四站时差定位精度影响因素分析
2021-11-09袁鹏鹏
袁鹏鹏,赵 玉
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
在电子侦察系统中,以隐蔽性探测和精确性打击见长的无源定位技术具有十分重要的地位。在未来以电子战为主导的高科技战争中,无源定位技术的充分利用能够为赢得战争提供可靠的技术保障。当代电子对抗的发展日新月异。有源系统容易被干扰和攻击。无源雷达的定位技术分为多种,不同的定位方法适用于不同的背景场合、布站方式和定位精确度的要求[1-2]。相比于测角交叉定位法、多普勒频率差定位法,时差定位法具有接收系统简单、布站灵活、定位精度高等显著特征,因此在近年来受到越来越多的研究方重视和关注,成为无源定位系统中应用最为广泛的一种定位技术[3-4]。
1 三维四站时差定位基本原理
三维时差定位系统一般由1个主站和3个副站组成,其定位原理如图1所示。

图1 三维时差定位原理图
图1中,E(x,y,z)为辐射源目标位置,A(x0,y0,z0)为主站位置,B(x1,y1,z1)、C(x2,y2,z2)、D(x3,y3,z3)分别为3个副站位置,r0、r1、r2、r3分别为目标到主站A、副站B、C和D的距离。副站与主站的距离差分别为Δri(i=1,2,3),定位方程表示为:
(1)
Δri=c·Δti=c·(ti-t0)
(2)
式中:i=1,2,3;c=3×108m/s,为电磁波传播速度;Δti(i=1,2,3)为副站与主站的时间差;t0、t1、t2、t3分别为目标到主站A、副站B、C和D的时间。
2 时差定位精度分析
对式(2)两边求微分,可得:
d(ti-t0)=(cix-c0x)dx+(ciy-c0y)dy+
(ciz-c0z)dz+(k0-ki)
(3)

辐射源与观察站位置的相关系数矩阵可表示为:
(4)
令dXs=[k0-k1k0-k2k0-k3],dX=[dxdydz]T,dY=[c·d(t1-t0)c·d(t2-t0)c·d(t3-t0)]T,可得dY=C·dX+dXS,用伪逆法求得的目标定位误差的估计值为:
(5)
令:
(CTC)-1CT=B=(bij)3×3
(6)
因为时间差的测量值中都包括目标到达主站的时间测量值的误差,换句话说,各时间差的测量值中都包含相同的误差因子,所以目标到达各观察站的时间差Δt的测量误差是相关的。假设时间测量值误差修正后是零均值的,且各站址误差是相互独立的,则定位误差的协方差可表示为:
(7)

(8)
式中:σΔt1(i=1,2,3)为第i个观察站的时间测量误差;η12、η13、η23分别是Δt1、Δt2与Δt3间的相关系数。

(9)
令:
(10)

(11)
那么得到x,y,z轴方向上的定位误差方差:
(12)
所以得到三维时差定位的定位精度为:
(13)
3 仿真验证与分析
对于四站系统,采用控制变量法,对比不同基线长度、站址误差、系统测时差误差以及布站形式(采用四站时差定位中典型布站方式Y型、T型)下的GDOP分布,通过MATLAB仿真分析影响定位性能的精度因子。基线为10 km,站址误差为10 cm,测时差误差为10 ns时,Y型布站下的定位精度分布图如图2所示。
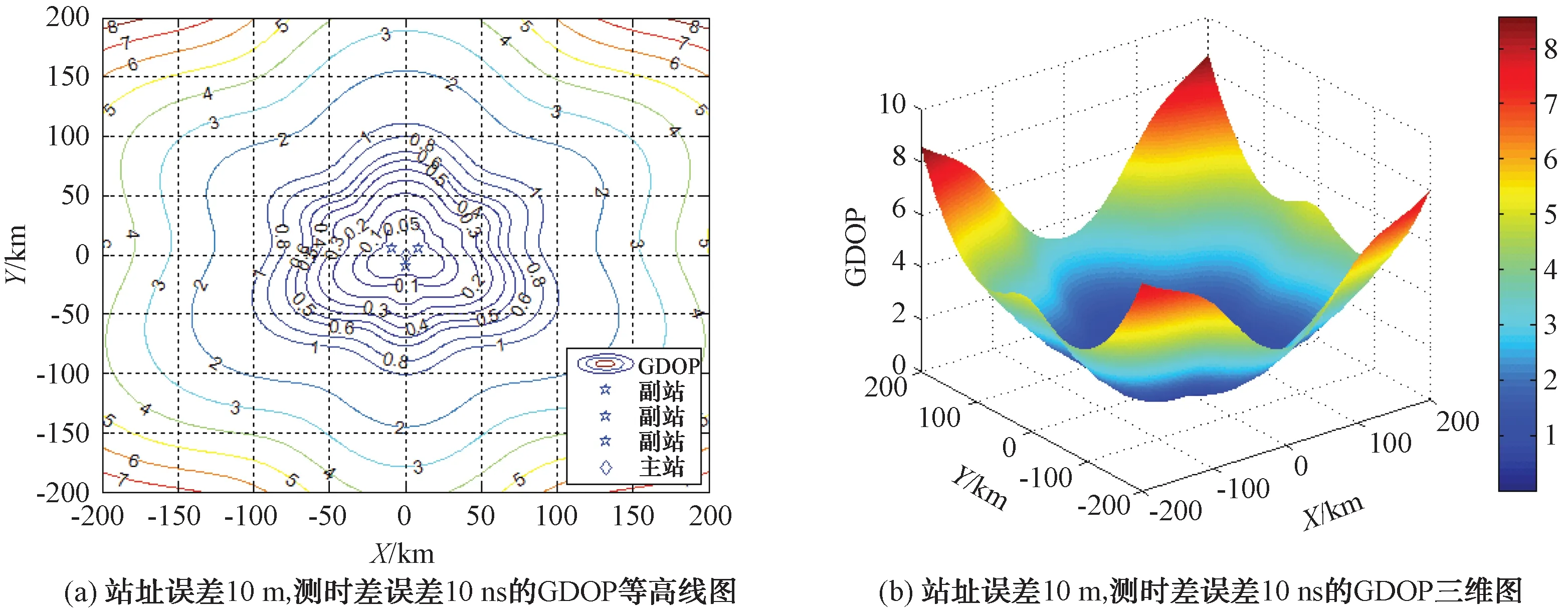
图2 基线10 km,站址误差10 m,测时差误差10 ns,Y型布站下的定位精度分布图
基线为20 km,站址误差为10 m,测时差误差为10 ns,Y型布站下的定位精度分布图如图3所示。

图3 基线20 km,站址误差10 m,测时差误差10 ns,Y型布站下的定位精度分布图
基线为10 km,站址误差为5 m,测时差误差为10 ns,Y型布站下的定位精度分布图如图4所示。

图4 基线10 km,站址误差5 m,测时差误差10 ns,Y型布站下的定位精度分布图
基线为10 km,站址误差为10 m,测时差误差为50 ns,Y型布站下的定位精度分布图如图5所示。

图5 基线10 km,站址误差10 m,测时差误差50 ns,Y型布站下的定位精度分布图
基线为10 km,站址误差为10 m,测时差误差为10 ns,T型布站下的定位精度分布图如图6所示。

图6 基线10 km,站址误差10 m,测时差误差10 ns,T型布站下的定位精度分布图
通过仿真分析可以看出,定位精度与基线长度、站址误差、时间测量误差、定位站布局等因素有关:
(1) 定位误差随辐射源至观察站点距离增大而增大,距离较远时,误差增加较快;
(2) 随着基线长度增大,定位精度变高,但在实际布站中,基线长度又受到站间通信、时差测量误差的制约;
(3) 随着站址误差、时差测量误差增大,定位误差也随之增大;
(4) 主站位于对称结构的几何中心时,定位精度较高。如果想要在某个方位上获得更高的定位精度,可采用T型布站;如果想要在全方位获得较好的定位精度,可采用Y型布站。
4 结束语
本文分析了三维四站时差定位的基本原理,给出了时差定位精度模型公式,通过仿真给出了不同基线长度、站址误差、系统测时差误差以及布站形式下的GDOP分布,比较分析得出了三维四站时差定位精度的影响因素。
