基于线结构光的枕簧三维图像测量系统研究
2021-11-09王永胜宋铁民
王永胜,宋铁民
(中国铁路北京局集团有限公司 石家庄车辆段,河北 石家庄 050222)
目前,车辆段检测货车枕簧高度以接触式检测为主,如图1所示。接触式检测机测量枕簧高度存在检测质量稳定性差、准确性难以控制、检修作业效率低的缺点,造成枕簧高度选配尺寸不够精确。

图1 接触式枕簧检测机
为了解决上述问题,本文设计了一种基于线结构光的枕簧三维图像测量系统,对检测输送线上的枕簧进行动态测量,通过对采集数据进行空间变换与图像处理,得到枕簧三维轮廓信息,完成枕簧自由高度值的测量。经生产验证,该系统检测效率与检测精度高,适用于多种类型的枕簧自由高度测量。
1 系统总体设计
线结构光图像测量技术是一种非接触式光学三维空间测量方法,测量原理如图2所示,使用激光源投射条状光束到被测物体表面,相机面阵感光元件从其他方向接收到物体表面的散射光,依据系统光路的几何参数和感光原件的像点偏移量的标定结果,运用结构光三角测量法[1]可以得到被测物体表面轮廓信息。

图2 线结构光图像测量原理示意图
本文开发的采集装置使用激光源与面阵相机组合固定在高精度伺服电缸平台上,如图3所示,根据相机成像参数和结构光源投射光线分布特点,设置激光源与面阵相机组合的相对位置关系,实现相机对被测枕簧表面轮廓数据的最优采集。基于Visual Studio开发平台、OpenCV视觉类库和PCL点云库完成测量系统软件设计。测量过程中,枕簧输送线将待测枕簧送至指定检测位置后停止,空间标定[2]后的激光源与面阵相机组合通过电缸平台平动扫描枕簧外表面,获得其结构光线条纹数据。然后结合装置空间标定信息应用图像处理技术[3-4]得到枕簧三维点云数据,从而求得待测枕簧的自由高度,主要流程如图4所示。
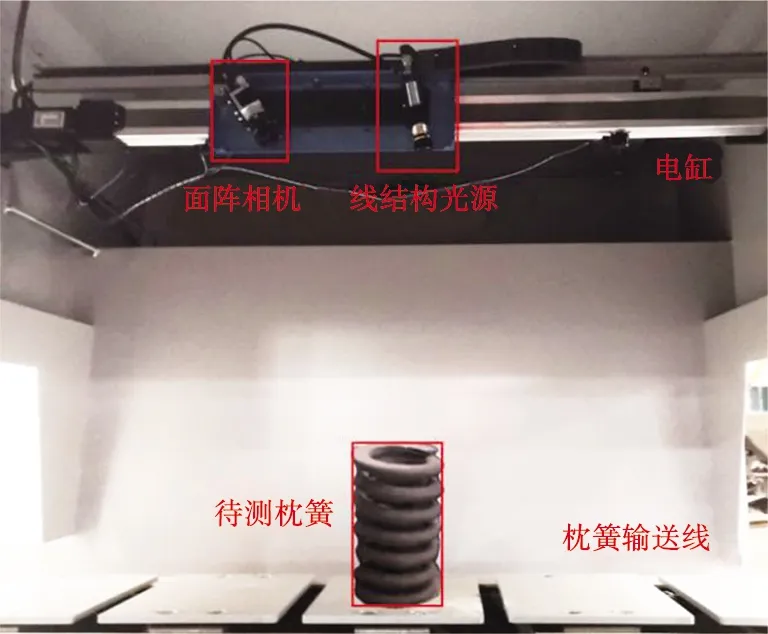
图3 枕簧图像检测装置
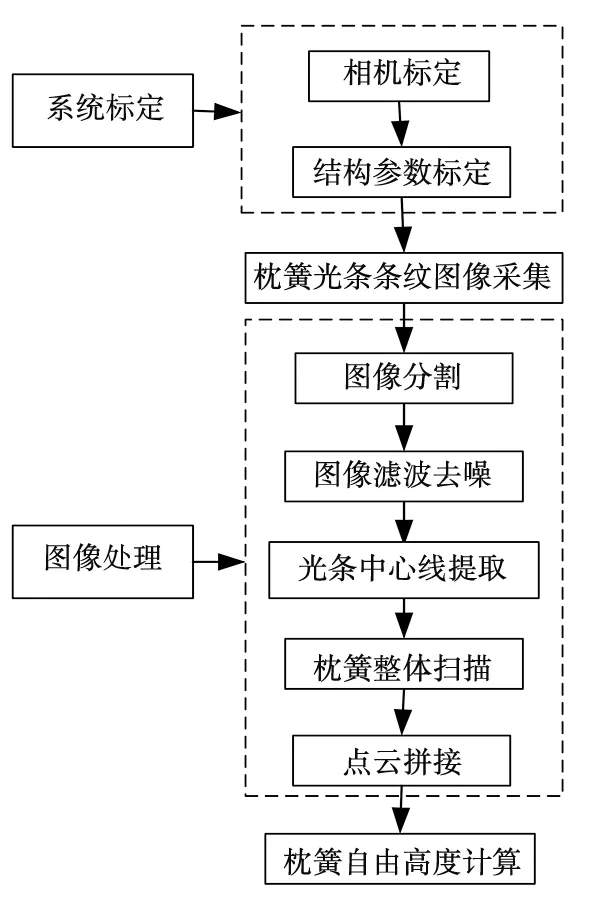
图4 测量系统关键技术流程
2 系统试验
按照铁路货车枕簧检测检修相关文件规定,对枕簧三维图像测量系统从检测精度、稳定性和适应性3个角度进行测试。
2.1 检测精度和稳定性分析
采用测量系统(以下称“本文方法”)和弹簧自由高测量尺(以下称“人工测量”)2种检测方式分别对不同批次的2组(每组10个)转K2型转向架枕簧进行自由高度测量,测量结果如表1所示。
由表1可知,转K2型转向架枕簧自由高度测量值变化范围为0~0.19 mm,平均差值为0.093 mm,测量结果精确度较高。测量标准差为0.054 mm,表明差值波动范围小,测量结果稳定性好。
2.2 适应性分析
使用本文开发的图像测量系统分别对转K2型、转K4型、转K5型和转K6型枕簧套组(共计17种)进行自由高度测量,各类型枕簧自由高度测量值变化范围均不大于0.2 mm,因此,研发的测量系统适用于各型枕簧自由高度测量。
3 结束语
本文研制的基于线结构光的枕簧三维图像测量系统使用激光源与面阵相机组合动态采集被测枕簧表面线结构光图像,通过空间变换与图像处理完成枕簧点云数据的三维重建,从而得到枕簧自由高度值。经生产验证,该测量方法有较高的检测精度,同时稳定性和适用性较强,对提高枕簧检修的技术水平和工作效率具有重要意义。
