基于北斗导航的智能棉花播种机设计与试验*
2021-11-11宋德平王成孙冬霞刘凯凯张爱民
宋德平,王成,孙冬霞,刘凯凯,张爱民
(滨州市农业科学院,山东滨州,256600)
0 引言
棉花作为我国第一大经济作物,是国家重要的战略物资。饲草—短季棉连作模式在稳定棉花生产的基础上,因地制宜增加一季优质饲料作物,提高土地综合效益,具有较好的发展前景。饲草―短季棉连作种植模式适宜宽行密植适合机械化采收种植模式[1]。为适应棉花机械化采收的要求,以76m等行距为宜;播种时开沟深度不小于5cm,种肥沟宜窄,使覆盖的秸秆分向沟两侧,以不遮盖播种沟为宜,播深3~5cm,种子需与湿土接触以确保种子的发芽率[2],种肥应施在种子下方5cm以上;作业时要求无缠轴、壅堵等现象,播种量、施肥量、播种深度易调节,镇压踏实,稳定性好,作业效率高[3]。
传统的棉花播种机械作业精度低自动化程度不高[4],一是易产生重播与漏播现象;二是精度低导致交接行不准确,从而引起中耕困难、土地浪费严重、棉花采摘损耗大[5];三是播种环节受前茬作物根茬影响,缺苗断垄现象严重;四是棉花生长后期追肥易造成对棉株的损伤,严重影响种植户的收益。
本文通过采用北斗卫星导航系统(DBS)实现无人驾驶的基础上,在智能排种控制、浮动式播种单体仿形、往复摆动式精量排种、分置式种下分层施肥、种肥隔离、镇压塑形等关键技术进行了创新设计,大量生产试验表明,基于北斗导航的棉花智能精量种下分层施肥播种机,每千米偏差不超过 2cm;作业后的条田接行准确,播行端直,提高衔接行的精准度和播行的直线度,土地利用率提高5%,大幅降低了劳动强度。
1 总体结构及工作原理
北斗导航卫星导航系统的定位技术实时采集运行数据判断,并做以程序指示,通过精准的定位,大大提高播种效率,降低人力成本,提高播种质量。整机自动控制单元采用总线通讯方式控制各个控制单体,一是可以实现信息的可靠传递,主控制器通过无线遥控或在线方式实现对多个播种单体的控制;二是可以根据实际需要调整播种单体数量,而无需变更播种控制系统,各分体之间间距可调,适应于不同行距的种植模式;三是利用光纤传感器、光纤信号放大器及自编程序对排种器排出的种子进行精准识别,再结合创制的硬件系统和控制策略,伺服电机并根据不同排种器排种数量与预定播种量比较的反馈数据实现精准控制。
1.1 总体结构
智能棉花种下分层施肥精量播种机的整体结构如图1所示,主要由机架、限深轮、三点悬挂装置、变速箱、肥箱、仿形弹簧座、浮动拉杆、种箱、播种单体纵梁、种肥隔离镇压塑性单体、双圆盘开沟器、种肥开沟器、底肥开沟器、智能排种控制系统、智能排肥控制系统等组成。机架包括由三点悬挂装置、前后梁体、连接侧板、仿形弹簧座等组成。种床整备及防堵装置包括变速箱、万向节、刀轴、平面弯刀和刀轴支撑座板。单体联动式仿行镇压整形装置包括往复式智能精量排种装置、双圆盘开沟器、种箱、输送连接部件。机架上有单悬拉杆铰链轴座,单悬拉杆铰链轴座焊接在机架的前横梁后部,机架的后横梁上有仿形弹簧座,仿形弹簧座焊接在后梁的上部,单悬拉杆一端与机架的前横梁轴座通过铰链轴相连,单悬拉杆在前横梁处可以绕铰链轴上下转动,单悬拉杆中部位置与机架后梁上部的仿形弹簧座通过浮动连杆相连,浮动连杆下端与单悬拉杆通过铰链轴相连,浮动连杆可以绕单悬拉杆左右摆动,浮动连杆上端与机架后梁上部的仿形弹簧座上的铰链轴相连。浮动连杆上端穿过弹簧座上中间带孔的转轴,浮动连杆上部用定位销锁定,上下位置可以通过改变浮动连杆上孔的位置调整。这样机具在工作时,每个播种单体均可上下浮动,实现播种单体的地面仿形。四组仿形播种装置单体等行距布置,行距76 cm,每个单体与机架采用浮动连接方式,解决播幅范围内地表不平情况下播深一致性问题。

图1 棉花免耕种下分层施肥精量播种机结构图Fig.1 Structure of cornplanter sketch map1.播种单体纵梁 2.种箱 3.浮动拉杆 4.仿形弹簧座 5.肥箱 6.变速箱 7.三点悬挂装置 8.限深轮 9.底肥开沟器 10.种肥开沟器 11.双圆盘开沟器 12.种肥隔离镇压塑性单体
1.2 工作原理
作业时,播种机通过三点悬挂与拖拉机连接,由其牵引前进。拖拉机的动力输出轴经万向节轴把动力传递给安装在机架上的变速箱输入轴,经变速箱变速换向后,经变速箱动力输出轴通过万向节轴传递给苗带清整及防堵装置,装有双螺旋等近距排列平面弯刀的刀轴在动力驱动下作顺时针旋转(常见的旋耕机均逆时针旋转),平面弯刀在接近地面处为滑切和前抛运动,将播种带内表层秸秆或根茬切断在施肥开沟器的作用下并抛至播种带两侧,并破除地表干硬土层,同时剔除施肥开沟器立柱缠绕的秸秆或残茬。安装在机架前梁后部的底肥开沟器开出肥沟沟槽,肥料沿开沟器立柱下落到开沟器开出的地表下15~25 cm的沟槽内,开沟器开出的土壤回落到沟槽内,覆盖肥料。清草刀轴顺时针旋转与机具前进方向相同,把挂在开沟器上的秸秆及杂草清理掉,同时将底肥开沟器开沟过程中掀起的大土块打碎回落沟槽内。种肥开沟器安装在双圆盘开沟器的前端,清草滚筒也会把挂在种肥开沟器上的杂草清理掉。种肥开沟器在旋松的土壤内行走,种肥开沟器把肥料施至地表下10~12 cm内。双圆盘开沟器二次开沟,在开沟过程中双圆盘开沟器能够将秸秆杂草推开,将种子直接播进土壤中,后面的种肥隔离镇压塑形机构,种肥隔离轮对种肥有效隔离,镇压塑形轮对种子进行镇压,并把地表塑成“凸”形“上虚下实”的覆土层。信号接收器把接收到播种机的速度信号传递给智能施肥播种控制系统,控制系统通过预先输入的施肥量和播种量根据播种机速度的变化控制播种施肥控制电机的转速实现播种施肥智能控制。整机技术参数如表1所示。

表1 整机技术参数Tab.1 Technical parameters
2 关键部件设计
2.1 智能控制系统设计
智能控制系统的目的就是通过农艺要求的播种量根据外界环境的变化实现智能控制,播种量与机具的前进速度和排种器的转速有关,在设计控制系统时一是通过机具的信号接收装置接收到北斗导航系统的传送的机具速度[6],二是通过控制与排种器直接相连的伺服电机转速来改变排种器的转速[7],三是通过在排种口安装排量检测传感器把检测的数据反馈给控制系统,控制系统把反馈数据与设定数据进行比较分析随时控制伺服电机转速使排种量更加精确[8]。智能控制系统主要由中控系统、施肥控制器、排种控制器、排肥伺服电机、排种伺服电机、速度信号采集器、排种反馈系统等组成。
2.1.1 智能播种控制系统方框图
根据上述功能设计出智能控制系统的方框图(图2)。首先通过键盘输入一个播种量设计值信号传送给单片机,单片机根据采集到的机具前进速度和播量公式进行处理得到一个对应的排种器电机的转速,通过PWM调速来实现控制电机的转速,在电机轴端上有编码盘对电机的转速进行检测,并反馈给电机驱动器使其进行转速调整后输出精确地电机转速,形成一个闭环控制系统。安装在排种器排种口的光纤传感器对播种量进行检测,单片机通过检测信号与设定的播种量设计值进行比较后,输出与播种量设计值相匹配的转速信号,又形成一个闭环系统,整个控制系统采用两个闭环系统实现整个系统的准确性与可靠性[9]。

图2 智能控制系统方框图Fig.2 Block diagram of intelligent control system
2.1.2 智能控制系统执行机构设计
智能控制系统的目的就是通过实际的播种来实现控制播种量与机具的前进速度和排种器的转速有关,因此在对控制系统设计时通过检测装置检测机具的前进速度和通过控制与排种器相连的电机转速来改变排种器的转速,另外在排种口安装检测排种量的传感器,构成一个反馈系统,把检测的数据与实际需要的播种量进行比较。
排种检测模块设计:农机播种作业环境易潮湿、尘土多等特点,综合考虑棉籽的大小,传感器的成本、性能、精度、电路的复杂程度等,本检测系统选用FFTQ-1025光纤传感器,并FF-300高性能双数显两路输出光纤放大器与其配套。该类型光纤传感器检测距离为是25 mm,最小检测直径1 mm,区域光纤为25 mm×10 mm(长×宽),光纤放大器最快反应时间为16 μs。设计排种器排种口外形尺寸为25 mm×15 mm(长×宽),棉籽外径为3~8 mm,棉籽下落时间为0.05~0.2 s之间,通过试验验证选择的光纤传感器符合设计要求。
执行机构的设计:执行机构采用伺服系统,伺服系统由伺服电机、伺服驱动器等组成。根据系统负载要求,本文选用36SYK型伺服电机,自带编码盘,编码盘点数为200点,额定电压24 V,电机总长72 mm,直径36 mm,额定转矩85 Nm,减速比1∶23,符合设计要求。伺服器是用来控制伺服电机的一种控制器,本文选用的是MLDS3810型伺服控制器,伺服器实现了单片机与编码盘和伺服电机的连接,起到了信号的控制、接收和反馈作用。控制系统通过单片机输出一个电信号给伺服电机驱动器,伺服电机驱动器根据信号转化为相应的转速脉冲给伺服电机,编码盘把采集到的速度再反馈给伺服电机驱动器,与原来值进行比较输出更精确脉冲信号给伺服电机,整个系统形成一个闭环反馈系统,从而实现智能排种的目的。
主单片机的设计:主单片机本文选用了ALmega128单片机,是一款高性能、低功耗的8位AVR微处理器,它具有先进的RISC结构,资源内容更为丰富,接口强大,支持ISP在线编程,芯片可以反复擦写,调试非常方便,根据本设计控制系统所要实现的功能,需要对ALmega128单片机的端口进行分配,主要有五个功能的端口进行分配,一是键盘端口,PF0~PF3;二是行进速度采集端口,PE7:(ICP3)采用此端口定时/计数器3的输入捕获功能;三是播种量采样端口,PD4:(ICP1),采用此端口定时/计数器1的输入捕获功能;四是执行控制端口,PB4:PWM利用此端口的输出比较功能控制电机的转速,PB5:DIN,控制电机的正反转,;五是LCD1602液晶端口,PA0~PA7:D0~D7,LCD1602数据端口,PG2:EN,LCD1602使能端口,PG1:WR,LCD1602写指令端口,PG0:RS,LCD1602读状态端口。
2.2 往复摆动式智能精量排种机构
排种机构是播种机实现精量播种的关键部件,是保证播种质量的重要因素,如图3所示,设计的往复摆动式智能排种机构主要由往复摆动式取种盘、凸轮轨道槽、种室、36SYK型直流伺服电机、FFTQ-1025光纤传感器、FF-300光纤放大器等组成。取种盘周向布置18个摆动推块和种勺,如图4所示,转动到凸轮槽轮廓线a1处摆动推块,推块处于摆动槽底部,种勺张开,开始取种,转动到凸轮槽轮廓线a2处摆动推块,推块处于摆动槽底部,把种勺封住,转动到凸轮槽轮廓线a3处摆动推块逐渐向摆动槽底部运动,转动到凸轮槽轮廓线a4处的摆动推块到达摆动槽底部,种勺张开,完成排种,种子沿排种口a5排出,安装在排种口传感器把检测到种子的数据实时反馈给控制系统。

图3 往复摆动式排种盘示意图Fig.3 Schematic diagram of reciprocating swing seed plate1.取种勺 2.往复摆动推块 3.滚子 4.推块摆动槽 5.滚子轴 6.排驱动轴套

图4 往复摆动式排种盘轮槽示意图Fig.4 Schematic diagram of reciprocating swing seed plate
试验发现,设计的排种盘线速度Vp>0.8 m/s时,空穴率会大大提高,影响排种质量,排种盘线速度Vp与播种机行进速度Vm密切相关,两者关系
(1)
式中:D1——排种盘直径;
Z——排种盘勺数;
t——株距。
由式(1)可以看出,在排种盘直径、株距等参数不变时,Vp与Vm成正比。Vp达到一定值时空穴率会激增,这就限制了播种机的作业速度,从而降低了工作效率。如果增加种盘的勺数或者减小种盘的直径,可以使Vp减小到合适的速度,但是会缩短充种的距离,导致空穴率提高,因此,采用较大直径的种盘,可以提高充种系数,降低空穴率。
当地短季棉的农艺要求为90 000~120 000株/hm2,假设取最大值120 000株/hm2,行距按76 cm计算,则株距为:单位株数÷行距÷10 000=120 000÷0.76÷10 000=15.8 cm。假设排种盘线速度Vp取最大值0.8 m/s,排种盘的直径D1为25 cm,排种勺个数为18,株距为15.8 cm,行距为76 cm时,根据式(1),则播种机行走速度最大为:(0.8×18×0.158)÷(3.14×0.25)=2.89 m/s=10.04 km/min。
试验表明:设计的往复摆动式智能精量排种机构,结构简单,适应高速作业;空穴率降低,生产效率高。采用的FFTQ-1025光纤传感器、FF-300高性能双数显两路输出光纤放大器灵敏度高,可以把检测到的种子数据实时反馈到控制系统。
2.3 种肥隔离镇压塑形机构
2.3.1 种肥隔离镇压塑形机构工作原理
机具工作时,种肥开沟器带动土壤向上和两侧翻动,种肥隔离轮在开沟器翻动土壤的带动下绕铰链轴向上浮动,镇压塑性轮受到一个向下的力对播种带进行镇压,同时镇压塑形轮外轮缘围呈“凸”形,把播种带覆盖土壤表面塑成“凸”形,形成“下实上虚”的种子覆盖层,有利于保持土壤墒情,减少水分蒸发。同时种肥隔离轮也会受到镇压塑形轮的反作用力把开沟器翻出的土壤压碎覆盖种肥,防止烧种,并把地表层的秸秆推向播种带两侧。
2.3.2 种肥隔离镇压塑形机构设计
取种肥隔离镇压塑性机构(图5、图6)主要由镇压塑性轮、种肥隔离轮、种肥隔离镇压塑性支架和铰链轴等组成,镇压塑性轮由两个外轮缘带楔面的直径500 mm,轮缘厚度50 mm外轮缘呈楔形的铸铁轮组成,两个铸铁轮对置安装在种肥隔离镇压塑性支架的后部,轮缘表面成“凹”形;种肥隔离轮由两个直径150 mm,轮缘厚度30 mm的尼龙轮组成,两个尼龙轮安装在种肥隔离镇压塑性支架的轮叉上,两个尼龙轮距离为100 mm位于施肥开沟器的两侧;种肥隔离镇压塑性支架通过铰链轴安装在机架的吊耳上,与吊耳铰接。

图5 种肥隔离镇压塑形播种机构侧视示意图Fig.5 Linkage copying and pressing moulding mechanism side view schematic1.镇压塑性轮 2.镇压轮轮叉 3.吊耳 4.种箱 5.摆动式排种器 6.吊耳 7.机架纵梁 8.开沟器安装套筒 9.链接拉杆 10.轴套 11.种肥开沟器 12.双圆盘开沟器 13.种肥隔离轮 14.铰链轴

图6 种肥隔离镇压塑形播种机构俯视示意图Fig.6 Linkage copying and pressing moulding mechanism top view schematic1.镇压塑形轮组 2.镇压塑形轮轮叉 3.镇压塑性轮轴 4.伺服电机 5.伺服电机链轮 6.伺服电机固定架 7.光纤传感器 8.往复摆动式排种器 9.链接拉杆 10.套筒 11.种肥隔离轮 12.种肥隔离轮轮叉
本文研究的种肥隔离镇压塑形装置主要应用于棉花播种机上,应保证镇压作业能够满足棉花播种的农艺要求的最优值0.3~0.5kPa,并以此为依据进行总体设计,镇压塑形轮的直径对压实塑形质量有显著的影响,直径的减小,将会增加其水平推力,镇压塑形轮滚动性差;直径的增大,滚动阻力减小,镇压轮滚动性好,压实强度将下降。镇压塑形轮的直径应满足
(2)
式中:D——镇压塑性轮直径;
h——镇压塑性轮轮辙深度;
β——镇压塑形轮翻转角。
棉花播种镇压要求压实表层虚浮的土壤15~30 mm,此处值取15 mm,为保证镇压塑形轮正常工作,应使β≤20°,此处取20°。代入式(2)计算得出镇压塑形轮直径D=500 mm为宜[10]。
播种机进行播种作业时镇压塑形轮下陷量为2 cm,镇压轮曲面和地面有效接触长度为12 cm左右时,以平均接地压力公式计算。
(3)
式中:q——平均接地压力,取0.3~0.5 kPa,即棉花较佳的出苗镇压强度;
G——镇压塑形轮的自身重力和机架载荷;
M——镇压塑形轮的接地面积;
F——种肥隔离轮上浮对镇压塑形轮的下压力。
镇压塑形轮的受力面积为12 cm×10 cm(镇压塑性轮的宽度为10 cm)=120 cm2,镇压塑形轮的自身重量为15 kg,机架的重量20 kg,为满足上述0.3~0.5 kPa的农艺要求,种肥隔离轮上浮的反作用力不小于5~35 kg。
种肥隔离轮的作用主要是把施肥开沟器翻出的土壤压实并把表层秸秆分向两侧,所以对通过性要求不严格,轮子受力面积越小,力臂越短,效果越好,试验表明种肥隔离轮直径不小于150 mm的情况下均能正常作业。镇压塑形轮与地表的支点到铰链轴中心的力臂为600 mm,种肥轮与地表支点到铰链轴中心的力臂为600 mm,镇压塑形效果符合农艺要求,种肥隔离效果好。
2.4 分置式分层施肥装置
为了提高肥料利用率,改进和提高全肥一次性施肥技术,设计了分置式一次性分层施肥装置,苗肥8~12 cm,底肥15~25 cm,呈立体塔形分布,肥力持续供应。底肥开沟器深松土壤20 cm以上,可以打破犁底层,保持原土层不乱的情况下,调节土壤的固液气三相比例,使耕作层下面的土壤熟化,为作物生长发育创造适宜的土壤条件,促进根系发达,植株健壮[11]。工作时,底肥开沟器安装在机架前梁后部,肥料沿开沟器立柱下落到开沟器开出沟槽内,开沟器开出的土壤回落到沟槽内,覆盖肥料。清草刀轴顺时针旋转与机具前进方向相同,把挂在开沟器上的秸秆及杂草清理掉,防止拥堵的同时将开沟器开沟过程中形成的大土块打碎回落沟槽内。种肥开沟器安装在双圆盘开沟器的前端,同样,清草滚筒也会把挂在种肥开沟器上的杂草清理掉[12]。种肥开沟器在旋松的土壤内行走,种肥开沟器把肥料施至地表下10~12 cm。试验表明:采用底肥与种肥分层使用,满足了棉花整个生育期对养分的需要。此方式打破了常规分期施肥的传统模式,减少了集中施肥挥发损失,增加了产量,减少生产环节,达到“省工、省时、省费用”的目的。
3 整机技术参数田间试验
3.1 试验地点及材料
2020年5月26日,在山东绿风农业集团无棣县柳堡镇“草棉轮作”种植基地进行了田间生产试验。基地种植的燕麦草品种冬牧-70于2020年3月1日播种,5月25日收获,试验地块燕麦草鲜草产量平均为512 360 kg/hm2,在刈割压扁、打捆收获后根茬覆盖的地表进行棉花精量播种试验。机具配套动力为福田雷沃欧豹8200拖拉机,作业速度3~5 km/h。试验条件设置情况见表2。
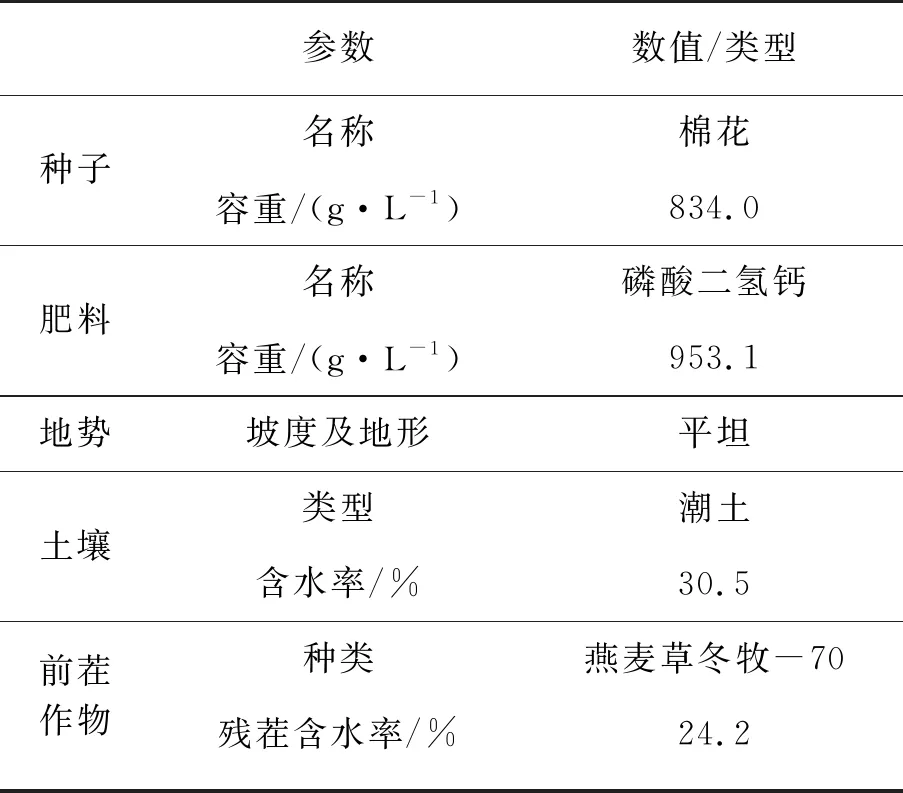
表2 试验条件明细表Tab.2 Details of test conditions
3.2 试验方法
试验参照JB/T 10293—2001单粒精密播种机技术条件、GB/T 6973—2005单粒精密播种机试验方法、GB/T 200865—2007免耕施肥播种机国家标准进行,北斗导航系统采用天津天宝伟业科技有限公司的企业标准:Q/010HTB01—2019,试验用种子为短季棉品种鲁532,千粒重为95 g,含水率为13.1%,播种量为19 kg/hm2;肥料为299 kg/hm2,检测设备包括断面测绘仪、卷尺、标杆和秒表等。
3.2.1 测区的测定
在播种作业区内任取对角线中的一条,将对角线分为6段,分别以两个端点外的其他5个等分点为中心点选取测区,测区宽度为1个工作幅宽,长度为5 m,共选定5个测区。
3.2.2 种子覆土深度的测定
各小区内每行测5点,计算各行与整机的平均覆土深度的合格率。合格率是指覆土深度在h±1 cm(播深小于3 cm时为h±0.5 cm)范围内的点占总测定点的百分数。h为当地播种要求的覆土深度,覆土深度也可在出苗整齐后进行测定。
3.2.3 播种均匀性的测定
调整播种机的开沟器,在开沟器不入土的情况下,作业一个行程,将种子播在土壤细碎、无秸秆、平整的地表上,不覆土。至少测定5行,少于5行全测,每行连续测定所播种子的穴距穴粒数,各测10个。按式(4)、式(5)计算空穴率和穴粒数合格率(合格穴粒数为1~2粒)。
(4)
(5)
式中:S——穴粒数合格率;
K——空穴率;
mk——空穴数;
M——总测定穴数;
z——穴粒数总合格穴数。
3.2.4 播种行直线度
装有自动导航系统的拖拉机在平整硬质田地或平整硬质地面上进行自动导航作业时基站与接收机距离不小于5 km,至少完成一次设定衔接行的作业。卫星接收机的安装位置位于该农业机械的纵向中性线上,安装高度应贴紧地面,在自动驾驶作业过程中利用第三方高精度卫星接收机记录自动导航作业的两点坐标,,以两点坐标连接线为基准线,按照不小于60 m和300 m的直线导向路径在速度(0.5±0.2m/s)和(2.5±0.2m/s)下按设定衔接行间距作业,各行使1次;用第三方高精度卫星接收机记录的RTK位置数据,xi作为实际行使轨迹点到基准线的距离,每次取30个检测点,测量机械自动导航系统实际距离,利用计算公式(6)计算得出每种作业速度下机械自动导航系统实际距离与基准线的距离的标准差,该标准差即为直线度。
(6)
式中:xi——实际行使轨迹点到基准线的距离,cm;

N——所取得检测点点数;
s1——播种行直线度,cm。
3.2.5 衔接行间距精度
装有自动导航系统的拖拉机在平整硬质田地或平整硬质地面上进行自动导航作业时基站与接收机距离不小于5 km,至少完成一次设定衔接行的作业。卫星接收机的安装位置位于该拖拉机的纵向中心线上,安装高度应贴紧地面,在自动驾驶作业过程中利用第三方高精度卫星接收机记录自动导航作业的两点坐标,以两点坐标连接线为基准线,按照不小于60 m和300 m的直线导向路径在速度(0.5±0.2 m/s)和(2.5±0.2 m/s)下按设定衔接行间距作业,至少完成2次调头作业,用第三方高精度卫星接收机记录的RTK位置数据,作为实际位置。在第一条轨迹线中记录行使轨迹点Ai(从1~30等间距记录轨迹点)在第二条轨迹线中记录行使轨迹点Bi(从1~30等间距记录轨迹点),Ai,Bi要对应
(7)
式中:hi——轨迹线1和轨迹线2的相对间距,cm;
h——两条轨迹线相对间距平均值,cm;
N——所取得检测点点数;
s2——接行间距精度,cm。
3.3 试验结果与分析
依据上述测试计算方法,分别以每10个作业区的测定平均值为测试结果,采集数据汇总分析结果见表3。

表3 试验数据统计表Tab.3 Statistical table of test data
由试验数据可知,播深合格率为92.5%,衔接行间距精度1.2cm,播种行直线度0.8cm,播种深度平均为2.8cm。各项性能指标达到了设计要求和相关农业行业标准要求,机具在田间试验整体作业效果良好,符合饲草―短季棉连作宽行密植机械化采收种植模式的农艺要求,且该机具操作方便,作业性能稳定、工作效率高。该机在秸秆覆盖量大的情况下,通过性能很好,播种后出苗率高、苗齐、苗壮。在不追肥的情况下整个生长期无早衰现象。
3.4 北斗导航智能播种模式与传统播种模式对比试验分析
2019—2020年山东省无棣县北斗导航智能播种模式与传统播种模式对比试验情况见表4,综合2019年和2020年的实测产量北斗导航系统智能播种模式比对照区增产约469.45 kg/hm2,增幅9.94%;在对照区面积相同的(同为1 hm2)的情况下,采用北斗导航播种机播种棉花行数由采用常规播种的80行增加到84行,相当于增加4行棉花的面积,土地利用率增加4÷80=5%,有效铃数增加13.05%。

表4 2019—2020年山东省无棣县北斗导航智能播种与传统种植模式对比试验情况表Tab.4 Comparison test between intelligent seeding and traditional planting pattern in Beidou navigation system Wudi County,Shandong Province from 2019 to 2020
4 结论
1)通过性能试验可知采用北斗导航自动驾驶保障作业质量,作业后的衔接行准确,播行端直,提高衔接行的精准度和播行的直线度,土地利用率提高5%,为后续田间标准化作业奠定了基础,实现播种施肥精准控制,节种节肥。播深平均为2.8 cm;播深合格率为92.5%;衔接行间距精度为1.2 cm;播种行直线度为0.8 cm。
2)设计的智能排种施肥控制系统实现了排种、排肥量的实时控制。设计的分置式施肥开沟装置实现肥料分层施用,设计的种肥隔离镇压塑形机构,实现了种肥有效隔离,镇压塑形效果显著。每组播种单体采用浮动式链接,提高播深一致性;满足沿海盐碱地饲草—短季棉连作区棉花无膜栽培的发展需要和土地规模化经营背景下对播种机具的需求,具有很好的推广应用前景。