基于模型的飞机系统架构多视图表达方法
2021-11-10康文文李浩敏
康文文, 李浩敏
(上海飞机设计研究院, 上海 201210)
0 引 言
飞机系统是典型的复杂系统,从传统的研制方法向“基于系统工程的正向设计方法”的转变遇到了很多困难;其中一个典型困难是“缺乏有效的飞机系统架构设计表达方法”。
根据系统工程方法[1-6]的指导,飞机系统设计的关键步骤是“架构设计综合”,需要对整机各系统进行架构集成和全局性的权衡分析;传统进行飞机系统架构原理性设计的方法是采用二维画图工具,但飞机上有30多个大系统,140多个子系统,数千种设备[7],二维画图工具无法有效应对如此大规模的系统架构制图,更加无法支持多系统架构的综合性分析。
飞机系统架构设计的典型复杂特征是:
(1)多层级,包括飞机级、系统级、子系统级、设备级等;
(2)多系统集成,包括液压系统、飞行控制系统、自动飞行系统、机轮刹车系统、电源系统等;
(3)多接口形式,系统设备间接口形式包括信号、物质、能量等;
(4)多专业合作,包括总体系统综合专业和各系统专业等,不同专业对飞机系统架构设计的关注点不同。
限于这些复杂特征,单独采用一张视图无法有效描述飞机系统架构的设计结果;传统设计方法中通常会采用多张离散的二维架构图对全局系统架构进行描述,这种架构设计方法造成了很多问题,其中一些典型的问题包括:
(1)同一个系统的多张离散系统架构图中的设计元素需要交叉参考,但由于设计元素众多,多张架构图之间很难保持协同;
(2)随着设计的深入,每个系统的设计元素都在不断增多,设备定义不断细化分解,系统架构图需要不断更新,多张架构图的更新难以保持协同;
(3)为开展某种综合性的系统性能分析,比如整机液压能耗分析时,需要从多个系统的架构图中抽取设计信息,但基于离散的架构图进行信息抽取时效率很低,且容易出错;
(4)在开展全局性的安全性分析[8-9]时,需要基于清晰的整体系统行为逻辑和接口关系,但散落在数百张系统架构图中的接口关系非常繁杂,极大降低了安全性评估的置信度;
(5)在多专业合作进行跨系统集成时,各系统专业普遍会为接口系统专业提供一张完整的 “系统架构大图”,包含本系统的大部分设计特征比如能源形式、信号形式等,但由于“系统架构大图”的信息量过于庞大且不支持筛选,进入到详细设计阶段后,各系统的大图往往会复杂到无法使用。
多张离散的二维架构图已经是“飞机复杂系统架构的多视图设计表达方法”的雏形,但由于离散性,这些架构图并不能有效应对飞机系统架构的多层级、多系统集成、多接口形式、多专业合作等困难特征;对离散二维架构图的制作和应用最终都转化为飞机系统架构综合设计中巨大的工作量。
一个有效的“飞机复杂系统架构的多视图设计表达方法”的内涵是:飞机复杂系统架构的功能、设备、接口等架构元素的定义和引用应该是统一的,而多系统集成架构的设计应该是由粗到细协同进行的,不同的架构元素之间应该是具备关联关系的,在开展各项设计分析时,可以从统一和协同的系统架构中抽取必要元素以准确的生成目标分析视图。
多视图设计表达的创新点和价值在于,把复杂的飞机系统架构设计任务分解为多个图层以降低每个图层上的设计和分析难度,同时保持各图层上架构元素定义的一致性,支持后期多个设计图层的合并和系统架构的集成。
为支持飞机复杂系统架构多视图设计表达方法的落实,需要采用基于模型的手段。
传统的飞机系统架构建模方法主要是数值建模方法,包括Modelica或Simulink建模等;传统建模方法的对象是系统物理架构,由具体设备和组件构成;传统建模方法的强项在于系统性能的数值仿真,但并不能解决飞机总体专业的多系统设计表达问题;需要引入更加抽象和形式化的建模方法以支持飞机多系统架构集成的设计表达,使飞机总体专业在多系统综合设计方面获得明确的设计分析对象,即“整机系统架构框架模型和多系统架构集成细节模型”。
Andersson介绍了飞机系统建模的多种方法,包括系统建模语言(systems modeling language,SysML)建模和Modelica建模等[10]。Bergman针对能量优化飞机进行了系统架构的建模和权衡研究[11]。Lemazurier研究了将需求映射到系统功能架构的方法[12]。Mavris等人指出飞机新功能和系统新技术的发展导致飞机系统架构的快速演变,并研究了从飞机级功能直接推导出可行物理架构的方法,以支持进行半自动化的权衡分析[13]。浦乐等人针对SysML建模在导弹系统设计[14]、动车组系统设计[15]、飞机健康管理系统设计[16]、发动机控制系统[17]、综合模块化航电[18]、机载系统可靠性和安全性分析[19-20]中的应用进行了研究。这些研究从不同角度指出了基于模型开展系统设计的可行方法,但均没有指出解决飞机系统架构高复杂性的处理机制,也没有应用“多视图”的架构设计理念,无法解决本文中的目标问题,即“飞机总体专业缺乏多系统架构集成设计和表达的方法”。
本文采用SysML建模语言[21],提出了“基于模型的飞机复杂系统架构多视图设计表达方法”,可以有效应对飞机系统架构设计的多层级、多系统、多接口形式、多专业合作等特征,有效支持飞机系统的正向设计。
1 架构设计的难点和多视图策略
1.1 飞机系统架构设计结果的复杂性
飞机系统架构设计结果往往具有很高的复杂性。比如,飞机地面减速功能的实现需要多个飞机系统的协作,地面减速的飞机级综合系统架构如图1所示。
如图1所示,飞机级功能比如地面减速功能由多个飞机系统共同实现,体现为多系统间密切的信号交联和能量交联关系;飞机系统架构设计存在典型的多系统集成特征。

图1 地面减速飞机级综合系统架构
机轮刹车系统是地面减速飞机级综合系统架构中的一个典型飞机系统,承担着飞机着陆后的主要减速任务;如果飞机高速着陆后不能有效减速将会造成机毁人亡的情况。机轮刹车系统的系统级集成架构如图2所示。为保持简洁清晰,机轮刹车系统的集成架构图中隐去了部分接口、设备等信息。

图2 机轮刹车系统的系统级集成架构
如图2所示,机轮刹车系统的系统级架构受到地面减速飞机级综合系统架构的接口约束,飞机系统架构设计呈现典型的多层级特征;飞机机轮刹车系统集成架构中包含多种设备,其接口形式包括液压接口、电源接口、信号接口等,飞机系统架构设计存在典型的多接口形式特征。
在飞机研制工程单位,飞机级的系统架构设计由总体系统综合专业负责,各系统比如机轮刹车系统的架构设计由刹车专业负责;总体系统综合专业需要对各系统专业的系统架构设计结果进行集成和权衡分析,各系统专业之间需要就接口的具体内容、形式、性能等进行协同设计;飞机系统架构设计呈现典型的多专业合作特征。
1.2 多视角飞机系统架构设计过程的复杂性
飞机系统架构设计通常包含功能架构和物理架构设计过程,以及针对功能架构和物理架构的多种设计分析过程;为保证过程清晰,通常会将飞机系统架构设计过程分为功能视角和物理视角。
功能视角设计是系统工程方法给出的重要指导,要求在开展目标系统的物理架构方案设计前进行充分的问题域分析,明确目标系统的功能内涵、功能边界和应对各种运行场景的功能逻辑。物理视角设计是传统飞机系统架构设计的重点,主要定义系统物理架构和相应设备的产品规范,支持系统设备采购或者新研。
每个视角中需要开展的飞机系统架构设计和分析工作和不同视角之间的设计数据交互如图3所示。
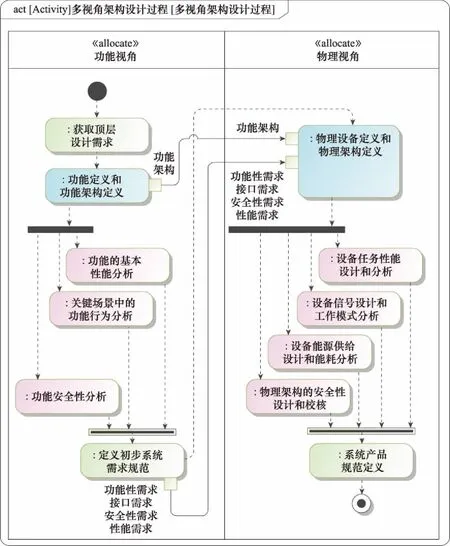
图3 多视角的飞机系统架构设计过程
如图3所示,功能架构定义和物理架构定义的工作需要与接口分析、性能分析、安全性分析、能耗分析等工作充分协同;架构设计过程不同步骤的协同性要求与飞机系统架构设计的多层级、多系统集成、多接口形式等特征交织在一起,呈现出很高的复杂性。
1.3 飞机系统架构设计的难点
飞机系统架构设计过程和结果的复杂性,导致飞机系统架构设计中存在多个难点。
(1)单系统设计和分析已经比较困难
飞机的每个单系统比如机轮刹车系统,其复杂性和综合程度已经很高。由于缺乏有效的架构设计表达和数据协同方法,不同角度的设计工作经常出现不同步的情况。
(2)跨系统综合分析更加困难
在系统综合设计中,不可避免会出现系统间设计不兼容的情况,由于缺乏有效的架构设计表达和数据协同方法,在多张离散的二维架构图中发现错误和更正错误的难度越来越高,导致最终系统间存在很多细节的设计兼容性问题。
(3)规范的飞机系统架构设计过程难以落实
在缺乏有效架构设计表达方法和架构数据协同方法的情况下,多层级、多系统、多接口形式的飞机系统架构设计过程很快就会出现层级模糊、系统界面混乱、系统接口缺乏控制的情况。
1.4 飞机系统架构设计的多视图策略
需要引入多视图策略,以响应飞机系统架构设计众多利益攸关方的共同诉求:
(1)需要从不同的角度以多视图的形式对系统架构进行相对独立的描述,且这些不同的视图可以自动化关联并集成在一起,以形成统一且完备的飞机系统架构;
(2)飞机系统架构的视图应支持不断的细化,同时保持架构设计元素之间的约束关系,包括分解关系、接口连接关系等;
(3)遵循规范的飞机系统架构设计过程,可以从统一且完备的飞机系统架构中按需生成特定的分析视图,比如跨系统的液压综合架构视图等。
对多视图策略的应用,需要引入“多视图建模方法”。在飞机系统架构设计过程的约束下,通过“多视图建模方法”进行局部设计,再通过视图自动化集成构建“统一且完备的飞机系统架构模型”;针对飞机系统架构模型,一方面采用多视图方法继续进行细化设计和建模,另一方面基于已有的架构模型抽取必要的元素,搭建分析视图并开展架构设计分析。
通过多视图架构建模方法将飞机复杂系统设计进行拆分,在保持架构元素统一定义和引用的基础上,对多层级(飞机级、系统级、设备级)、多系统(液压系统、机轮刹车系统等)、多接口形式的系统设计工作进行解耦,将每个视图下的架构设计和建模工作都局限到某个特定层级、特定系统和特定接口形式,充分降低每个视图下的系统架构设计的复杂性;通过降低每张视图上架构设计的复杂性,形成更加清晰的设计边界,支持多专业的有效合作,支持规范的飞机系统架构设计过程的落实。
2 基于模型的多视图架构设计表达方法
2.1 SysML建模语言简介
SysML建模语言中支持飞机系统架构建模的主要是“块定义图”和“内部块图”,以及与这两种图兼容的“块”“接口”等架构建模元素。
“块”是SysML语言的一个通用概念,用于对有内部结构的实体进行描述,包括系统、硬件设备、软件或者其他物理对象等。“块定义图”可以用于捕获“块”之间的关系,包括“块”的层级结构等。
“接口”是SysML语言中经常与“块”一起使用的建模元素,用于对“块”之间的接口关系进行明确,比如信号接口、物质接口和电气接口等。
“内部块图”描述一个高层级“块”的内部“组成部分”(由“块”进行类型定义)之间的交联关系,通过有方向的接口传递不同系统组成部分之间的交互,包括物质、信号和能量等。
“块”可以代表目标系统,“系统块”内部组成部分的不同形式的接口交联关系,可以采用不同的内部块图进行表达,即多视图表达;每张内部块图只表达相应视图所关心的内容;系统内部的所有组成部分的所有交联关系可以在同一个内部块图上进行集中呈现,即“多视图集成”。
块定义图和“块”“接口”等架构建模元素如图4所示。

图4 块定义图和架构建模元素示意图
如图4所示,“系统块”可以被分解为“子系统1”和“组件1”,“子系统1”可以被分解为“组件2”和“组件3”;系统接口包括信号、物质和能量(电能)等形式。
内部块图和接口交联关系的示意如图5所示。
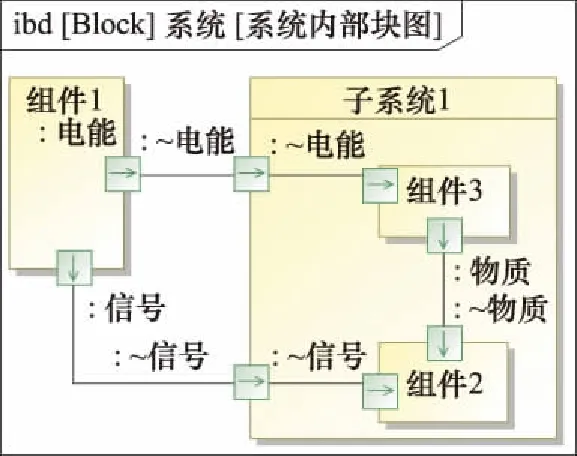
图5 内部块图和接口交联关系示意
如图5所示,“系统块”内部各组成部分的接口交联关系可以通过“接口”之间的连接线进行描述;内部块图可以反映多层级的系统架构接口关系。
将SysML架构建模语言应用到飞机系统架构设计过程,可以实现基于模型的飞机复杂系统架构多视图设计表达方法。
2.2 基于模型的多视图设计表达方法
2.2.1 多视图架构建模的基本规则
基于SysML模型实现飞机复杂系统架构的多视图设计表达方法,基本规则主要包括:
(1)使用SysML架构建模元素“块”描述飞机系统的功能、系统、软件和硬件设备;
(2)使用块定义图上“块”的分解关系描述飞机系统的功能分解、系统设备分解等;
(3)使用同一个“块”的不同内部块图描述飞机系统架构的“多视图独立设计”;
(4)通过同一个“块”的不同内部块图的合成机制实现飞机系统架构的“多视图设计集成”;
(5)通过对飞机系统内部块图上的架构元素进行筛选,实现特定分析视图的构建。
比如针对机轮刹车系统进行架构设计和建模,可以定义多个视图,包括但不限于控制信号架构视图、液压供给架构视图、输入输出信号架构视图、状态反馈信号架构视图、电源供给架构视图、软硬件设备级架构视图、集成架构视图等。
2.2.2 飞机系统架构的多视图建模过程
对多视角的飞机系统架构设计过程中的架构定义部分进行建模实现,并考虑各视角下的多视图划分原则,飞机复杂系统架构的多视图建模过程如图6所示。
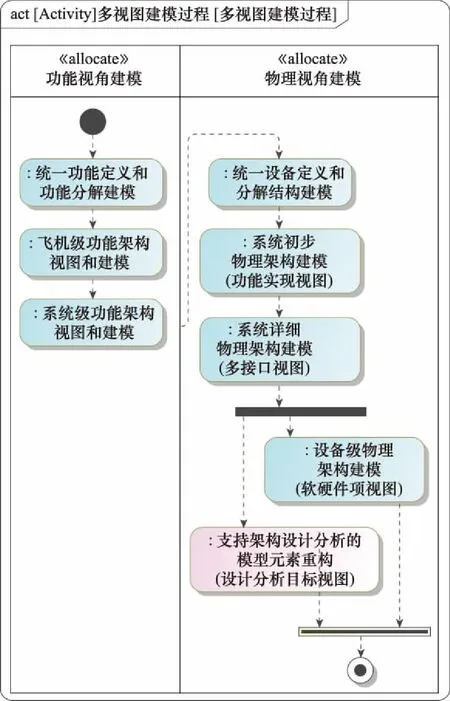
图6 飞机系统架构的多视图建模过程
如图6所示,在功能视角建模和物理视角建模中,首先要开展的是“统一功能定义和功能分解建模”和“统一设备定义和设备分解结构建模”,统一的架构元素分解结构定义是后续多层级、多系统、多接口形式系统架构有效集成的基础。
2.2.3 多视图划分原则和具体建模方法
功能视角下的飞机系统功能架构设计是抽象层面的设计,只进行多层级的视图划分,即飞机级功能架构视图和系统级功能架构视图。
功能架构建模需要首先使用块定义图进行飞机级和系统级的统一功能定义和功能分解结构建模,如图7所示。
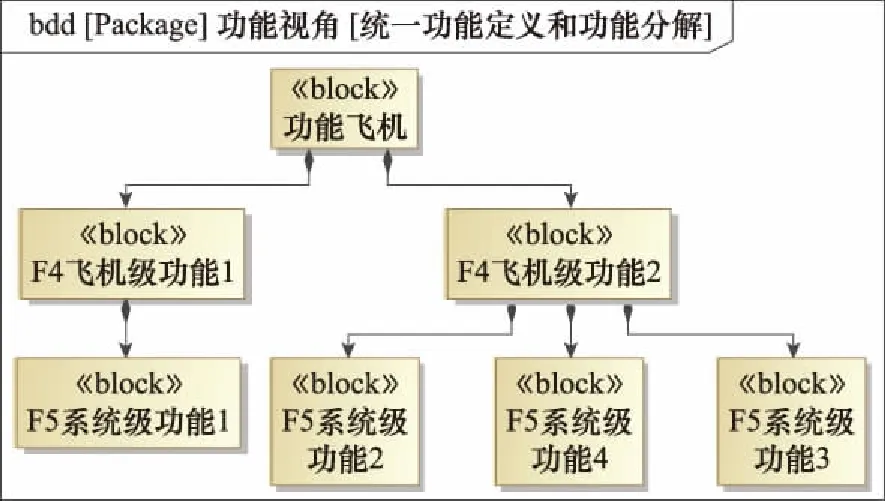
图7 统一功能定义和功能分解结构
如图7所示,针对“功能飞机”,可以统一进行飞机级功能和系统级功能的清晰定义,通过块定义图可以清晰呈现飞机级功能和系统级功能之间的分解结构。
“功能飞机”的飞机级功能架构采用内部块图进行建模,如图8所示。
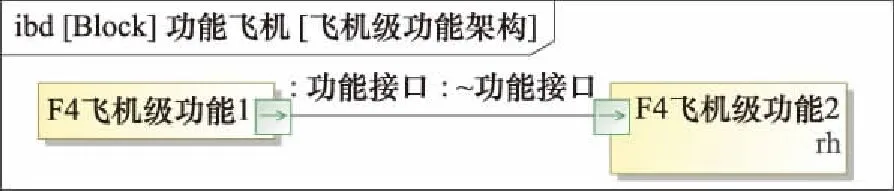
图8 飞机级功能架构
飞机级功能架构模型可以清晰描述飞机级功能之间的接口交联关系。
飞机级功能架构中,“飞机级功能2”的系统级功能架构模型如图9所示。
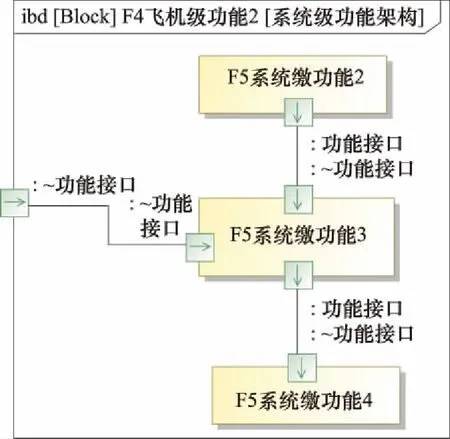
图9 系统级功能架构
如图9所示,系统级功能架构模型可以清晰描述某一个飞机级功能下的系统级功能之间的接口交联关系;同时系统级功能的接口交联关系需要受到飞机级功能接口的约束。
物理视角中,需要引入物理技术方案并进行功能到设备的分配,存在多种视图划分机制:
(1)以某项系统功能的完整实现为划分原则;
(2)以接口形式的不同类别为划分原则;
(3)以具体的设计分析目标为划分原则;
(4)以软件和硬件项为划分原则。
以某项系统功能的完整实现为划分原则时,在该视图中对系统功能涉及到的所有物理设备和软件及其之间的接口交联关系进行初步定义;该视图划分原则通常在进行飞机系统初步物理架构设计时选用。初步物理架构设计时,需要首先进行统一的设备定义和分解结构建模,如图10所示。

图10 统一设备定义和分解结构
如图10所示,通过块定义图可以清晰地呈现飞机系统物理设备的统一定义和分解结构。
“系统2”用于实现“飞机级功能2”以及相应的“系统级功能2、系统级功能3和系统级功能4”,其中“设备4”实现“系统级功能3”,“设备3”实现“系统级功能2”和“系统级功能4”,可以采用内部块图对“系统2”完整实现“飞机级功能2”的初步物理架构进行建模,如图11所示。
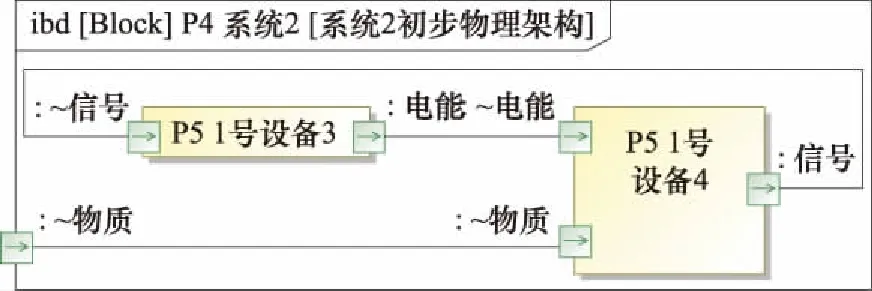
图11 系统2初步物理架构
如图11所示,飞机系统的初步物理架构模型可以清晰描述相应飞机级和系统级功能的完整实现;具体的,功能由设备实现,而功能架构中的功能接口可以被初步物理架构上的物理接口进行实现。
以接口形式的不同类别为划分原则时,在每张视图中对特定形式的接口架构进行描述;该视图划分原则通常在进行飞机系统详细物理架构设计时选用,尤其是在引入架构安全性设计特征比如冗余机制后。
在开展飞机系统的详细物理架构设计时通常会引入冗余机制,系统设备间的接口会变得非常复杂,此时需要对物理架构进行不同接口形式的视图划分。
“系统2”详细物理架构的信号接口视图、物质接口视图、电能接口视图模型如图12所示。
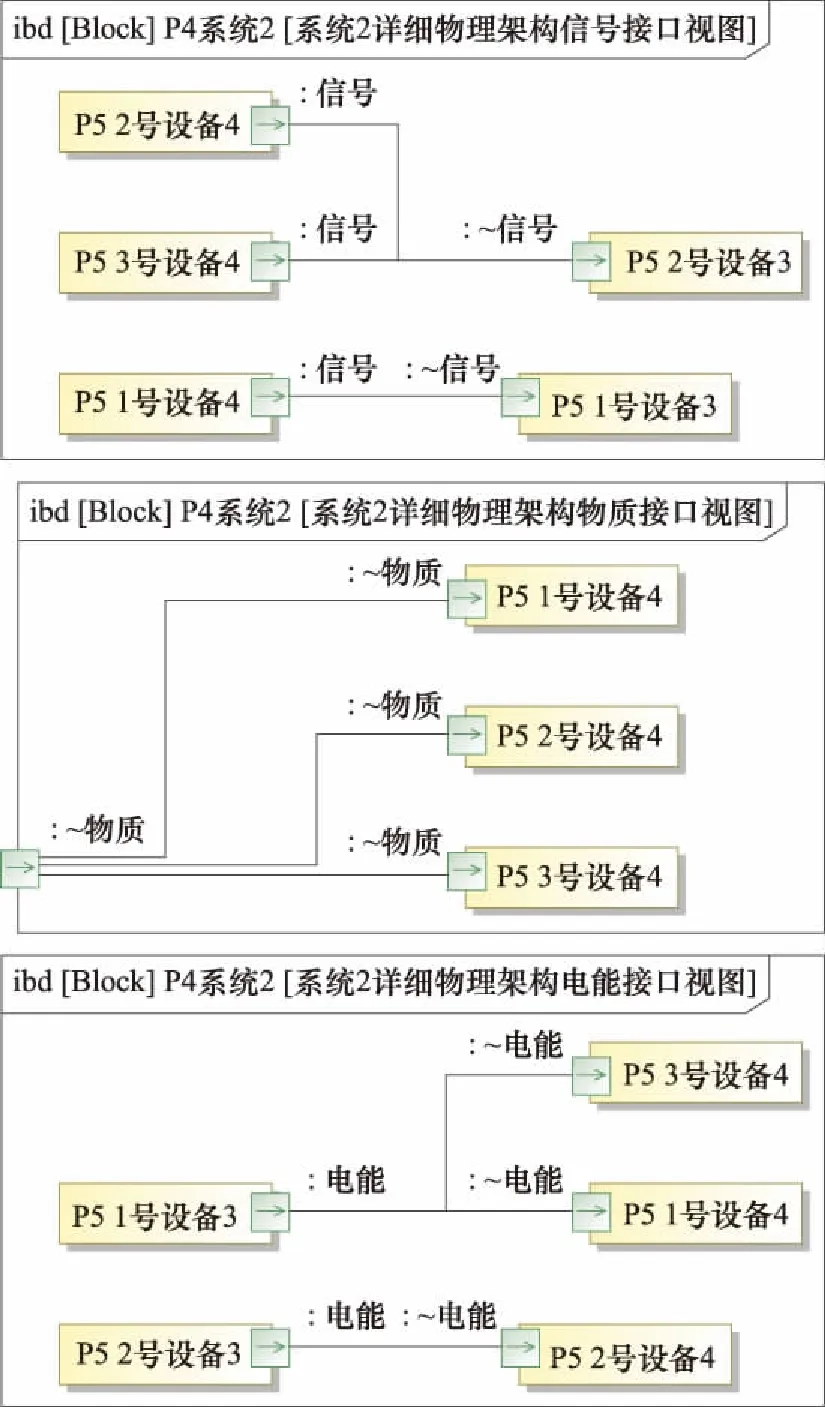
图12 系统2的不同接口形式视图
如图12所示,在划分不同的接口形式后,各接口形式视图中的架构模型可以保持简洁清晰的表达效果。
在完成详细物理架构的多接口视图建模后,实际上已经构建了“系统2”的详细物理架构模型;对“系统2”详细物理架构模型的架构元素进行重构,即可得到“系统2”的集成架构视图,如图13所示。

图13 系统2详细物理架构集成视图
如图13所示,在完成某系统的不同接口形式视图的架构设计和建模后,可以对各接口形式的视图进行“合并”,形成系统详细物理架构的集成视图。基于系统的集成架构视图,可以开展系统的全局初步安全评估等设计分析工作。
以具体的设计分析目标为划分原则时,在每张视图中抽取与设计分析目标相关的系统架构元素;该视图划分原则通常在进行飞机系统的设计分析和多种架构的权衡分析时选用。
比如在针对“物理飞机”的“物质消耗”特性进行分析时,需要抽取“系统1”和“系统2”中的相关架构元素,构成“物质消耗分析视图”,如图14所示。
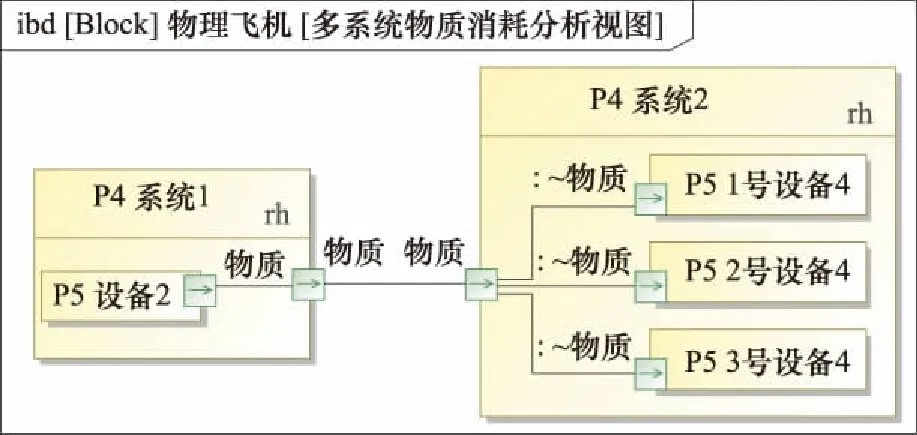
图14 多系统物质消耗分析视图
如图14所示,在完成各飞机系统的详细物理架构设计和建模后,可以针对特定的设计分析目标,抽取必要的架构元素重构为特定的分析视图模型。该分析视图可以被导入到专业仿真分析软件中,作为仿真模型建立的框架约束。
以软件和硬件项为划分原则时,需要考虑具体的计算机设备、具体的总线类型等;该视图划分原则通常在进行飞机系统的最终设备级物理架构方案定义时选用,支持飞机系统产品规范的定义。
在完成飞机系统的详细物理架构设计和分析后,可以为飞机系统定义软件和硬件构型项,支持最终飞机系统物理架构方案的定义。
典型情况下,“系统2”的“设备3”由“控制计算机”实现,“设备4”由“作动器”实现,“设备3”的两个功能(“系统级功能2”和“系统级功能4”)分别由“应用软件1”和“应用软件2”实现,“系统2”的软硬件构型项定义模型如图15所示。
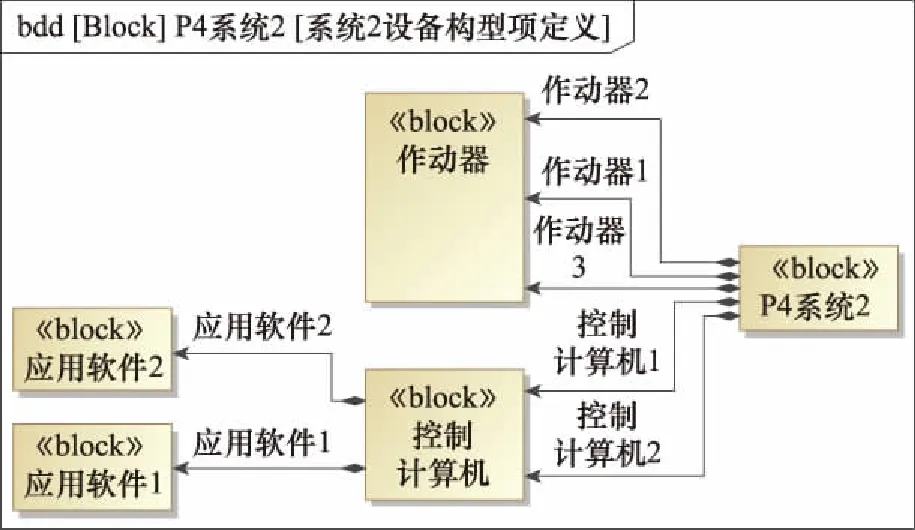
图15 系统2的软硬件构型项定义
如图15所示,飞机系统在完成详细物理架构设计和分析后,可以通过软硬件构型项定义模型描述飞机系统的配置方案。
基于系统构型项定义模型,可以进一步明确构型项之间的接口形式,比如“系统2”软硬件架构模型的“总线端口”视图如图16所示。
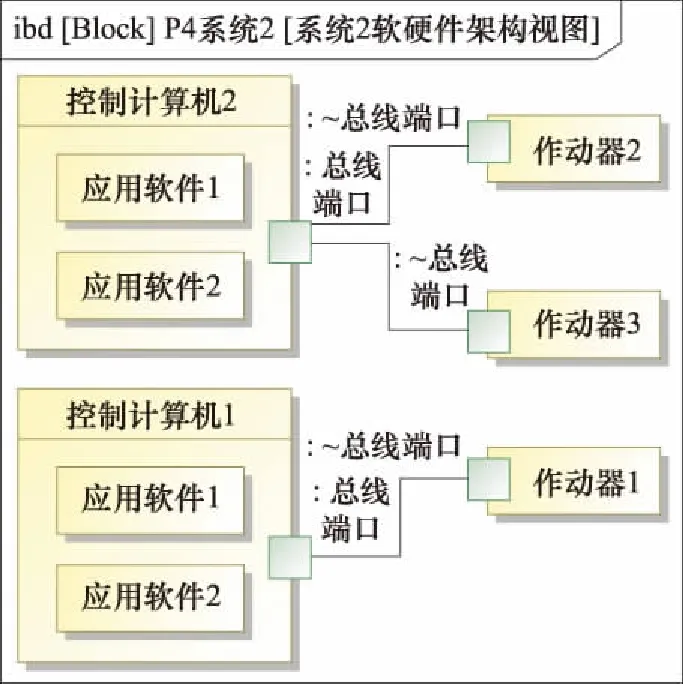
图16 系统2软硬件架构总线端口视图
如图16所示,飞机系统的软硬件架构视图可以清晰描述软硬件配置项之间的各种形式的端口连接关系,包括总线连接关系等。
在完成飞机系统架构的多视图建模过程后,即得到飞机系统“统一且完备”的物理架构设计模型;基于统一的飞机系统架构模型,可以开展多种形式的系统架构集成视图的构建和分析。
2.2.4 基于多视图模型的多系统架构集成
基于多视图的飞机系统架构模型,可以开展飞机级的多系统架构设计集成。
针对“物理飞机”,在完成各系统的详细物理架构设计和建模后,可以构建飞机级的详细物理架构集成视图,如图17所示。
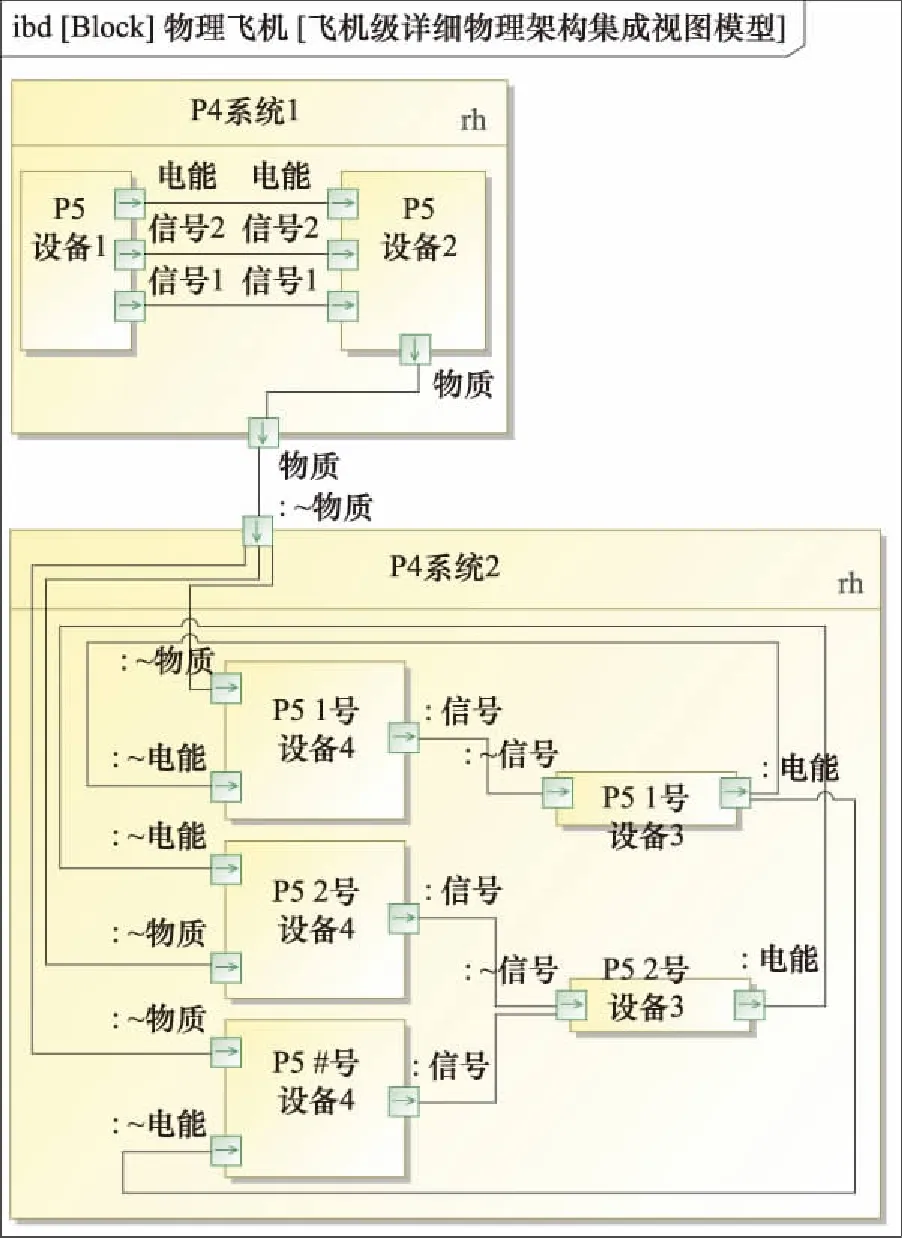
图17 飞机级详细物理架构集成视图
如图17所示,飞机级详细物理架构集成视图模型可以清晰描述不同系统间的交联关系,可以有效支持飞机级的多系统虚拟集成。
通过贯彻多视图建模过程和多视图划分原则,多层级、多系统、多接口形式的飞机复杂系统架构设计可以在多张相互关联和协调的简洁视图中被充分解耦并降低复杂性;各专业可以在“统一系统架构模型”的不同视图中协同开展工作,明确的界面和清晰的接口,可以支持有效的多专业合作。
3 飞机机轮刹车系统的多视图架构设计
根据飞机系统架构的多视图建模过程,本节以飞机机轮刹车系统为例,给出基于模型的飞机复杂系统架构多视图设计表达方法的应用实践。
3.1 飞机机轮刹车系统简介
机轮刹车系统与地面扰流板系统和发动机反推系统共同实现飞机级的“地面减速功能”,其中,机轮刹车系统的系统级功能包括人工刹车功能、自动刹车功能和防滑保护功能。
机轮刹车系统主要由驾驶舱操纵部件、刹车控制单元、液压作动器以及压力/温度传感器等组成。
3.2 机轮刹车系统的多视图架构设计
根据“不同类别的接口形式”多视图划分原则,机轮刹车系统的物理架构设计过程如下。
(1)根据选定的技术方案,机轮刹车系统的统一设备定义和分解(部分)如图18所示。
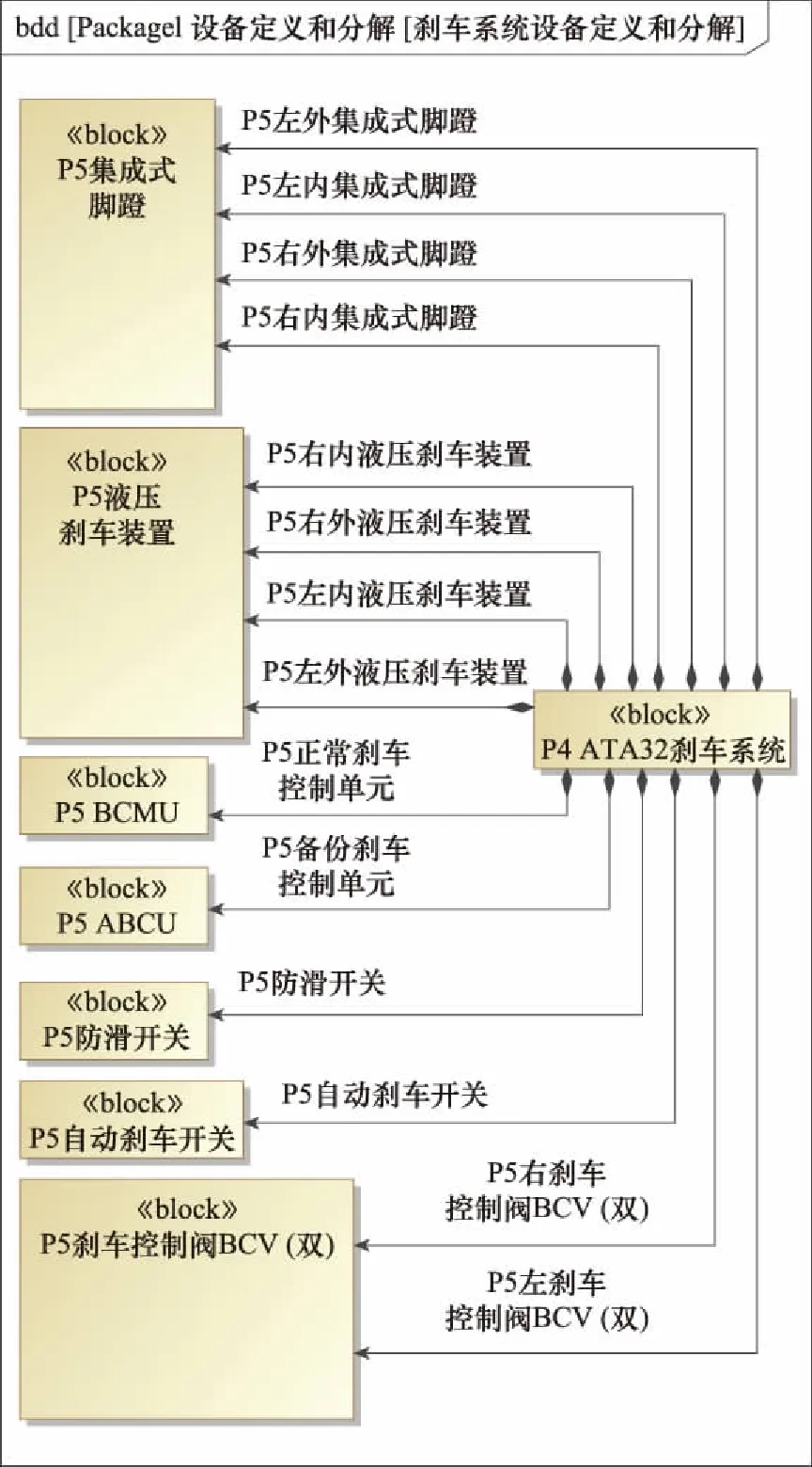
图18 机轮刹车系统统一设备定义和分解
(2)根据多视图划分原则,机轮刹车系统的控制架构视图模型如图19所示。

图19 刹车系统的控制架构视图
刹车控制单元输入输出信号的架构视图模型如图20所示。
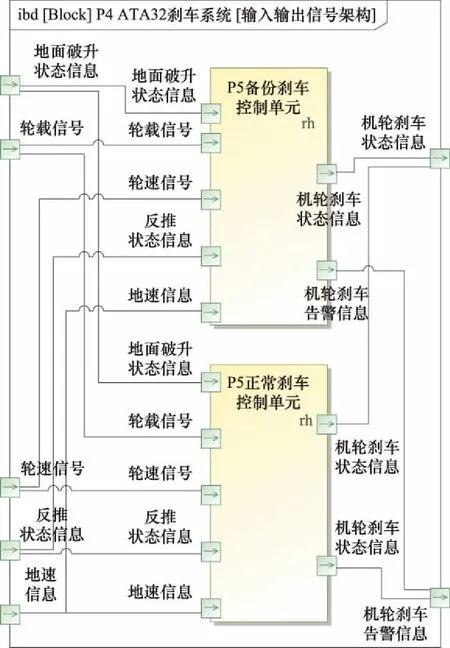
图20 刹车控制单元输入输出信号架构视图
3.3 机轮刹车的单系统集成和多系统集成
在完成机轮刹车系统的多视图架构建模后,可以实现机轮刹车系统的系统级架构集成,如图2所示。在完成机轮刹车系统和相关接口系统比如液压系统和指示记录系统的多视图架构建模后,本质上就已经完成了“多系统集成架构”的设计;可以对飞机整机系统架构模型进行重构,形成飞机级机轮刹车系统的集成架构视图,如图1所示。
基于飞机级机轮刹车系统的集成架构模型,可以开展多项设计分析,比如多方案的整体架构权衡、机轮刹车系统的性能参数分析以及飞机级的架构安全性评估等。
3.4 机轮刹车系统的多视图架构设计小结
通过对基于模型的飞机复杂系统架构多视图设计表达方法的应用,飞机机轮刹车系统的架构设计过程呈现出以下特点:
(1)通过贯彻统一的架构元素定义和分解,飞机级、系统级、设备级、软硬件级的架构可以不断细化设计,可以充分保持多层级架构间的设计一致性;
(2)通过贯彻“自顶向下”的架构设计和建模过程,机轮刹车系统与液压系统、起落架系统等可以协同开展设计和建模,并实时完成当前整机系统设计状态的集成;
(3)通过统一的接口定义和多视图划分原则的应用,带有冗余特性的机轮刹车系统的复杂接口可以被清晰一致且完备的设计和集成;
(4)各专业都可以在各自特定的视图中进行机轮刹车系统架构不同特性的设计,并实时将设计结果通过“统一的机轮刹车系统架构模型”共享给其他专业,实现多专业间的合作。
实践表明,多视图架构建模方法可以极大降低飞机系统架构设计的工作量:
(1)在物理架构定型前,如果采用传统基于文档的设计方法,各专业需要开展大量的工作进行纸面设计协同(包括功能逻辑的交联、接口的匹配等),效率很低且极易出错;
(2)在引入多视图架构建模方法后,系统间设计协调的时间可以得到充分的缩短,减少了“低效且琐碎的工作量”,虽然增加了“通过建模开展协同设计的工作量”,但整体上是“充分降低了工作量”。
4 结 论
针对“飞机系统架构设计的复杂性”与“缺乏有效的飞机系统架构设计表达方法”之间的矛盾,本文提出了“基于模型的飞机复杂系统架构多视图设计方法”,将SysML架构建模语言和多视图策略引入到飞机系统架构设计中,该方法具有以下特点:
(1)利用SysML建模语言的特点,对多层级、多系统集成、多接口形式和多专业合作的飞机复杂系统架构设计进行解耦,将紧密关联在一起的系统设计工作分解到多张架构视图中,充分降低每张视图的复杂性,进而降低相应设计分析工作的难度;
(2)将多视角的飞机系统架构设计过程与多视图的建模规则进行了融合,自顶向下开展飞机系统多视图架构建模的过程本质上就是开展多系统架构设计集成的过程,在完成多层级不断细化的架构建模后,本质上就已经构建了整机协调的系统架构集成模型,并完成了飞机系统架构综合设计。
具体的:① 通过贯彻统一的架构元素定义和分解,可以充分保持多层级架构间的设计一致性;② 通过贯彻“自顶向下”的架构设计和建模过程,飞机多系统之间可以协同开展设计和建模,并实时完成当前设计状态的集成;③ 通过统一的接口定义和多视图划分原则的应用,带有冗余特性的飞机系统的复杂接口可以被清晰一致且完备的设计和集成;④ 不同专业可以在各自的视图中进行相应系统架构不同特性的设计,并实时将设计结果通过“统一的系统架构模型”共享给其他专业,实现多专业合作,在提高工作效率的同时确保系统综合设计的高质量。
飞机复杂系统架构的设计在多视图的静态表达之外,还要开展充分的全局动态行为逻辑分析,以确认静态架构设计的正确性;下一步研究工作是开展基于模型的飞机复杂系统行为设计和分析。