动力学与控制
2021-11-09
力学学报 2021年7期
CaputoΔ型分数阶时间尺度Noether 定理(2010-2022,doi:10.6052/0459-1879-21-108)田雪,张毅

结合时间尺度和分数阶微积分,研究含CaputoΔ导数的分数阶时间尺度Noether 定理,为研究复杂系统动力学行为提供了一个新的视角.文中推导出CaputoΔ型分数阶时间尺度Lagrange 方程,分别在特殊和一般无限小变换下给出该系统Noether 对称性的定义和判据,并得到相应的Noether 定理.最后,对分数阶时间尺度Kepler 问题和线性振动系统进行数值计算以验证定理的正确性.
一类新型仿生起竖结构设计及其动力学分析(2023-2036,doi:10.6052/0459-1879-21-176)钱佳伟,孙秀婷,徐鉴,方虹斌

本文提出了一种具有非线性多稳态性质的仿生柔性关节,构建了多节仿生起竖结构以实现生物的起竖功能.本文提出了实现需求起竖构型的结构参数设计准则,并设计了不同起竖节数的仿生起竖结构验证了设计准则的有效性.基于仿生起竖结构不同稳态的吸引盆,研究了仿生起竖结构需求构型的触发条件,这为仿生起竖结构的构型切换提供了理论依据.
基于分数阶磁流变液阻尼器模型的车辆悬架组合控制(2037-2046,doi:10.6052/0459-1879-21-137)张文静,牛江川,申永军,温少芳

建立了含有分数阶Bingham 模型的单自由度1/4 车辆悬架系统模型,利用磁流变液阻尼器对非线性悬架进行振动控制.利用平均法得到了悬架系统在天棚阻尼半主动控制下主共振响应的近似解析解,以及系统的稳定性条件.提出了一种被动控制与半主动控制相结合的组合控制策略,不但能够提高车辆的乘坐舒适性,而且能有效抑制悬架系统的主共振振动幅值.
基于LSTM 模型的飞行器智能制导技术研究(2047-2057,doi:10.6052/0459-1879-20-388)汪韧,惠俊鹏,俞启东,李天任,杨奔
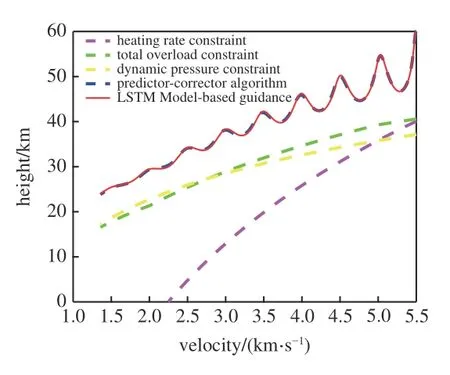
人工智能的突破性进展为飞行器再入制导的研究提供了新的技术途径,本文提出基于LSTM 模型的飞行器智能制导技术.基于再入飞行器的实时状态信息,采用LSTM 模型实时生成倾侧角指令,去除传统预测校正制导中“预测环节”和“校正环节”,制导指令的解算速度提升73.7%,在飞行器再入初始状态和气动参数拉偏情况下具有精度和速度上的双重优势.