧变换器能够快速跟踪电机侧变换器的功率波动,动态响应快。对于微电网系统,采用该控制策略后飞轮储能装置能够快速调节微电网中由于用电负荷、发电机输出功率变化导致的微电网中电压幅值与频率的变化,提高电能质量。
