飞鸟与旋翼无人机雷达微多普勒测量实验研究
2021-11-10陈小龙南钊张海陈唯实关键
陈小龙 南钊 张海 陈唯实 关键
(1.海军航空大学,烟台 264001;2.中国人民解放军 91306部队,上海 200436;3.中国民航科学技术研究院机场研究所,北京 100028)
引 言
鸟击是指航空器起降或飞行过程中与鸟类等相撞的事故[1],如何能够有效地防范鸟击事件的发生一直是一项国际性难题,随着航班数量的不断增加以及自然生态的持续好转,机场的鸟击防范工作压力越来越大[2].随着以无人机等低空飞行器为代表的“低慢小”目标的快速发展,“黑飞”事件也时有发生,恶意操作无人机进行非法活动成为需要重点关注的问题,对重要区域、空中航路安全以及城市安保等方面提出了严峻的挑战[3].现阶段对于鸟情和无人机的监视,通过雷达进行探测是应用广泛的方式手段,但对于飞鸟和无人机的探测,面临的主要问题是检测概率低,分类识别能力有限.有效的特性认知和分析,寻找较为明显的特征差异,是对飞鸟和无人机目标检测和分类的前提,也是目标精细化描述和识别的基础.
微多普勒是传统多普勒的扩展,能够在一定程度上反映目标所具有的与众不同的运动特性[4-5].无人机和飞鸟均为非刚体目标,无人机旋翼的转动和飞鸟翅膀的扇动会在主体平动产生的雷达回波多普勒频移信号附近引入额外的调制边带,该信号成为微多普勒信号,进而产生微多普勒效应[6].文献[3]研究指出,飞鸟与旋翼无人机目标的回波多普勒谱出现展宽,飞鸟翅膀扇动与无人机旋翼转动对回波产生调制特性,具有时变和周期性,体现出微动特征.因此,对飞鸟与旋翼无人机微多普勒特征的建模和精细特性认知可为后续检测和目标分类提供有效途径[7-8].目前该领域多局限于旋翼飞机,如直升机的理论建模和仿真[9-10],对于旋翼无人机与飞鸟微动的建模和特性对比缺乏较为系统的分析,目标与微动特征的对应关系以及影响因素尚不明确,实测数据的分析及实际微多普勒信号的时变特性研究也较少.文献[11]提出了一种基于稀疏长时间积累的无人机目标检测方法,但仅考虑了无人机主体的非匀速平动.文献[12]给出了24 GHz的大疆S900无人机和猫头鹰的雷达微多普勒特征对比结果,但目标类型较为单一,微动特征较为微弱,飞鸟机动导致的翅膀扇动不规律,使其微多普勒复杂,难以获得清晰的高分辨微多普勒图像.
本文以飞鸟和典型旋翼无人机微动特征为例,通过对飞鸟翅膀扑翼运动、旋翼无人机目标主体运动和旋翼转动进行建模分析与参数化表征,对典型旋翼无人机与飞鸟目标的微动特性进行仿真分析,研究目标及雷达参数对其多普勒效应的影响及调制关系.然后利用K波段调频连续波(frequency modulation continuous wave, FMCW)小型雷达搭建目标数据采集与探测平台实现对飞鸟和典型旋翼无人机目标雷达实测数据的采集,并从目标的回波信号特征(微动时频图)出发,利用时频分析技术(短时傅里叶变换)、杂波抑制技术(动目标显示)等方法完成雷达对微动特征的有效描述和对比分析.
1 飞鸟与旋翼无人机微动建模
1.1 飞鸟微多普勒特征建模与参数化表征
飞鸟扑翼是一种典型的带关节的非刚性物体的运动,把通过关节连接的多个段的运动看作是刚体运动进行处理.图1为飞鸟扑翼的运动模型简图.
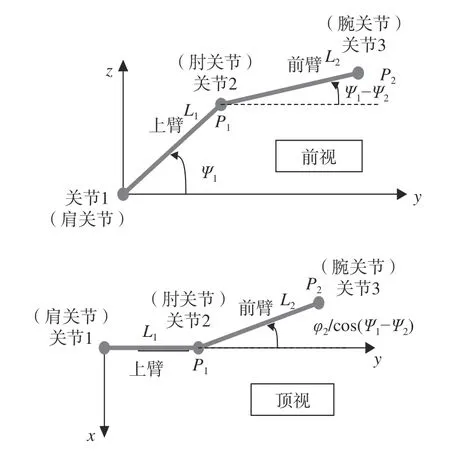
图1 飞鸟扑翼的运动学模型图Fig.1 Kinematics model diagram of bird flapping wings
借用人体的手臂进行形象直观地描述飞鸟的翅膀−包括上臂、前臂及手.其中,通过肘关节连接上臂和前臂,腕关节连接前臂和手.在飞鸟扑翼的运动学模型建立中,假设翅膀有两个相互连接的部件,即肘关节和腕关节.肘关节只能围绕一个运动轴在固定平面做屈伸运动;腕关节可围绕两个相互垂直的运动轴分别做屈伸和环绕运动.此处涉及的翅膀扑打角度及扭转角均用一般的正余弦函数来表示,在此基础上构建出飞鸟翅膀的运动模型.上臂的扑打角度为

式中:A1为 上臂扑动幅度;fflap为 扑打频率; ψ10为上臂扑打角度的滞后.
前臂的扑打角度为

式中:A2为 前臂扑动幅度; ψ20为前臂扑打角度的滞后.
前臂的扭转角为

式中:C2为 前臂的扫角幅度;φ20为前臂扭转角度的滞后.
由于肘关节位置由上臂的摆动位置所确定,可得肘关节的位置P1=(x1(t),y1(t),z1(t)),其中
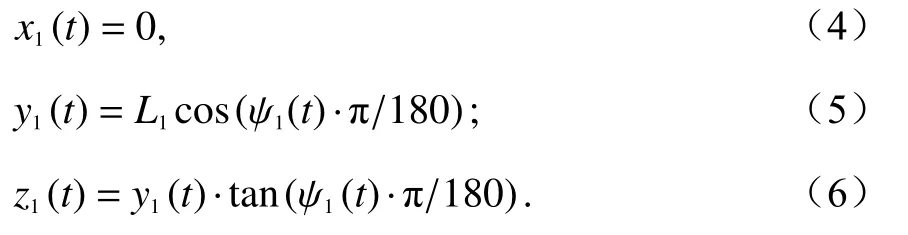
式中,L1为上臂长度.
同理可得,腕关节的位置P2=(x2(t),y2(t),z2(t)).
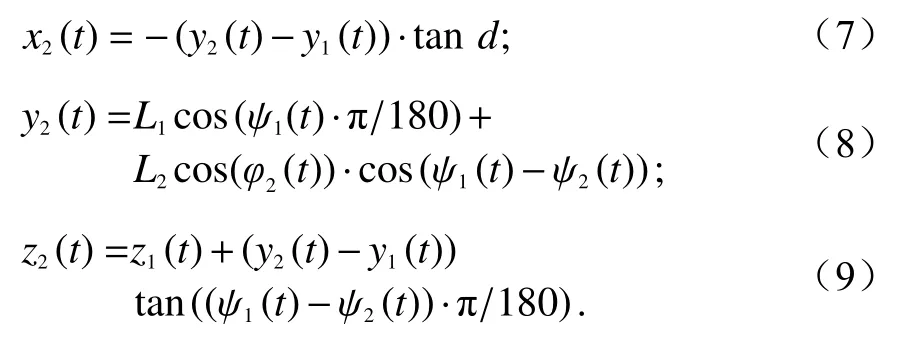
式中:d=φ2(t)/cos(ψ1(t)−ψ2(t));L2为前臂长度.
为了便于分析,确立翼尖线速度随时间的变化关系,进行模型简化,在此鸟类翅膀运动模型的基础上,忽略上臂对角速度的影响,将上臂与前臂当作一个整体.利用前面所建立的前臂扑打角度和扭转角与时间的关系,可以进一步得到角速度和翼尖的线速度.角速度表达式为:
所以,飞鸟翼尖的线速度可以表示为
式中,L1+L2为飞鸟翼展长度的一半,即半翼展.
式(12)~(13)是在一定的简化基础上得出的,可以根据速度和多普勒的关系给出微多普勒的表达式.然而,由于鸟类飞行扑翼运动过程较为复杂,涉及到多个关节的活动,关节的旋转角速度又各不相同,使得翼尖速度的推导需要建立关节角速度之间的定量关系,导致影响微动的主要因素即翅膀的翼尖线速度和多普勒的关系复杂.
1.2 无人机旋翼微多普勒特征建模与参数化表征
多旋翼无人机的回波信号表现为无人机目标主体的多普勒信号和旋翼部件微多普勒信号的叠加.旋翼无人机目标的微多普勒特征由运动中旋转的旋翼产生,因此重点对旋转旋翼叶片进行研究.
1.2.1 单旋翼叶片微动建模
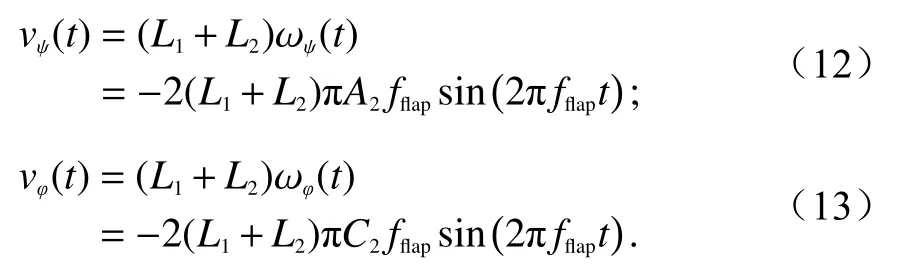
首先建立空间固定坐标系(X,Y,Z)、物体固定坐标系(x,y,z),两坐标系互相平行,并将雷达及旋翼中心位置分别取在空间固定坐标系及物体固定坐标系的原点,两者之间的距离为R0, 旋翼叶片的长度为l0.另外,将旋翼叶片看作是由无数散射点组成,在旋翼无人机目标运动过程中,散射点P以角速度 ω绕旋翼中心旋转,旋翼相对于雷达的方位角、俯仰角分别是α、 β.如图2所示.
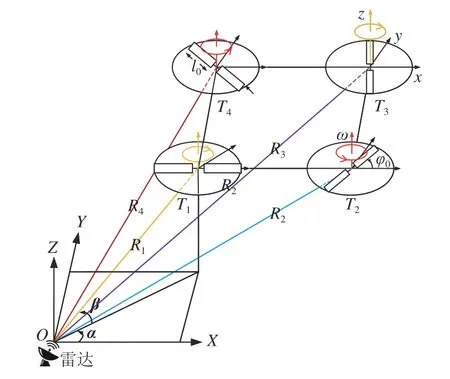
图2 雷达与四旋翼无人机的几何关系图Fig.2 Geometric relationship between radar and quadrotor UAV
分析当方位角 α和 俯仰角 β均为零时的情况,此时雷达及旋翼在同一平面内,如图3所示.
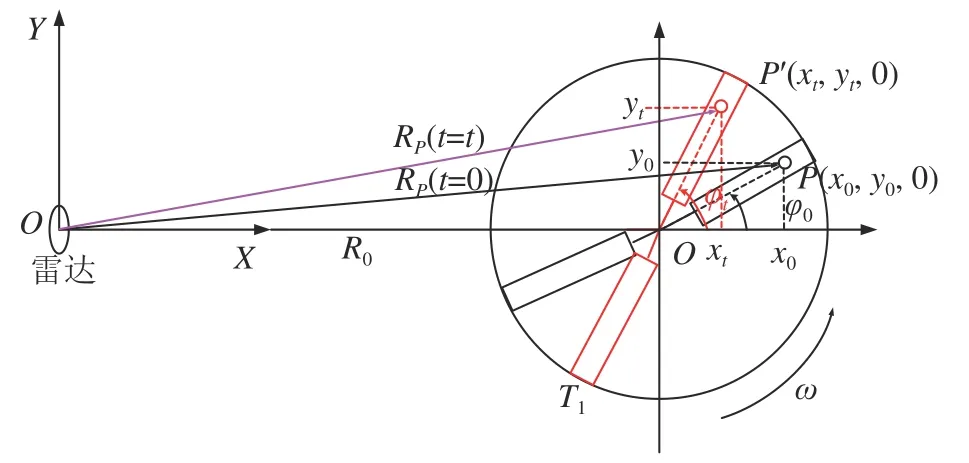
图3 旋翼叶片的微动模型图Fig.3 The micromotion model of the rotor blade
假设点P的初始旋转角为φ0,则经过时间t旋转角就会变为φt=φ0+2πft,坐标点由 (x0,y0,0)变为点P′(xt,yt,0).
从旋翼中心到点P的距离为一固定值l=根据余弦公式可得从散射点P′到雷达的距离为

假定远场,有(l/R0)2→0, 即φt→0,近似可得

则散射的相位函数为

此时雷达接收到的散射点P的回波信号为
在研究旋翼叶片散射点的基础上,对点P的回波信号做长度上的积分可得单个完整叶片回波:
假设每个旋翼有N个叶片且每个叶片的初始相位不同,旋翼片叶间的初始旋转角存在以下关系:

则有第k个叶片的初始旋转角为

所以单个旋翼总的雷达回波变为
若俯仰角 β即旋翼叶片相对于雷达的高度不为零时,该通过积分的散射点模型能够较好地反映旋翼叶片的信息,更贴近于现实生活中的情况.
通过分析可得此时旋翼的接收信号为
式中,Φk(t)为相位函数,
对接收信号的相位函数时间求导可以得到回波信号的瞬时多普勒频率,得到旋翼第k个叶片等效瞬时微多普勒频率:
1.2.2 多旋翼无人机微动建模
对于多旋翼的无人机,其反映微动特性的旋翼回波可看作由四个单旋翼回波叠加形成.假设各旋翼叶片的雷达截面积(radar cross section, RCS)相同且均为1,在直升机旋翼模型基础上,构建出多旋翼无人机目标回波模型:
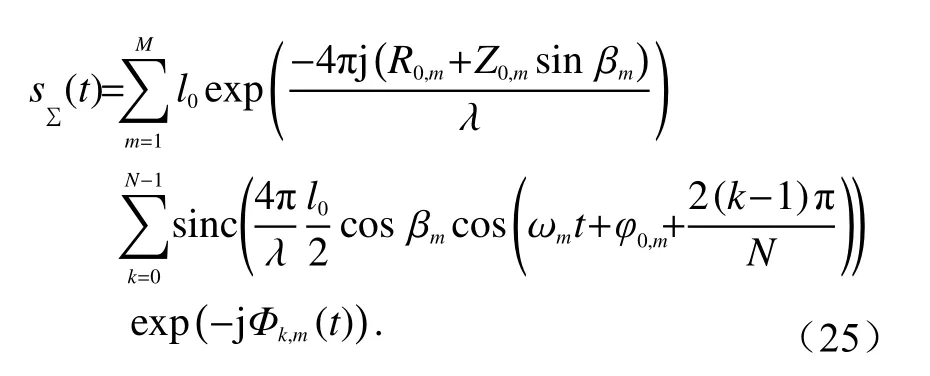
式中:M为旋翼数;l0表示旋翼叶片长度;R0,m为雷达到第m个旋翼中心的距离;Z0,m为 第m个旋翼叶片的高度; βm为 雷达到第m个 旋翼的俯仰角;N为单个旋翼叶片数; ωm为第m个 旋翼的转动角频率;φ0,m为 第m个旋翼的初始旋转角;相位函数
通过对回波信号相位函数时间求导,得到第m个旋翼的第k个叶片等效瞬时微多普勒频率:
由式(27)可知,微多普勒频率被旋转速率以正弦函数进行调制.由于无人机旋翼转动时,叶尖处的线速度最大,所以其对应的多普勒频率也最大,即最大的微多普勒频率为

式中:v叶尖为旋翼叶尖的线速度;ω为旋翼的旋转角速度,rad/s;n为旋翼叶片的转速,r/s.
通过对无人机目标叶片的数目、旋翼叶片的转速、叶尖的速度,以及旋翼叶片的长度参数的估计可以判断无人机的运动状态,实现对多旋翼无人机特征的精细化描述.
2 微动特征影响因素分析
2.1 飞鸟微动影响因素分析
通过对飞鸟扑翼运动模型的建立,可发现飞鸟自身对于回波频谱影响因素有:扑打频率、飞行速度、翼弦长度、扑动角度的幅度等.其中,对于一般的飞鸟而言飞行速度、扑动角度等因素相差不大,但是对于不同鸟类如飞燕和雀类的扑翼运动状态、翼展长度等却不尽相同.
2.1.1 扑翼频率与微多普勒的关系
假设某X波段雷达(波长λ=0.03 m)位于x=20 m、y=0 m、z=−10 m的位置,飞鸟的飞行速度为1.0 m/s,上臂和前臂长度均为0.5 m.图4为仿真的飞鸟目标运动轨迹、雷达距离像.在雷达和飞鸟几何分布关系中,飞鸟目标在起始位置与该雷达的直线距离为22.36 m,两者之间的相对高度为10 m.运动过程中,飞鸟水平匀速朝向雷达飞行.随着观测时间增长即脉冲数逐渐积累,飞鸟与雷达距离逐渐缩短.
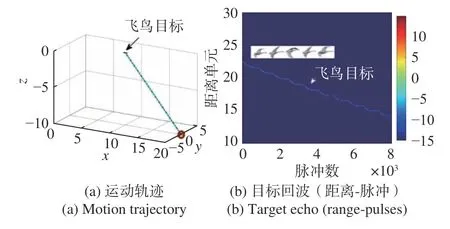
图4 雷达和飞鸟几何分布关系Fig.4 The geometric relationship between radar and flying birds
在上述参数不变的情况下,图5分别给出了扑打频率为1 Hz和2 Hz时的微多普勒特征.通过对比可知随着扑打频率的增加,飞鸟扑翼运动的微多普勒特征越明显,即在主体运动过程中产生的发射信号多普勒偏移频率附近所产生的边频越明显,并且目标微多普勒特征的周期变化情况与飞鸟扑打频率呈线性关系.由此,在雷达实测中可以通过微多普勒特征图像对飞鸟扑打频率做出估计.
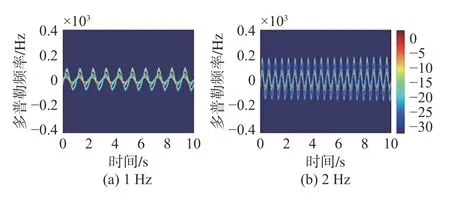
图5 不同扑打频率下飞鸟扑翼的微多普勒特征Fig.5 Micro-Doppler characteristics of flapping wings of birds
2.1.2 翼展长度与微多普勒的关系
图6给出了半翼展长度分别为0.25 m和1 m的飞鸟微多普勒特征,其中半翼展长度为上臂和前臂长度之和.由图6可知:随着翼展长度的增加,飞鸟扑翼运动的微多普勒特征越明显;并且随着观测时间的增加,飞鸟与雷达之间的距离逐渐缩短,雷达对飞鸟目标观测角度也随之增大.由于飞鸟扑翼运动是翼弦围绕某个关节以一定的扑翼角度上下运动,所以随着时间的增长,飞鸟扑翼上下运动速度的径向分量就会随之增大,其主体移动产生的多普勒偏移频率和扑翼运动产生的边频也随之展宽,如图6(b)所示.
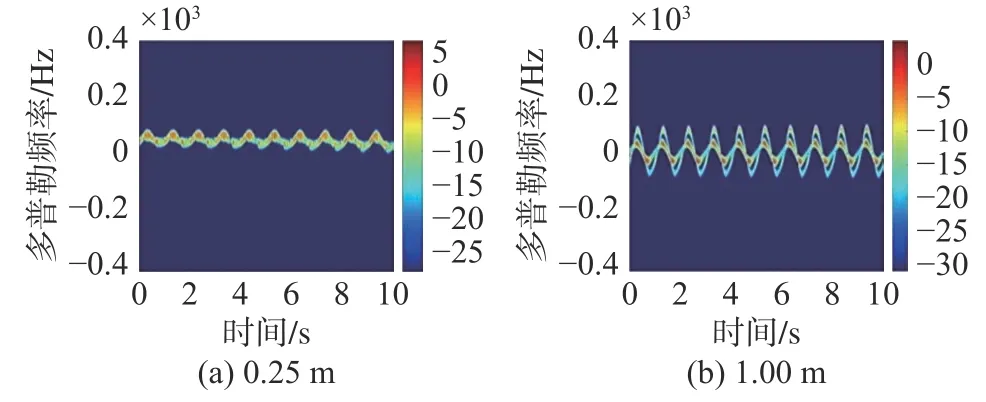
图6 不同半翼展长度下飞鸟微多普勒特征(1 m/s速度)Fig.6 Micro-Doppler characteristics of bird flapping wings with half wingspan
2.2 旋翼无人机微动影响因素分析
由式(27)可知,旋翼无人机目标的微多普勒受到载波频率、旋翼叶片长度、雷达俯仰角、旋翼叶片初始相位、旋翼数目、旋翼叶片转速和旋翼叶片数目的影响.其中,前三个参数仅与微多普勒频率幅度有关,而相位和幅度则受后四个参数的影响.
2.2.1 微动参数估计
设雷达工作在C波段,λ=0.06 m,距离分辨率为0.5 m,观测时间为0.1 s.旋翼无人机目标处于悬停状态,有四个旋翼,每个旋翼为两个叶片,叶片的长度l0=13.5 m,方位角 α=0° ,俯仰角 β=45°,雷达与旋翼中心间的距离为707 m,旋翼叶片的旋转速率n=40 r/s,得到叶尖的旋转线速度为v=2πl0n=3391.2m/s.因此,最大多普勒频移为fd,max=(2v/λ)cosβ=79 931.35 Hz.由于奈奎斯特采样速率为两倍的最大多普勒频率,即159 862.70 Hz,为防止混叠现象的产生,信号采样速率必须大于等于奈奎斯特采样速率,所以采用200 kHz采样速率.
利用多旋翼散射点的积分回波模型,得到旋转叶片的时域特征和微多普勒特征,如图7和图8所示.每个旋翼有两个叶片,叶片的旋转速率是40 r/s,所以每个叶片在0.1 s之内就会产生8次闪烁,闪烁的时间间隔为0.125 s.四旋翼无人机回波的时域和对应的时频域闪烁的次数相同,均为8次.
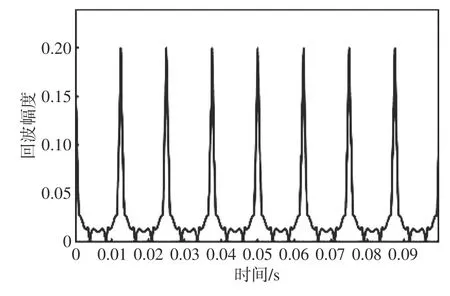
图7 旋转叶片的时域特征Fig.7 Time domain characteristics of rotating blade
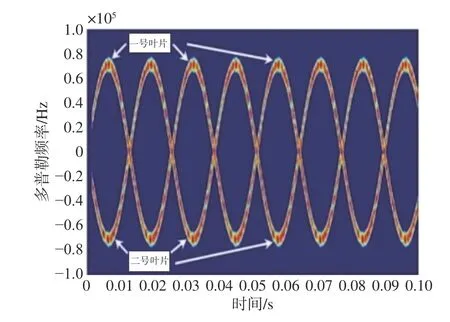
图8 旋转叶片的微多普勒特征Fig.8 Micro Doppler characteristics of rotating blades
2.2.2 旋翼叶片数对微多普勒的影响
图9给出了当旋翼无人机的叶片数为3时目标的微多普勒特征.在0.1 s之内的每个叶片闪烁次数相同,且为24次.结合两叶片旋翼微多普勒特征图像及闪烁次数可得,闪烁的频率与旋翼叶片的数目以及旋转速率有关,具体关系为闪烁频率f=kNn,其中n为转速;N为旋翼叶片数;当N为偶数时k取1,N为奇数时k取2.由此可以根据旋翼的微多普勒特征来进一步估算出旋翼叶片的转动速率,并且可以明显看出图中有三条交替变化的正弦曲线.当旋翼叶片个数为2时,在0.1 s内出现8次闪烁,可以估计出叶片的旋转速率是40 r/s,验证了理论分析的正确性.另外,通过分析图8和图9得出,无人机旋翼叶片的微多普勒频率关于平均多普勒频率即零频对称,这是由无人机四个旋翼运动特征(呈中心对称位置的旋翼转速相同,相邻位置的旋翼转速相反)决定的.
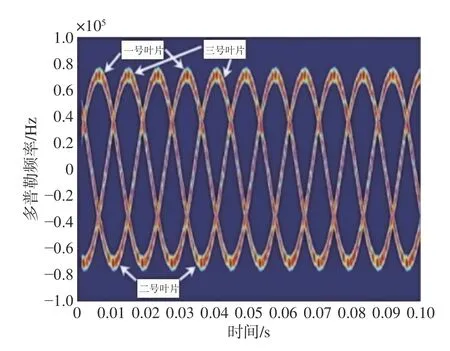
图9 旋翼叶片数目为3的微多普勒特征Fig.9 Micro-Doppler feature with 3 rotor blades
2.2.3 旋翼叶片转速对微多普勒的影响
根据第k个叶片的等效瞬时微多普勒频率函数关系式可以看出,旋翼转速会直接影响瞬时微多普勒频率幅度的大小,并且微多普勒频率受到旋转速率的影响.假设旋翼的叶片数均为2,观测时间设为0.1 s,设置不同的旋转速率进行仿真.根据平衡条件,旋翼1和3转速相同且均为20 r/s,旋翼2和4转速相同且均为30 r/s,对此进行仿真得到的旋翼叶片的微多普勒特征如图10所示.
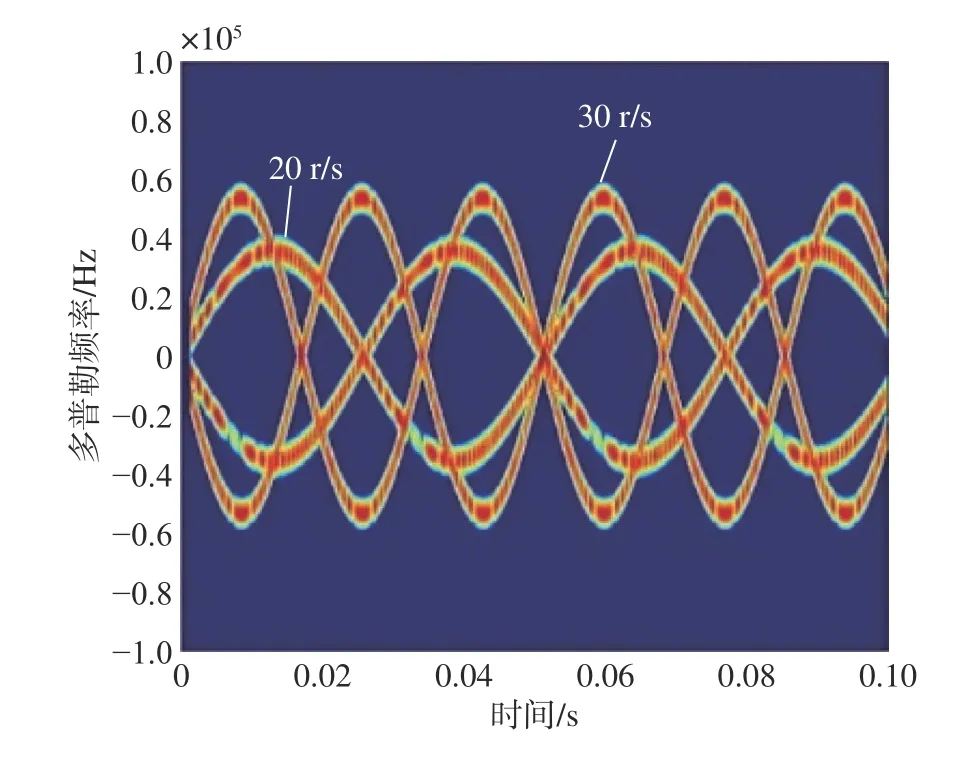
图10 两组转速不同旋翼叶片的微多普勒特征Fig.10 Micro Doppler characteristics of two groups of rotor blades with different speeds
当改变参数使得旋翼无人机中心对称位置的两对旋翼转速互不相同时,可以明显看出闪烁现象不再呈单一的周期性变化.转速为20 r/s的旋翼对应的闪烁次数为4次,转速为30 r/s的旋翼对应的闪烁次数为6次.并且旋翼的转速不同会导致微多普勒频率发生变化,即转动速率越大,多普勒频率也会随之变大.综上分析可得,微多普勒频率的大小、闪烁现象的周期变化及出现的次数都会受到旋翼叶片的转速影响.
3 雷达微动测量实验结果
3.1 实验方案与配置
采用K波段FMCW雷达采集飞鸟和无人机数据,并进行特性分析.该雷达探测系统主要由射频模块、控制模块、采集模块以及软件模块四部分组成.射频模块实现FMCW信号的发射,并对接收回波信号进行混频、滤波、放大;控制模块负责接收上位机命令,产生控制信号,并进一步对回波信号滤波放大;采集模块负责采集回波信号,并将原始回波信号传输到上位机;软件模块完成上位机Windows系统下的驱动、信息显示,以及雷达核心参数的设置.该K波段FMCW雷达主要技术性能指标如表1所示.
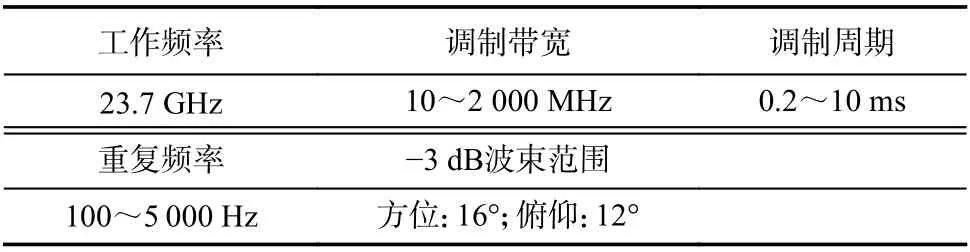
表1 K波段FMCW雷达主要技术指标Tab.1 Mainparameters of K-band FMCW radar
为尽可能减少外界环境干扰因素的影响,以及达到雷达对目标的观测距离、角度等因素方便可控的目的,分别对大小不同的旋翼无人机进行室内观测实验,实验场景如图11所示.
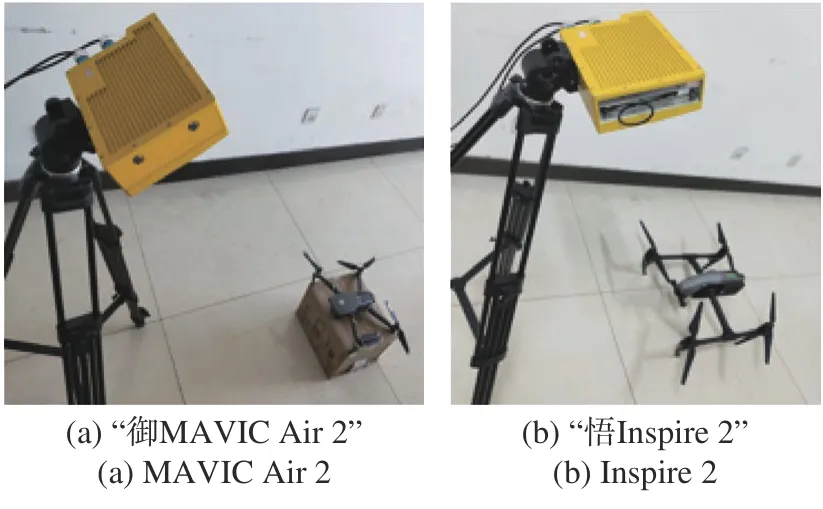
图11 不同无人机的雷达测量场景Fig.11 UAV radar measurement scenes
3.2 实验结果分析
3.2.1 无人机微多普勒测量
实验所用无人机为大疆系列的“御MAVIC Air 2”无人机和“悟Inspire 2”无人机.“御MAVIC Air 2”的螺旋桨直径为22 cm(即旋翼叶片的长度l1=11 cm),转速n1=1 950 r/min.经调试,雷达的参数设置为:信号的调制带宽B=200 MHz,采样频率f=500 kHz,信号的调制周期T=0.2 ms,周期数N=1 024,时间窗长为16,观测距离d=1.2 m,观测角度θ=−55°.“悟Inspire 2”的螺旋桨直径为38 cm(即l2=19 cm),转速n2=1 500 r/min,进行实验时雷达的相关参数设置与“御MAVIC Air 2”相同.根据式(28)可得,“御MAVIC Air 2”最大微多普勒频率fmax,1=(4l1πn1/λ)cosβ=2 031.3 Hz,“悟Inspire 2”最大的微多普勒频率为2 703.3 Hz.“御MAVIC Air 2”以及“悟Inspire 2”旋翼转动时的微多普勒特征分别如图12、13所示.
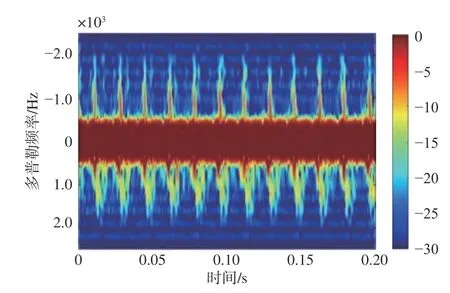
图12 “御MAVIC Air 2”的微多普勒特征Fig.12 Micro-Doppler of MAVIC Air 2
从图12、13可以进一步根据微多普勒特征估计得出目标旋翼的叶片数目、旋翼转速、叶尖速度以及叶片长度信息.从时频图(图12)中可以粗略估计出目标的多谱勒峰值为2 000 Hz,计算数据与实验结果相吻合.由于雷达可设置的最小调制周期为0.2 ms,导致采样频率最大为5 kHz,从而使得目标旋翼转动时产生的多普勒超过了雷达采样频率的量程范围,造成了目标多普勒信息的缺失,如图13所示.另外通过对比图12和图13可知,在旋翼数目相同的情况下,无人机的旋翼叶片越长(越大),转速越高,目标的回波幅度就越强,微多普勒特征越明显,对应的多普勒频率也越大.
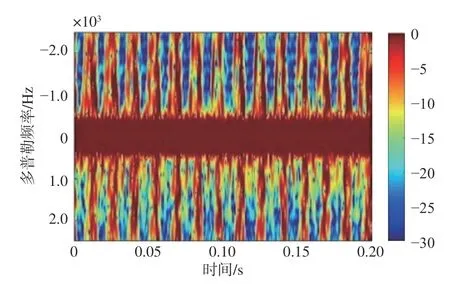
图13 “悟Inspire 2”的微多普勒特征Fig.13 Micro-Doppler of Inspire 2
3.2.2 飞鸟微多普勒测量
受季节性影响,海鸥及其他飞鸟的作息及外出觅食规律难以掌握,为解决这一问题,采用高度仿真扑翼飞行运动的模拟鸟进行实验,实验场景如图14所示.

图14 模拟鸟微动测量实验场景Fig.14 Simulated bird micro-motion measurement experiment
实验所用模拟鸟的骨架为塑料材质,翅膀为布质,半翼展长度22 cm,扑打频率3.5 Hz.经调试,雷达的参数设置为:信号的调制带宽200 MHz,采样频率500 kHz,信号的调制周期1 ms,周期数2 048,时间窗长为32,观测距离1.95 m,观测角度35°.实验时单只模拟鸟和双模拟鸟扑翼运动的微多普勒特征分别如图15和图16所示.
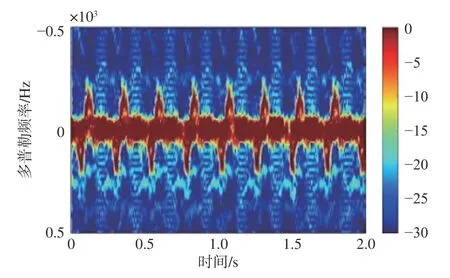
图15 单只模拟鸟的微多普勒特征Fig.15 Micro-Doppler characteristics of one simulated bird

图16 双模拟鸟的微多普勒特征Fig.16 Micro-Doppler characteristics of two simulated birds
从图16的时频图中可以发现:雷达对飞鸟进行扑翼运动时所产生的微多普勒效应可以进行有效观测;并且根据图中微多普勒特征的波形频率以及多普勒峰值数据可以进一步估计得出模拟鸟的翼展长度、扑打频率等信息.当两只模拟鸟并排扑翼运动时,在时频域里的微动特征发生重叠情况.
3.2.3 观测角度对微动测量的影响
在正常观测的情况下,分别通过增大、减小观测角度来进行研究分析.另一方面,为了消除斜视观测对目标多普勒造成的回波幅度强弱不一的影响,选取垂直照射的方式对目标进行观测.图17分别给出了观测角度为20°、70°、90°时旋翼目标的微多普勒特征.

图17 不同观测角度下旋翼目标的微多普勒特征Fig.17 Micro-Doppler characteristics of rotor target with different observation angles
通过对比分析可知,雷达对目标的探测存在最佳观测角度,当观测角度发生改变时,目标微动效应减弱.另外,当雷达对目标进行垂直观测(观测角90°)时,时频图中的多普勒稳定度具有明显改善,峰值多普勒几乎保持稳定,且由于垂直照射,目标回波信号很强,叶片的微动特征明显.但在垂直照射时由于叶片朝向雷达方向的径向速度变小,从而导致目标的峰值多普勒频率减小显著.
3.2.4 时间窗长对微动测量的影响
时间窗即时频分析的窗长度,在一定程度上可反映频率随时间的变化.考虑到时间窗长度的设置一般为2n倍,所以在正常观测的情况下,分别取与之时间窗长临近的三组数据进行研究分析.图18给出了时间窗长为8、16、64时旋翼目标的微多普勒特征.
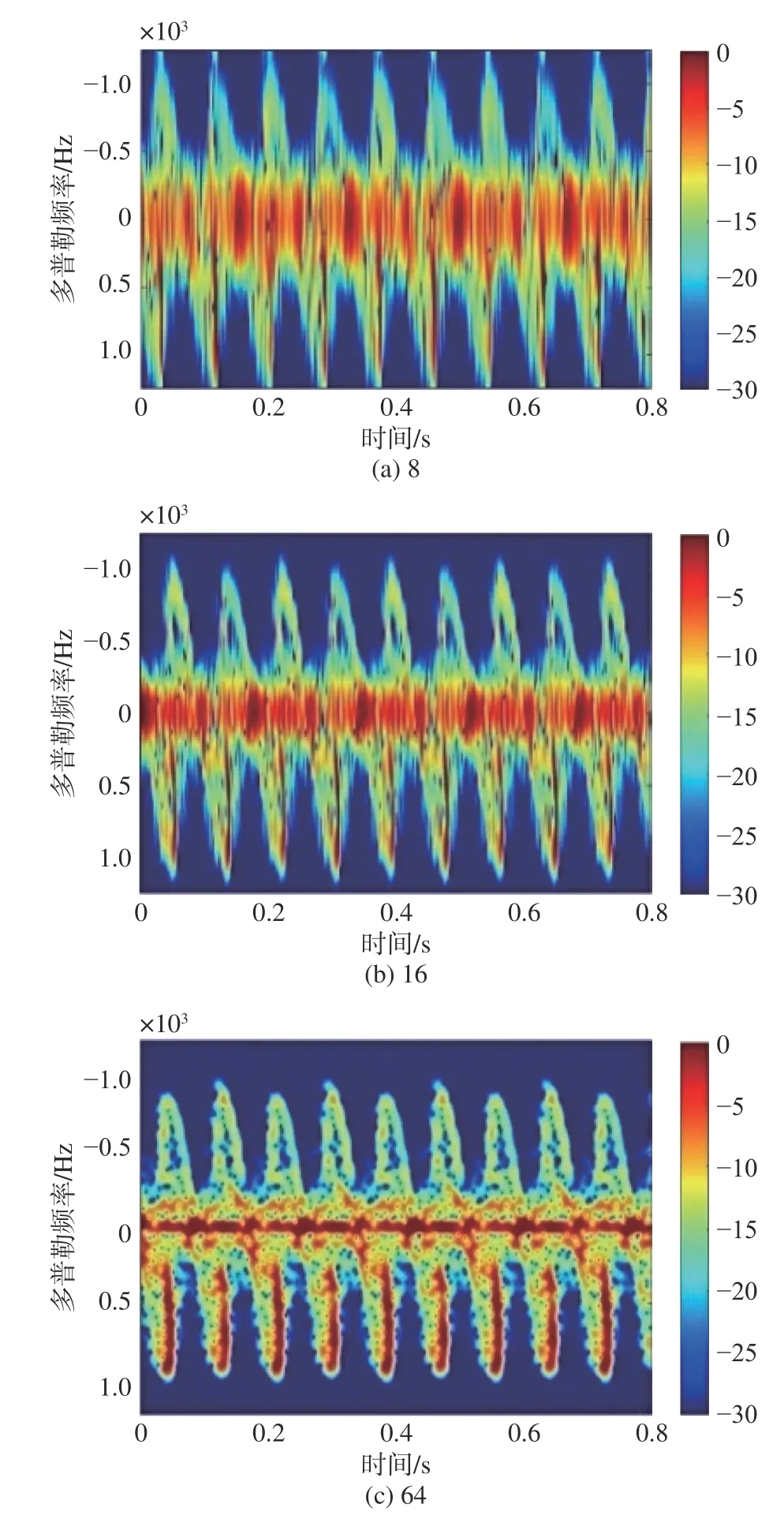
图18 不同时间窗长下旋翼目标的微多普勒特征Fig.18 Micro-Doppler characteristics of rotor target with different time windows
时间窗的大小反映频率随时间的变化程度.窗口宽度N、取样周期T和频率分辨率 ∆f的关系为∆f=1/(NT),可见:时间窗宽度越小,越能反映目标频率随时间的变化,即时间分辨率越高,多普勒分辨力会随之下降;反之,时间分辨率越低,但多普勒分辨力会随之提高.通过图18对比分析可知:当时间窗长为8时,叶片的多普勒频率发生明显展宽;当时间窗长为16时,叶片的多普勒频率仍有微弱的展宽现象,但得到明显改善;当时间窗长为64时,目标的微多普勒特征较为清晰明显,多普勒峰值便于观测.在实际中,应根据旋翼目标的转速来合理选取时频分析的时间窗长,转速较快时,选取短窗长;转速较慢时,选取长窗长.
3.2.5 调制周期对微动测量的影响
在正常观测的情况下,分别通过成倍数的增大、减小FMCW的调制周期来进行研究分析.图19给出了调制周期为0.2 ms、0.5 ms、0.7 ms时旋翼目标的微多普勒特征.

图19 不同调制周期下旋翼目标的微多普勒特征Fig.19 Micro-Doppler characteristics of rotor target with different modulation periods
对于FMCW体制的雷达,调制周期一方面影响发射的三角波调制信号的周期变化时间的长短进而影响观测时间,即观测时间=周期数×调制周期;另一方面时域范围的选取受到奈奎斯特采样定理的限制,由于调制周期与雷达重复频率成反比关系,所以调制周期越长,雷达重复频率就越小,对应目标多普勒的时域范围也就越小;反之,调制周期越短,雷达重复频率就越大,对应目标多普勒的时域范围也就越大.当调制周期过小时,目标的多普勒特征较为发散,不便于分析研究;当调制周期过大时,会产生多普勒混叠现象.根据实验所得风扇的微多普勒特征图像可以看出当雷达信号调制周期为0.2 ms即与原来相比减小一半时,观测时间也相应地缩短为原来的二分之一,同时目标的时域范围变为原来的两倍,目标的多普勒特征发散较为严重.当雷达信号调制周期为0.5 ms时,目标存在轻微的多普勒重叠现象.当调制周期为0.7 ms时,重叠现象严重,目标多普勒特征严重缺失.所以,在进行雷达实测时,雷达参数的选取尤为重要.
通过比较无人机和飞鸟微动的仿真结果和实测数据结果可知,受雷达的功率、目标的大小、旋翼的个数、转速(无人机转速较高)、观测的角度、雷达的参数和环境背景等多种因素的影响,回波微弱,严格符合正余弦调制的微动特征(仿真结果)并不明显,但无人机和飞鸟多普勒调制效应有较大差异,因此可以通过该特征区分无人机和飞鸟目标.
4 结 论
本文对飞鸟翅膀扑翼运动、旋翼无人机目标主体运动和旋翼转动进行建模分析与参数化表征.并通过仿真分析和K波段 FMCW雷达实测实验,对典型旋翼无人机目标(大疆“御MAVIC Air 2”、“悟Inspire 2”无人机)和仿真飞鸟目标进行微动特征测量,并在雷达观测角度、时间窗长、调制周期三个方面进行微动特性影响因素分析.通过实验分析可知:1)无人机的旋翼叶片越长(越大),转速越高,目标的回波幅度就越强,微多普勒特征越明显,对应的多普勒频率也越大.2)叶片转速的不同,主要影响的是目标多谱勒峰值的变化,转速越高,目标多谱勒峰值越大.3)在观测时间一定的情况下,叶片数目越多,目标多普勒变化的周期数目越多;当目标叶片数过多时存在微动特征部分重叠的现象.4)对目标的探测存在最佳观测角度.5)调制周期影响观测时间长短,并与采样频率成反比,过小时,目标的多普勒特征较为发散;过大时,会产生多普勒混叠现象.6)时间窗的选取要灵活合适,时间窗宽度越小时间分辨率越高,但多普勒分辨力会随之下降.下一步将开展室外微动测量实验,深入研究复杂背景下的微动特征提取技术,为后续的飞鸟和旋翼无人机目标分类和识别奠定基础.