基于微波反射法的冬笋探测器设计
2021-11-09王俊楠倪忠进黄政晖倪益华
王俊楠 吕 艳,2 倪忠进,2 黄政晖 倪益华,3*
(1.浙江农林大学 工程学院,杭州 311300;2.浙江省竹资源与高效利用协同创新中心,杭州 311300;3.国家林业局林业感知技术与智能装备重点实验室,杭州 311300)
我国是竹类资源较为丰富的国家,竹林面积约641.16万 hm2,其中毛竹林面积约467.78万 hm2,占总竹林面积72.96%[1-2]。冬笋是夏末秋初时期由毛竹地下茎的鞭芽生长而成[3],是一种含有丰富营养物质的美味食材。由于冬笋的成竹率很低[4],因此合理的挖取冬笋既能为农民创造收入,也不会影响竹林生态平衡。但冬笋生长在地表以下,只能依靠农民的经验判断冬笋的位置,依据人工经验的采收方式限制了冬笋的产量,而且盲目的挖掘会破坏植物的根茎。
目前国内外对于冬笋探测技术的相关研究较少,可用于探测冬笋的方法有以下几种:电阻率法、超声波法、微波成像法等。储修祥等[5]发明了一种电阻式冬笋探测器,使用探针作为传感器利用冬笋与土壤的电阻率差异来判断地下冬笋的位置;王刚等[6]发明了一种分离式超声波和地阻互补冬笋探测仪,利用超声波在不同介质中衰减的规律配合冬笋与土壤电阻率的差异协同辨别冬笋生长的位置。上述2种设备虽然制作成本低廉,但每次探测需要将探针插入泥土内容易对冬笋造成损伤,且探测过程复杂。Butnor等[7]利用探地雷达设备对土壤内的植物根茎进行成像处理,并构建植物根茎地下空间分布的模型,该模型最小能分辨直径为1 cm的地下茎。陈雨等[8]采用并行电法探测冬笋的方案,用探地雷达对土壤下进行探测,通过分析得到的3维电阻率图像能准确呈现冬笋及其根系在空间上的分布,电法探测法是利用冬笋与其生长环境之间存在电性差异来确认冬笋位置,能做到高准确度和无损检测,但是以上2种方法设备精密昂贵且操作复杂,并不适合农业上的广泛推广使用。
本研究拟采用微波反射法,设计一种冬笋探测器,构建基于卷积神经网络的冬笋探测器回波序列检测模型验证冬笋探测器的可行性,以期为竹林间探测冬笋提供一种准确性较高的探测仪器。
1 冬笋探测器原理
土壤和冬笋同属于电介质,当外加电场作用于电介质时,其内部可移动带电粒子发生取向极化现象,通常用介电常数描述介质在外加电场作用下的极化特性,介质的相对复数介电常数ε定义为[9]:
ε=ε′-jε″
式中:实部ε′影响波的传播速度;虚部ε″决定波的衰减特性。介质的介电常数并非恒量,随着电场频率、温度等因素变化而变化[10]。
土壤主要由水、矿物质、有机质和空气组成,浅层土壤的含水率为10%~30%[11]。冬笋主要由水、蛋白质、纤维素等组成,含水率高达85%[12]。两者物质成分中均含有水,水是强极性偶极子,在相同电场下极化程度远大于其他物质,常温下,在频率f=1010Hz微波作用下水的介电常数ε=64-j29,其他介质在相同环境下ε′为1.5~6.0,ε″约为0.01[13-14]。
Birchak等[15]提出一种分层模型的公式,用于定义混合型含水介质的等效介电常数:
(1)
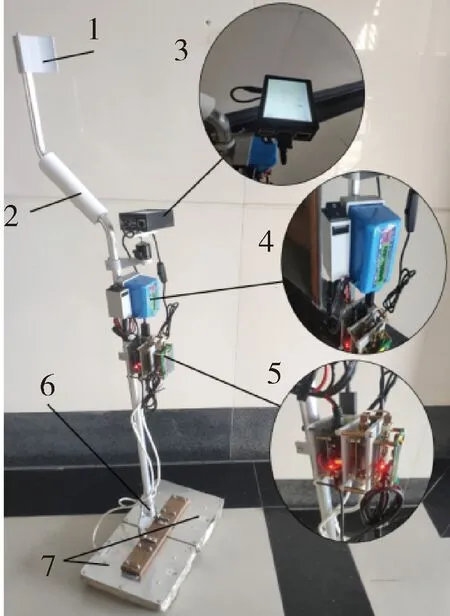
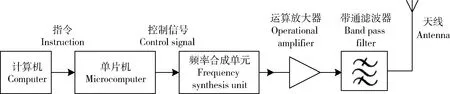
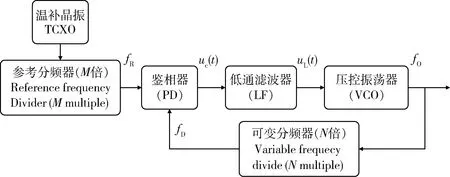
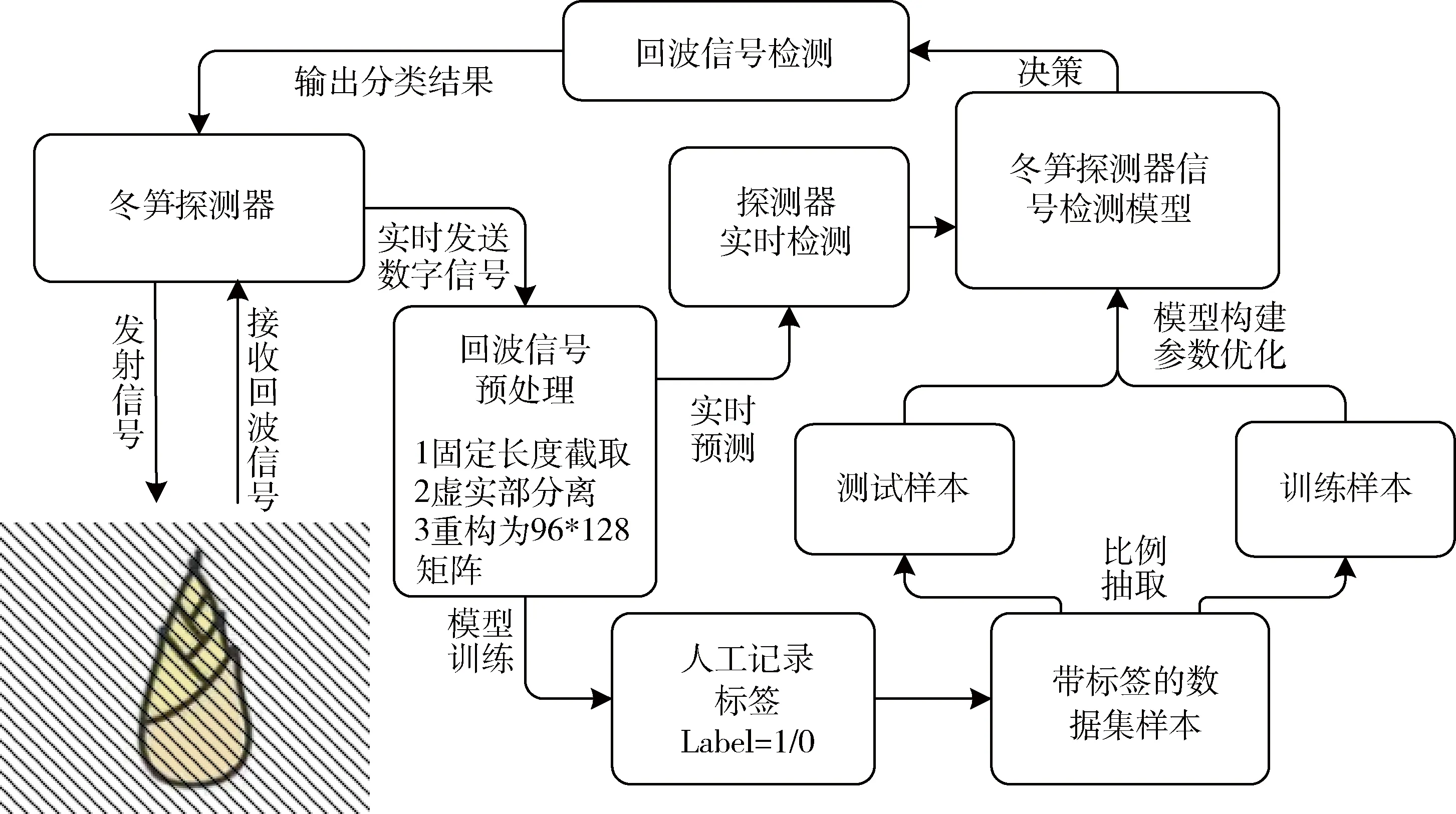
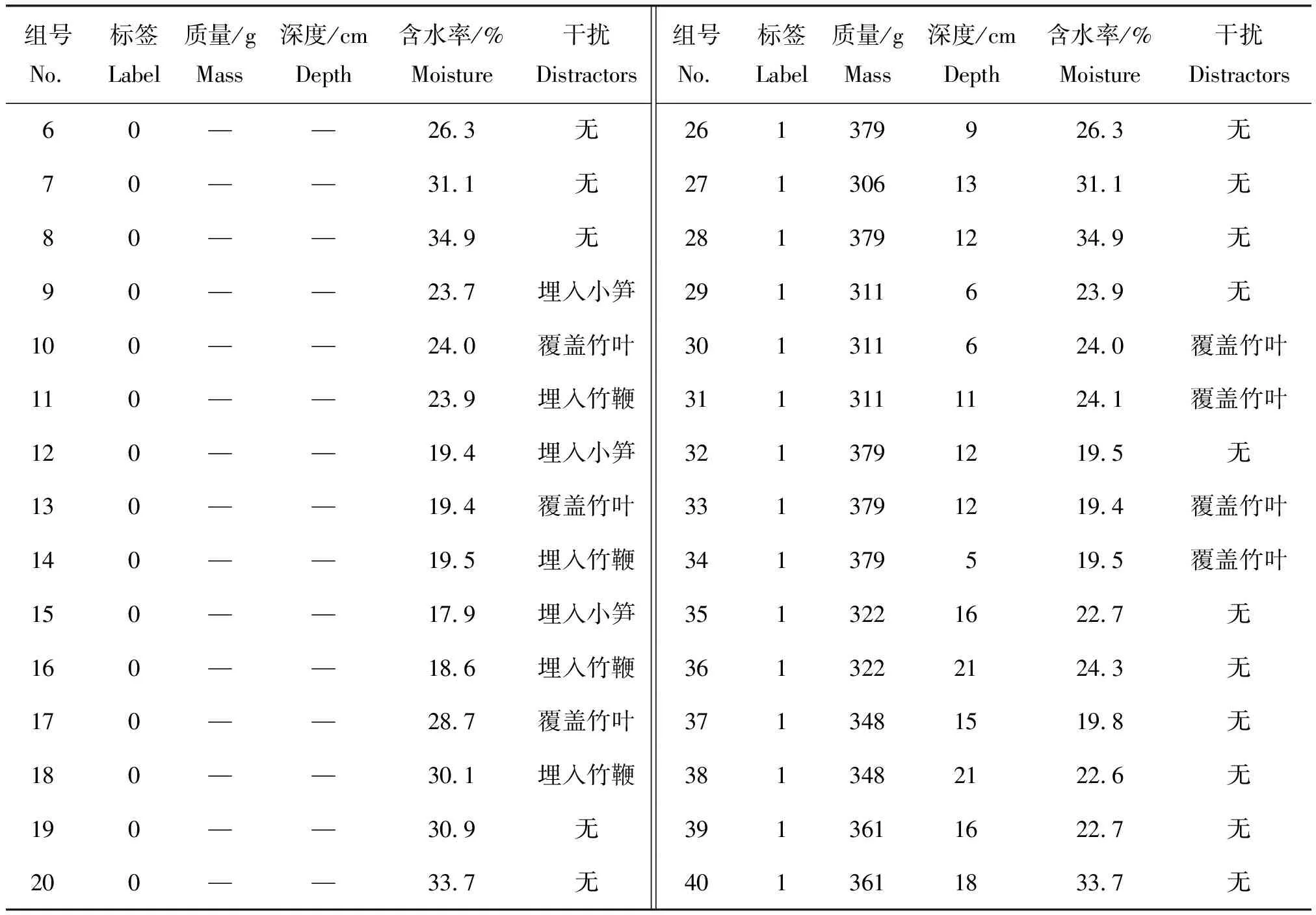
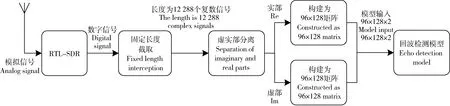
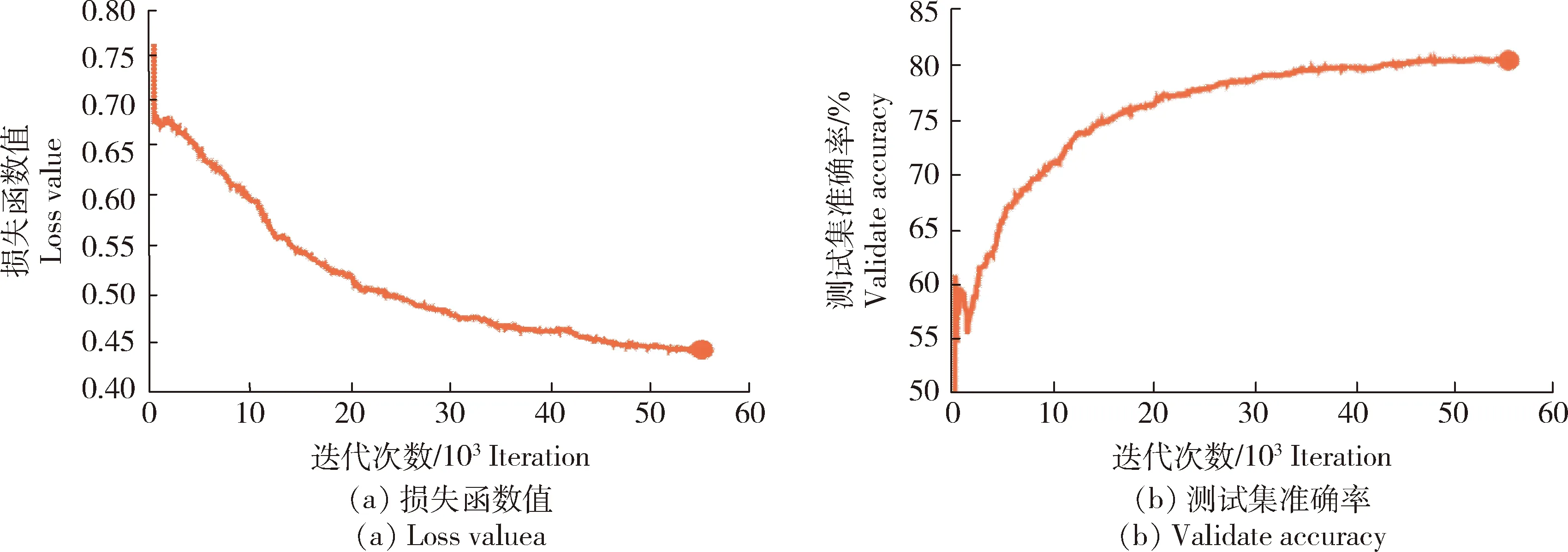
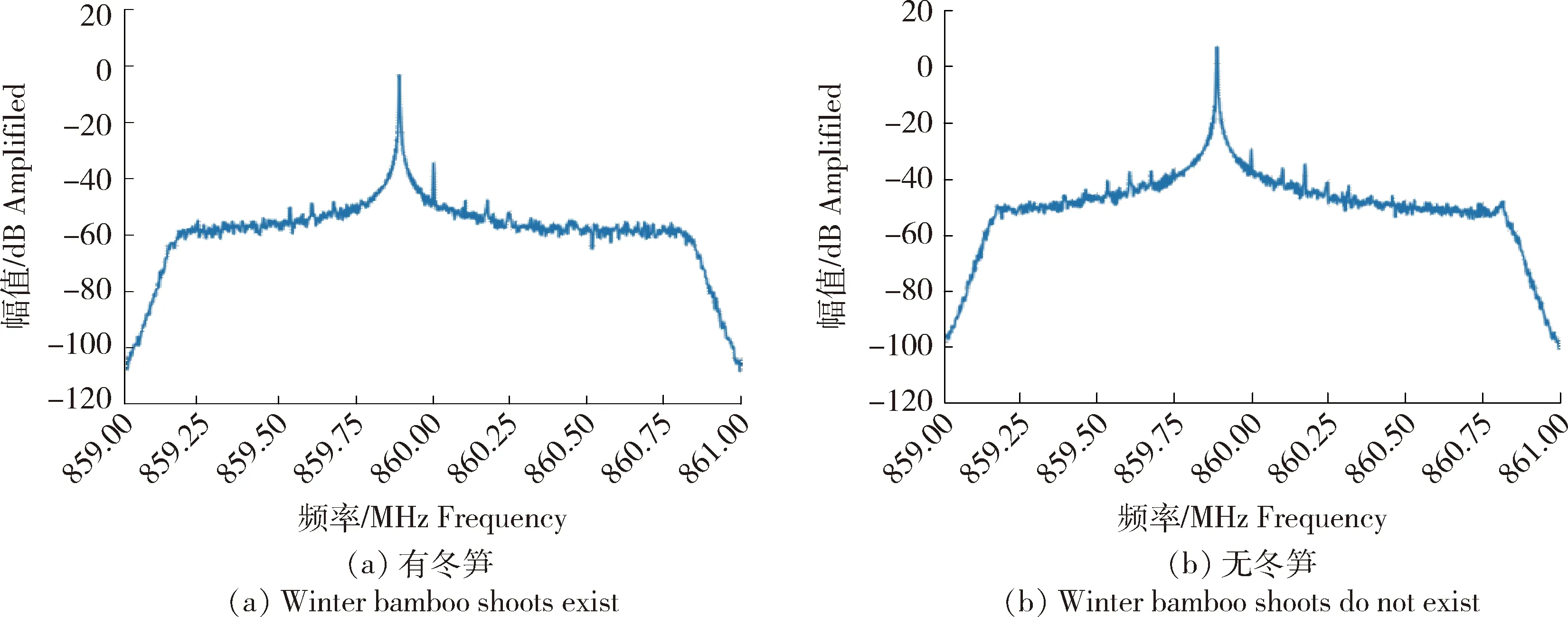
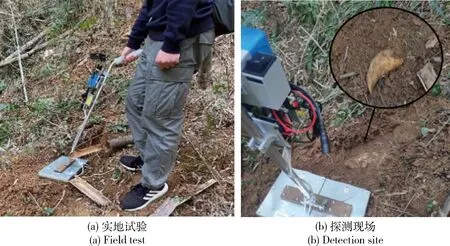
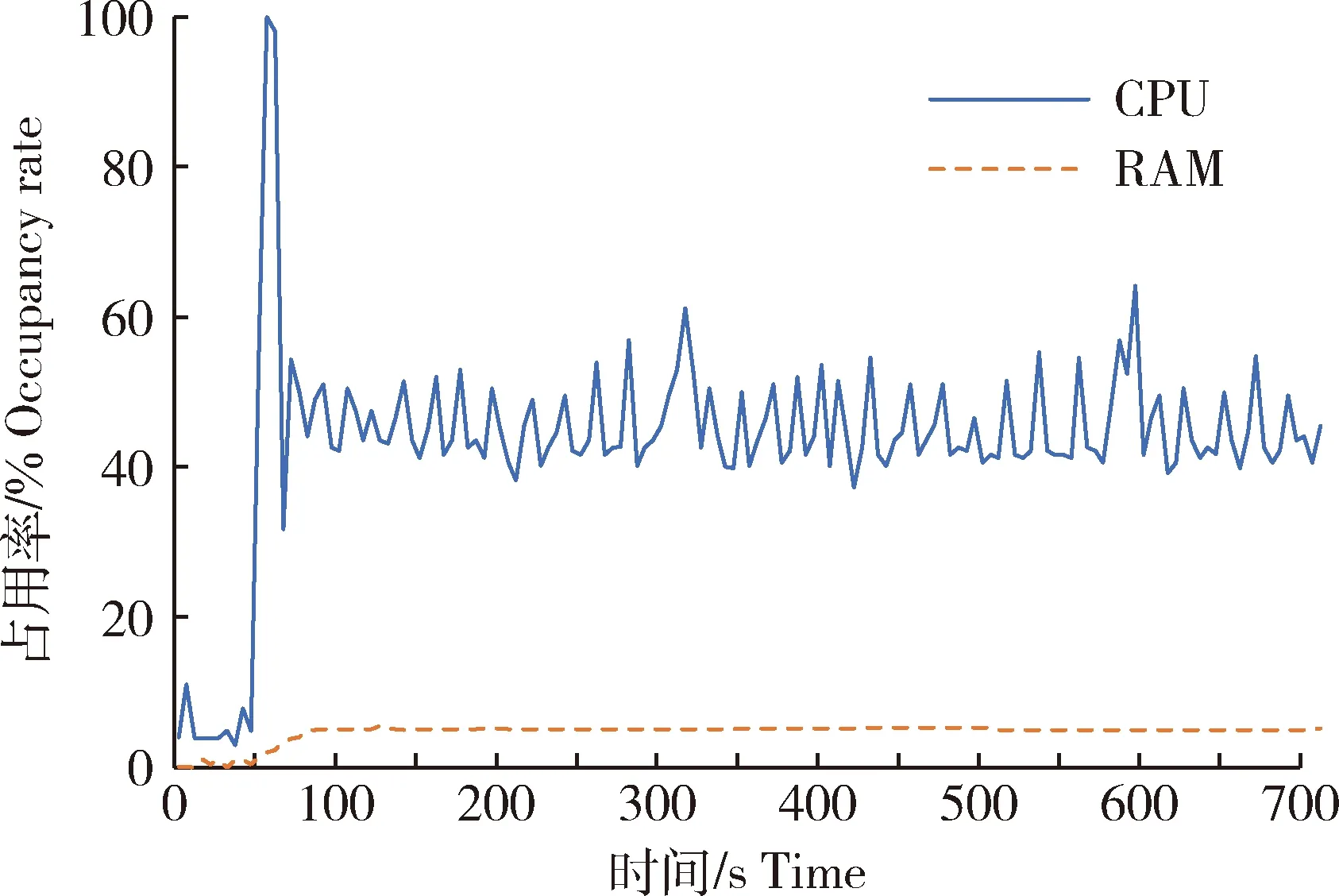
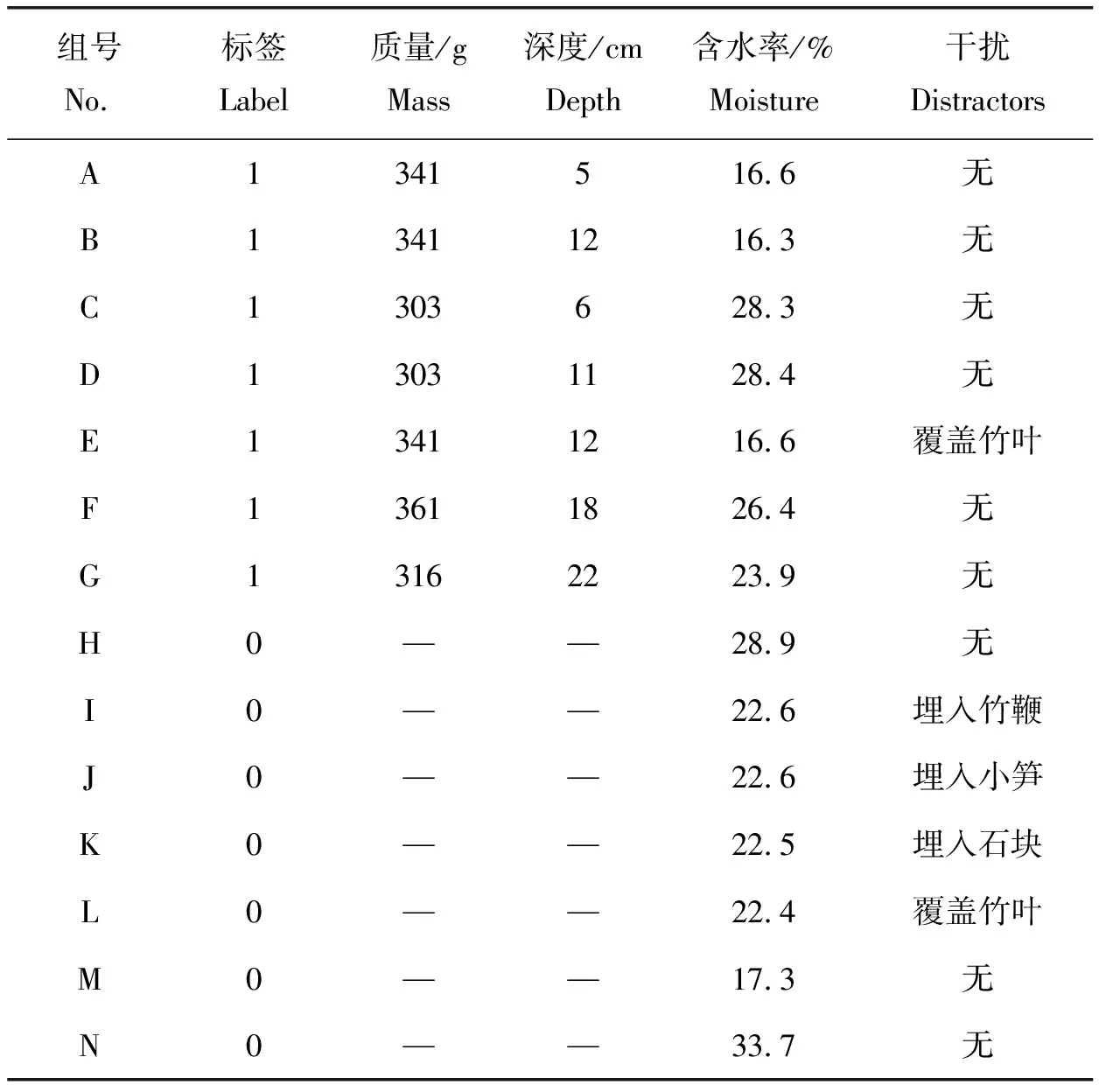
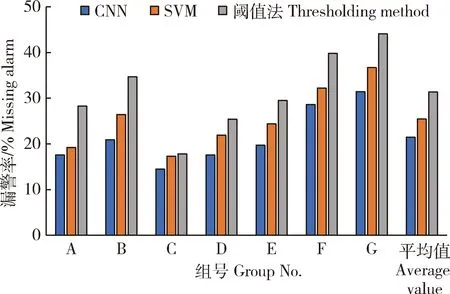
式中:εm为介质等效介电常数;ww为介质中水的质量分数(0 (2) 式中:Eim为天线发射的入射波的幅值;Erm为天线接收的反射波的幅值。将式(1)带入式(2): 通常情况下水的介电常数远大于其他物质即εw≫εs,可得: (3) 由式(3)可见,当物质中水的比重ww越大时反射系数Γ越小,回波的能量越小。由于冬笋的含水率远大于土壤,当电磁波照射在有冬笋的土壤中时其回波信号的幅值会相应的减小,以此作为冬笋探测器的理论依据。 竹林内土壤含水率约为15%~34%,一般为21%。考虑到电磁波对土壤的穿透能力,使用 600~1 200 MHz频段的电磁波依次照射含水率为15%、21%、34%的土壤与冬笋,回波的幅值与频率关系见图1,最终得出在800~900 MHz频段范围内时冬笋和土壤差距最为明显,本研究选用860 MHz 作为探测频率。 图1 不同频率电磁波照射下冬笋和3种 含水率(w)土壤的回波幅度Fig.1 Variation curve of echo amplitude of winter bamboo shoots and soil with three moisture content (w) under different frequency electromagnetic waves 本研究设计的探测装置由发射链路、接收链路、天线和回波信号检测系统组成,原理见图2。信号源产生高频振荡电流经过射频放大器与带通滤波器再送入发射天线,并由发射天线将高频电流转化为无线电波向指定方向辐射;由于辐射路径中土壤等媒介阻抗不匹配产生电磁波反射现象,反射的信号由接收天线转化为高频电流信号并送入接收设备中,并由接收设备对信号进行降噪、下混频、采样等处理;最后将信号送入回波信号检测系统进行决策分类。探测器样机见图3。 图2 冬笋探测器系统原理Fig.2 Schematic diagram of winter bamboo shoot detector system 1.手托;2握柄;3.树莓派;4.电池;5.发送与接收模块;6.阻尼铰链;7.收发天线1.Hand rest; 2.Grip; 3.Raspbian; 4.Battery; 5.Signal sending and receiving module; 6.Damping hinge; 7.Transmitting antenna and receiving antenna图3 冬笋探测器样机Fig.3 Winter bamboo shoot detector prototype 选用由ADI公司生产的ADF4350锁相环系统[16](Phase Locked Loop,PLL)作为发射链路的频率合成单元。并采用ST公司生产的STM32C8T6单片机作为控制芯片对ADF4350进行控制。发送链路见图4:由单片机读取接收树莓派串口数据写入其片内缓存区,并将指令写入ADF4350的寄存器中;ADF4350锁相环系统根据指令生成相应的高频电流脉冲信号。 图4 发射链路结构图Fig.4 Transmission link structure diagram ADF4350是一款集成了鉴相器(PD)和压控振荡器(VOC)的锁相环系统[17],锁相环合成频率的原理见图5。外部晶振TXCO产生时钟信号经过参考分频器得到fR,鉴相器比较fD与fR的相位差输出偏差信号ue(t),环路滤波器(LF)滤除ue(t)中高频分量和噪声后得到uL(t)并控制压控振荡器输出,输出信号fO经过分频得到fD后反馈至鉴相器中,最终fD逐渐接近输入信号fR,直至消除两者频差达到锁定状态。可通过改变2个分频器的分频倍数得到目标频率。 锁相环系统输出信号的最大功率为0 dBm,为提高整体系统的信噪比采用20 dB的射频功率放大器对高频电流信号进行放大。由于压控振荡器输出信号中包含许多谐波成分,因此需要在发射链路中加入带通滤波器滤除杂波。高频电流信号经过放大和滤波后送入发射天线。 RTL-SDR[18]是一款廉价且稳定的软件无线电接收设备,成本通常在100元以内。其主要任务是射频信号向基带信号的频谱迁移。本研究选择的RTL-SDR主要由调谐器R820T和解调器RTL2832组成。天线接收信号首先送至R820T进行预处理,将接收的射频信号下变频为中频(IF),中频信号在RTL2832内完成第2次下变频后变为基带信号再进行采样,采样后的数字信号由USB口送至回波信号检测系统中做处理。 RTL-SDR原理见图6。R820T[17]是一款基于超外差结构的调谐器,其可接收频段范围为24~1 766 MHz。R820T内置低噪声放大器(LNA)、混频器(mixer)、可变增益放大器VGA、带通滤波器BPF,所有模块由I2C与寄存器控制,R820T与RTL2832共用1条I2C总线。 fR、fD、fO分别为参考分频器、可变分频器、压控振荡器的输出频率;ue(t)、uL(t)分别为鉴相器、低通滤波器输出的电压信号;N、M分别为可变分频器与参考分频器的分频倍数。fR, fD and fO are the output frequency of the reference frequency divider, variable frequency divider, and voltage controlled oscillator respectively, Hz; ue(t) and uL(t) are the voltage signals output by the phase detector and low-pass filter respectively; N and M are frequency division multiple of the variable frequency divider and reference the frequency divider respectively.图5 锁相环系统原理图Fig.5 Schematic diagram of phase locked loop system 图6 RTL-SDR原理图Fig.6 RTL-SDR schematic RTL2832是一款高性能DVB-T解码芯片,内嵌高速A/D转换器,理论上最高可采样率为3.2 MSPS,可输出8位IQ信号。RTL2832包含8051内核,仅用于控制I2C传输等并不对采样信号做任何处理。SDR模式下需修改寄存器关闭解调器,使信号直接传输到计算机中。探测器工作时,将RTL-SDR持续传输至树莓派的数字信号按照固定长度截取并处理作为回波检测模型的输入,根据是否满足特征要求,将信号分为存在冬笋与不存在冬笋2类结果,并输出显示在LCD屏幕内。 本研究选用树莓派4B(Raspberry Pi)作为冬笋探测器的控制核心,搭载Raspbian系统,4 G运行内存,在系统内搭建回波序列检测模型,并使用8.9 cm(3.5英寸)LCD触摸屏作为探测器的人机交互界面。树莓派主要负责控制锁相环系统产生指定频率的信号,并对RTL-SDR相应寄存器进行控制,使其按特定的带宽与频率对接收天线的回波信号进行采样,最后将RTL-SDR持续传输至树莓派的数字信号按照固定长度截取,并处理作为回波检测模型的输入,根据是否满足特征要求,将信号分为存在冬笋与不存在冬笋2类结果,并输出显示在LCD屏幕内。构建回波分类模型需先采集样本构建数据集,将样本导入计算机中进行模型训练,最终将训练完成的回波序列检测模型安装于冬笋探测器的树莓派中进行实时检测。 传统的信号分析方法是对数据进行处理,以频谱图、瀑布图等可视化方式展现,并经过人工分辨目标信号特征,这种方式对操作员的专业性要求很高并不适合作为本研究设备的目标检测方式。为了适应冬笋复杂的生长环境,本研究选择了基于深度学习的目标特征检测方法,将目标检测的问题转化为分类问题,与传统特征检测器相比该方法具有更好的鲁棒性和泛化能力。 采用卷积神经网络(Convolutional neural network, CNN)用于提取数据特征以及分类,CNN对数据进行特征提取的前提条件是数据样本满足局部性假设与权值共享假设。采样获得的回波信号序列在相邻点之间具有关联性,且相邻点之间的距离越远关联性越小,因此满足局部性假设条件。当探测范围内存在冬笋,回波序列会出现相应的纹理特征,在某段序列中提取的特征同样适用于其他序列,因此也满足权值共享条件。 本研究的卷积神经网络回波序列检测的实现过程见图7:首先使用设备采集土壤的回波信号样本与土壤中含有冬笋的回波信号样本,将之构建为数据集,然后选择CNN网络模型,用训练集对模型进行训练,用测试集来近似模型的泛化能力,最后进行预测试验对模型进行评估。 图7 卷积神经网络目标分类实现过程Fig.7 The realization process of convolutional neural network target classification 探测器的回波信号反映了探测范围内的物体对电磁波的吸收现象,当土壤中存在冬笋的情况下回波信号较弱,表现为信号能量衰减。 传统研究对于CNN的回波信号目标分析多以频谱图或瀑布图作为输入。徐雅楠等[19]将卷积神经网络应用于海上雷达的目标检测,将1维雷达回波信号构建为数据集,验证了CNN对回波信号分类的可行性。考虑到回波信号转化为图像的过程中可能会丢失部分特征,因此本研究选择直接将信号作为输入。 将SDR中的模数转换器设置为2.4 MSPS采样率对回波信号进行采样,使用抗混叠滤波器滤除采样通道以外的频段防止信号出现频率混叠。SDR设备对信号进行采集时会出现频谱偏移,为了能准确的采集到信号将模数转换器的带宽设置为600 kHz,抽取率恒定为4。每采集0.1 s时间序列的信号为1个样本,每个样本由12 288个复数组成,再以16个随机组成的英文字母命名并保存为npy格式的文件。初始采集数据记为: χ={Χ,y}={x1,x2,…,xn,label},χ∈R 式中:xi为第i个特征采样点对应的特征数据;n表示数据的长度,n=12 288;label为探测范围内是否存在冬笋的标签,采集信号时根据探测范围内是否有冬笋将回波信号样本分为2类,存在冬笋标签记录为1(label=1),不存在标签记录为0(label=0)。 样本采集试验设计如下:在竹林内寻找大小约为0.5 m×0.5 m的空地,测量该范围内边缘及中心的土壤含水率,计算并记录所测含水率平均值。成熟冬笋的单株质量约为0.3~0.6 kg,每次试验时选择不同的冬笋作为测试目标,并将其以模仿冬笋生长的姿态埋于土壤内,记录其埋藏深度,采集信号时需将探测器天线置于土壤表面,同时在0.5 m×0.5 m范围内不断移动探测器天线位置模仿探寻冬笋过程。 为防止数据样本单一对训练结果造成过拟合问题,在采集样本时将土壤含水率、冬笋大小、深度以及土壤表面覆盖竹叶、土壤内存在竹鞭、石块和未成形小笋等干扰设为试验的变量。每采集1 000个样本数据作为1组,采集的各组数据见表1。 表1 回波序列检测模型数据集分布Table 1 Echo sequence detection model data set distribution 表1(续) 以上过程获得数据集包含40 000个样本。将采集样本总数的75%作为训练集用于训练模型,剩下的25%的样本作为测试集用来对模型进行泛化误差估计。采集的样本是由复数形式的数组组成不能直接进行卷积计算,因此需要对数据集进行预处理,本研究的实时信号提取转换过程见图8,最终获得96×128×2的2维矩阵作为回波序列检测模型的输入。 图8 实时信号转换为模型输入信号的实现过程Fig.8 The realization process of real-time signal conversion into model input signal 本研究选用LeNet网络结构,并借鉴了O’shea 在文献中[20]提出的以时域IQ采样为输入的信号调制方式进行分类的CNN的网络参数。LeNet网络共7层,原用于识别手写数字,内部为5×5的2维卷积核,对1维序列信号进行计算时需将卷积核修改为1×n的1维向量,以防止纵轴方向上卷积运算产生无效特征对结果造成干扰。 回波序列检测模型结构见图9。网络的输入是信号样本经过重建后得到的2个96×128的数字矩阵,卷积层1与卷积层2均采用ReLU作为激活函数,其数学表达式如下: 图9 卷积神经网络回波序列检测模型结构图Fig.9 Convolutional neural network echo sequence classification model structure diagram f(x)=max(0,x) 式中:x位输入值;f(x)为函数输出值。只有当输入x≥0时输入与输出相等,否则输出为0。ReLU函数使一部分神经元输出为0值,这样可以降低参数之间的依存关系,一定程度上可以避免过拟合问题的出现。卷积核尺寸与卷积核个数分别为1×3×64、2×3×16,采用padding=same填充方式,可以使得数据在卷积计算前后尺寸保持不变。池化层1与池化层2输出尺寸分别为48×63、23×60,其作用是将特征进行压缩。全连接层1采用ReLU作为激活函数,输入值为23×30×16=11 040,输出值为1 024。全连接层2输出值为类别数2,全连接层2采用SoftMax作为损失函数[21],损失函数表征网络的预测值与实际值之间的差异程度,其输出值与网络的鲁棒性成反比。SoftMax数学表达式如下: (4) 式中:Ls为损失函数输出值;T为分类类别数T=2;a为全连接层输出向量;aj为输出向量a的第j个值。模型的准确率(A)定义如下: (5) 式中:TP为被模型预测为正的正类数,标签为1;TN为被模型预测为负的负类数,标签为0;FP为被模型预测为负的正类数,标签为1;FN为被模型预测为正的负类数,标签为0。 本研究数据处理环境为:IntelCoreI5-8300处理器、NvidiaGTX1050Ti显卡、Windows10系统DELL PC。在Tensorflow框架下,使用Python3.6语言搭建模型,并使用Tensorboard工具对模型训练结果进行说明。使用训练集对模型进行训练,损失函数的输出值见图10(a),当模型迭代次数达到55 000步时损失函数(Ls)逐渐收敛并趋于稳定,最终接近0.432,表明回波序列分类模型适用于探测器回波信号的分类。最终训练结果准确率达到81.13%(图10(b))。 图10 回波序列检测模型训练结果Fig.10 Echo sequence classification model training results 为了验证冬笋探测器的实用性,在浙江省杭州市临安区某地的竹林进行试验,此竹林土壤类型主要为亚热带气候和常绿阔叶林作用下发育而成的红壤土类。 首先使用探测器分别在含水率为16.1%的土壤表面和埋有冬笋的土壤表面采集信号样本,将获得的数据先滤波后进行傅里叶变换,得到频谱图(图11)。有冬笋时回波信号频谱中最大幅值为0 dB(图11(a)),对于单纯土壤样本回波信号频谱 图11 土壤内有冬笋与无冬笋的探测器回波信号频谱图Fig.11 Spectrum of detector echo signal with and without winter shoots in soil 的最大幅值为8.6 dB(图11(b)),两者幅值差异明显由此可以得出电磁波反射法具备探测冬笋的能力。 冬笋探测器工作场景见图12,探测器搭配8 400 mAh 电池可持续工作约2.5 h,手托配合弯曲的握柄可减轻负重感,使用者可在野外实现单手操作。 图12 冬笋探测工作场景Fig.12 Winter bamboo shoot detection work scene 回波序列检测模型工作时占用树莓派CPU与RAM资源情况见图13,第50 s时模型开始工作对上传的回波信号进行检测,约5 s后逐渐稳定,运行时约占用50%CPU与5%RAM,表明树莓派可带动回波序列检测模型稳定运行。 图13 系统运行时中央处理器(CPU)及内存(RAM)占用率Fig.13 Central processing unit (CPU) and memory (RAM) usage when the system is running 考虑到竹林生态结构复杂,当土壤含水率等环境因素发生变化时仅对回波频谱设置阈值容易造成误判,为了验证训练后的回波序列检测模型是否对冬笋探测器的回波信号有良好的分类效果以及应用价值,选择频谱阈值法和传统分类器支持向量机(SVM)2种分类方法作为对比,使用漏警率与虚警率2个指标对上述方法进行评估。漏警率M[22]与虚警率F[23]定义如下: 式中: FN为被模型预测为正的负类数,标签为0;TP为被模型预测为正的正类数,标签为1;FP为被模型预测为负的正类数,标签为1;TN为被模型预测为负的负类数,标签为0; 根据经验,成熟的冬笋大多位于土壤表面至20 cm 深度范围内。使用3.1中描述方法在竹林实地采集,每组采集1 000个样本共采集14组数据,分别编号为A,B,…,N,各组数据分布见表2。可见,A~G组标签为1,均为埋有冬笋样本,H~N组标签为0,均为无冬笋的土壤样本,分别使用回波序列检测模型、阈值法、支持向量机对各组数据进行分类,准确率分别为79.08%、73.76%、66.88%。 表2 回波信号预测集数据分布Table 2 Data distribution of echo signal prediction set 使用回波序列检测模型、阈值法、支持向量机对A~G组样本分类的平均漏警率分别为21.47%、25.45%、31.38%(图14),回波序列检测模型的漏警率最低且分类结果在不同条件下表现稳定,表明在探测过程中漏掉冬笋的概率最低。阈值法漏警率最高且易受土壤含水率、冬笋埋入深度及土壤表面覆盖竹叶等外部因素影响。各组数据结果表明检测模型的漏警率与土壤含水率与冬笋生长深度呈正相关,当土壤表面覆盖竹叶时,对漏警率影响不大。 图14 3种分类方法的漏警率对比Fig.14 Comparison of missing alarm of three classification methods 使用回波序列检测模型、阈值法、支持向量机对H~N组样本分类的平均虚警率分别为20.37%、27.03%、34.86%(图15)。回波序列检测模型在不同干扰场景下虚警率波动较小;支持向量机的虚警率略微高于回波序列检测模型;阈值法的虚警率最高,当遇到不同干扰时虚警率的波动较大。各组数据表明检测模型的虚警率与土壤含水率呈正相关,当土壤内存在未成形的小笋、树根、表面覆盖竹叶等干扰时易引起虚警,土壤内的石块对探测结果影响较小。综上,回波序列分类检测模型对冬笋探测器回波序列分类具有较高的准确率,在不同环境中的漏警率与虚警率均低于SVM与阈值法,符合冬笋探测器的分类要求。 图15 3种分类方法的虚警率对比Fig.15 Comparison of false alarm of three classification methods 针对冬笋采收只能依靠传统的人工经验法的问题,本研究设计了一款冬笋探测器,该探测器硬件上选用2块贴片天线向土壤发射并接收电磁波信号;构建基于卷积神经网络的回波序列检测模型,用于冬笋探测器接收的回波信号分类。回波序列检测模型通过冬笋探测器回波信号判断土壤内有无冬笋的准确率为79.08%,漏警率、虚警率指标均优于频谱阈值法与支持向量机,同时可以适应多种复杂的环境。
2 冬笋探测器设计

2.1 发射链路
2.2 接收链路

2.3 回波序列检测模块
3 探测器回波序列检测模型
3.1 构建数据集

3.2 卷积神经网络结构

3.3 模型训练
4 试验结果与分析

5 结束语