十三陵电厂可逆式水轮发电机组镜板三维视觉检测系统总体设计方案研究
2021-11-11潘春强刘伟许旭辉许红义
潘春强,刘伟,许旭辉,许红义
(国网新源控股有限公司北京十三陵蓄能电厂,北京 102200)
0 引言
在对可逆式水轮发电机组镜板进行三维测量时,会遇到采样布点方式存在差异性、数据评定方法参差不齐、测量仪器精度不高等问题,制约了可逆式水轮发电机组镜板平面度的获取,成为了水轮机组检修测量的一大难题[1]。假如可逆式水电机组镜板平面度测量得到的精准度不高,那么可逆式水轮放电机推力瓦的使用寿命和温升情况、大轴摆动的稳定性、油膜的平稳性等均会受到干扰,不利于整个机组的正常运行。因此,本文将以十三陵电厂可逆式水轮发电机组镜板为研究对象,运用了数字近景摄影测量技术,给出了镜板三维视觉检测系统的总体设计方案,明确了标志点的布设规范,得到了镜板平面度、装配圆柱的圆柱度等的测量结果。
1 数字近景摄影测量原理
在遇到无法直接测量的物体时,我们常常会借助数字近景摄影测量技术进行测量,通过该技术能够将被射物体姿态进行三维重现[2-3]。近景摄影测量的基本原理如下:获取被摄物体的立体数字影像,而后借助计算机对该影像进行处理与匹配,自主识别被摄物体图像的坐标和像点,最后通过解析摄影测量技术获取被摄物体的三维坐标,输出正射影像、数字高程模型以及适量线划图等。与传统测量方法相比,数字近景摄影测量的优势在多个方面均有体现,如安全性、时效性等。近景摄影测量在对物体进行摄影测量时,会通过二维影像的方式对物方空间进行重建,这属于影像形成的逆过程。在近景摄影测量中,通常会使用到三种坐标系统,如图1所示。

图1 近景摄影测量坐标系
由图1可知,P为物方点,对应的空间坐标可表示为。S为摄影中心,对应的空间坐标可表示为,假如在不同的摄站拍摄相片时,通常会选择第一个摄站的空间坐标系作为摄影测量坐标系。坐标原点位于投影中心,x、y轴分别平行于像平面坐标系中的x、y轴,此时的z轴与摄影光轴会重合起来,那么像点p的空间坐标系可表示为。O为物方坐标系,简称世界坐标系,对应的空间坐标可表示为。o为像平面,其坐标可表示为,像片的几何中心是该坐标系的原点,x轴与像素的水平采样方向平行,通过判断原点与主点o的重合度,可断定成像系统是否处于理想状态。结合光学的基本原理,可通过数学方法表征近景摄影测量的共线条件方程,如式子1所示。

其中,像点坐标由x、y表示,物方坐标由X、Y、Z表示,摄影中心点坐标由Xs、Ys、Zs表示。在物方坐标系中,误差修正系数由x0、y0、Δx、Δy表示,空间坐标系相对于物方空间坐标系的方向余弦可由d1、d2、d3、b1、b2、b3、c1、c2、c3表示。通过共线方程、内外方位定位以及坐标变换,可以获取物方点坐标,进而实现物体的三维测量。
2 总体技术方案设计
2.1 测量内容基本概述
为了确保可逆式水轮发电机组镜板三维视觉检测系统总体设计方案的可行性,此处以北京十三陵抽水蓄能电厂为研究对象,进行现场测量研究。为了提高视觉检测的工作效率,融合了多方面学科的非接触式测量技术,对应的模块化结构如图2所示。
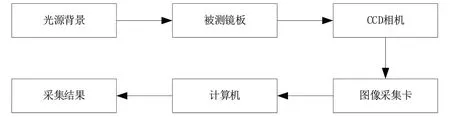
图2 镜板视觉检测系统模块化结构
可以看出,机器视觉检测模块包含了CCD相机、被测镜板等模块,通过这些模块实现可逆式水轮发电机镜板视觉的测试。具体测试流程如下所示:首先,打开合适的光源;其次,借助CCD相机对可逆式发电机镜板区域进行环绕式拍摄;最后,对采集得到的照片图像进行处理,以获取镜板形貌数据信息。在检测系统由硬件系统和软件系统组成,其中,CCD相机、光源、测量编码点均属于硬件系统,计算机属于软件系统,负责对镜板图像的处理工作,以得到镜板尺寸数据。三维尺寸测量内容设定有三:第一,测量分析镜板平面度。第二,测量分析装配圆柱的圆柱度。第三,测量分析装配圆柱与镜板平面间的垂直度。具体而言,借助摄影测量软件对照片图像进行处理(如同名点匹配、特征点扫描等),而后得到测量点的三维坐标[4]。
2.2 现场测量
借助单相机系统对镜板进行多角度拍照,在拍照期间,每个靶标至少需要拍摄4次,如此才能为后续的图片拼装、数据解算提供便利。在结束现场测量后,借助摄影测量软件对拍摄得到的图片进行同名点匹配、特征点扫描等操作,获取每个测量点的三维坐标[5]。根据所得的测量结果,可分析出镜板的平面度、装配圆的圆柱度、镜板平面与装配圆轴线间的垂直度等信息。其中,在测量分析镜板平面度时,需要通过拟合操作对测量点的三维坐标进行处理,获取每个标志点的三维偏差,进而完成镜板平面质量的评价工作,对应的拟合图如图3所示。

图3 镜板平面测量数据拟合
在测量分析装配圆柱的圆柱度时,需要通过拟合操作对测量点的三维坐标进行拟合处理,以获取每个测量点的三维偏差,实现装配圆柱的质量评价,对应的拟合图如图4所示。

图4 三维坐标圆柱拟合
在测量分析镜板平面与装配圆轴线间的垂直度时,需要对镜板平面与装配圆轴线间的夹角情况进行测量与分析,进而分析出二者之间的垂直度情况,如图5所示。

图5 镜板平面与圆柱轴线垂直度情况
3 结语
总体而言,本文首先对数字近景摄影测量原理进行了详细说明,而后对近景摄影测量坐标系展开了分析,如物方点空间坐标、摄影中心点坐标等。其次,对测量内容、测量前的准备事项进行了概述,给出了相应的模块化结构图与标志点的粘贴细则。最后,进行了现场测量,得到了镜板的平面度、装配圆的圆柱度、镜板平面与装配圆轴线间的垂直度等重要信息。
