空间光电跟踪系统闭环全物理仿真试验技术
2021-11-09王田野崔本杰吴泽鹏
王田野,崔本杰,刘 鹏,吴泽鹏,崔 凯
(1. 上海卫星工程研究所,上海 201109; 2. 中国科学院 西安光学精密机械研究所,西安 710119)
0 引言
空间光电跟踪系统具有跟踪精度高、响应速度快、抗干扰能力强的优点,可搭载在卫星平台上对非合作目标进行捕获、跟踪和瞄准,在空间安全与维护、空间碎片观测、激光通信、天文观测等领域发挥着重要作用。空间光电跟踪系统跟踪控制的核心组件为二维跟踪转台,通过二维跟踪转台驱动控制实现对目标的快速捕获跟踪。在空间微重力、近无摩擦力学环境下,二维跟踪转台与卫星平台间的动力学耦合特性复杂,特别是在对非合作目标跟踪过程中,二维跟踪转台的运动产生的干扰力矩作用在卫星平台上会引起卫星平台振动,进而影响空间光电跟踪系统的跟踪精度。因此需要重点分析卫星平台和空间光电跟踪系统间的动力学耦合影响。
为了保证星载空间光电跟踪系统在轨成功应用,必须在地面进行充分验证,考核其在复杂动力学耦合影响下的跟踪指向精度和稳定度。目前的验证方法主要包括数学仿真和单轴气浮台试验:二维跟踪转台和卫星平台之间的干扰力矩传递机理十分复杂,其动力学耦合特性无法通过数学方法精确建模,因此仅通过数学仿真很难验证空间光电跟踪系统的跟踪性能;单轴气浮台试验方法的原理是利用气浮止动轴承实现单方向的微重力动力学环境,以模拟空间光电跟踪系统与卫星平台的耦合特性,进而考核系统的跟踪精度,但实际上二维跟踪转台对卫星平台的影响在三轴方向均有体现,仅通过单轴试验无法予以充分验证。
为了解决空间光电跟踪系统的地面验证难题,本文将三轴气浮台与空间光电跟踪系统相结合,提出闭环全物理仿真试验方法:利用三轴气浮台模拟卫星在轨动力学环境,同时利用空间光电跟踪系统进行非合作目标跟踪控制,实现光电跟踪与耦合动力学的共同模拟,可对系统的跟踪精度进行定量评估。以某典型二维空间光电跟踪系统为例,开展闭环全物理仿真试验方法研究。
1 空间光电跟踪系统原理
空间光电跟踪系统主要由光学成像系统、信息处理系统和二维跟踪转台组成,可实现对空间非合作目标自闭环跟踪。其中:光学成像系统对空间目标进行光学成像;信息处理系统对光学成像系统拍摄的图像采用星图识别算法进行处理,通过多帧相关运动特征检测确定并捕获视场中的目标;二维跟踪转台是空间光电跟踪系统的运动执行机构,可实现空间区域扫描和动态跟踪。脱靶量是描述空间光电跟踪系统的一项重要指标,指光学成像系统测量到的目标实际方位与理想方位间的偏差。
空间光电跟踪系统动态跟踪的工作原理如图1所示:控制系统的测量信息是目标的方位信息,先由光学成像系统拍摄到目标,再由信息处理系统检测图像识别出目标方位。控制系统的执行机构是二维跟踪转台,通过电机的三环(位置环、速度环和电流环)控制实现二维指向,并根据测量信息反馈进行调整,使目标尽可能处于光学成像系统的视场正中心,最终实现对非合作目标的动态跟踪。
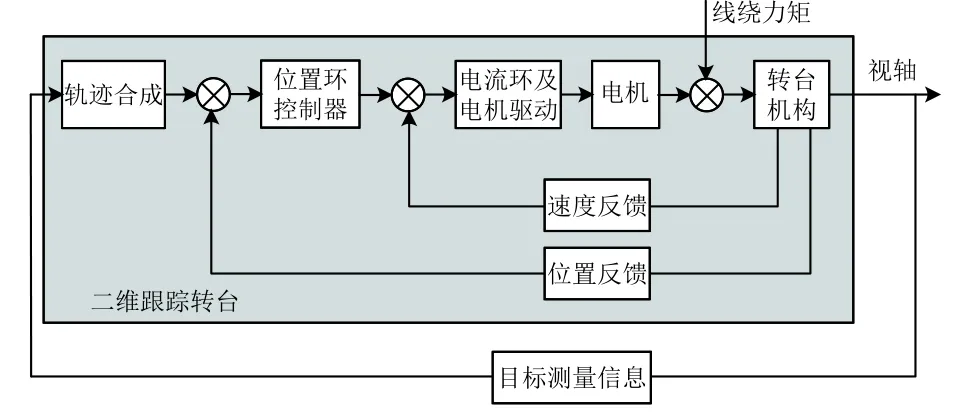
图1 光电跟踪系统工作原理Fig. 1 Principle of the electro-optical tracking system
2 试验方法
全物理试验的总体思路是在地面真实模拟空间光电跟踪系统对非合作目标的动态跟踪,验证光电跟踪系统与卫星平台在动力学耦合作用下的跟踪精度。试验系统由三轴气浮台、目标源系统和空间光电跟踪系统3 部分组成,如图2 所示。其中:三轴气浮台可模拟浮动卫星平台在轨零重力、微扰动的空间环境;目标源系统用于模拟空间非合作目标的运动;空间光电跟踪系统用于执行目标捕获与跟踪任务。
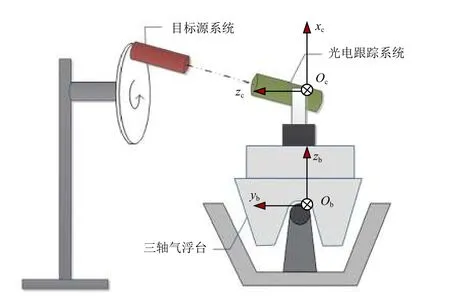
图2 全物理试验系统组成示意Fig. 2 The pure physical experiment system
为了清晰描述二维跟踪转台和三轴气浮台的角度关系,定义三轴气浮台参考坐标系、三轴气浮台本体坐标系和二维跟踪转台坐标系。
三轴气浮台参考坐标系O
x
y
z
:坐标系原点O
为三轴气浮台的转动中心,x
轴指向当地地理正东方向,y
轴指向当地地理正北方向,z
轴指天,构成右手系。三轴气浮台本体坐标系O
x
y
z
:为三轴气浮台本体固连坐标系,初始姿态下,本体坐标系与参考坐标系完全重合。二维跟踪转台坐标系O
x
y
z
:坐标系原点O
为二维转台俯仰轴的回转中心,x
轴代表二维转台的偏航轴方向,与三轴气浮台本体坐标系的z
轴平行,y
轴与二维转台的俯仰轴平行,z
轴按右手系确定。当二维跟踪转台处于零位时,z
轴代表光学成像系统的中心光轴,且与三轴气浮台本体坐标系的y
轴平行,如图2 所示。试验过程中,目标源系统采用单轴旋转驱动方式,在非合作目标的跟踪过程中,可通过调整目标源系统的转动速度改变目标的运动特性,以验证空间光电跟踪系统对于不同转速目标的跟踪精度。非合作目标运动与空间光电跟踪系统的相对几何关系示意如图3 所示。
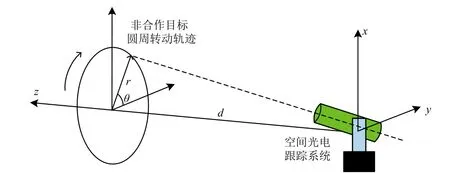
图3 光电跟踪系统与目标运动相对几何关系Fig. 3 The relative geometric relationship between the electro-optical tracking system and the target
若非合作目标的圆周运动半径为r
,目标源系统到空间光电跟踪系统的距离为d
,则非合作目标的运动轨迹可写为
3 运动部件重力干扰力矩的补偿
光电跟踪系统的二维跟踪转台存在安装误差以及材料的不均匀性,将导致转台的活动部件质心偏离转轴,在地面受到重力的影响时会产生重力干扰力矩,从而影响跟踪精度。试验过程中,空间光电跟踪系统的核心难点是解决运动部件的重力干扰力矩问题,主要体现在:
1)二维跟踪转台质重且转动范围大。以本试验涉及的二维跟踪转台为例,其活动部件的质量约为250 kg,在0.015 N∙m 重力干扰力矩下的质心偏差量为6 μm,而现有的测量设备无法直接测量出该量级的质心偏差;
2)重力干扰力矩校正时,转台的内、外框架存在耦合作用,内框架的质量变化会对外框架的质心产生影响。
为了实现重力干扰力矩的补偿校正,保证重力干扰力矩小于0.015 N·m,提出基于整星姿态动力学的质心偏差辨识方法。
3.1 动力学建模
三轴气浮台轮控状态下的姿态动力学方程为

J
为光电跟踪系统安装在三轴气浮台后的综合转动惯量矩阵;ω
为陀螺测量的台体角速度;H
为姿控系统反作用飞轮的角动量;m
、m
分别为光电跟踪系统内、外框架转动部件的质量;ρ
、ρ
分别为内、外框架转动部件质心到转轴的位置矢量;M
为三轴气浮台干扰力矩。根据式(3),可通过三轴气浮台的动力学响应测量二维跟踪转台在不同角度下的重力干扰力矩,并采用最小二乘迭代法求解出转动部件质心到转轴的位置矢量,以便进行重力干扰力矩校正。为了消除内、外框架的耦合问题,遵循先内后外的校正原则。以内框架重力干扰力矩校正为例,当内框架转动θ
角时,在闭环控制下,式(3)可改写为
θ
角引起的重力干扰力矩为T
=m
gθ×ρ
。闭环控制稳态时,T
>>M
,且ω×H
≈0,则式(4)可改写为
x
,y
,z
),当内框架绕y
轴顺时针旋转θ
角时质心的坐标为(x
,y
,z
),如图4 所示。根据坐标旋转定义,可推导出:
图4 运动部件干扰力矩辨识原理Fig. 4 Principle of identifying the disturbance torque

x
为内框架x
方向的静不平衡量;z
为内框架z
方向的静不平衡量。由式(4)可以看出,内框架角转动时,质心在x
和z
方向产生了变化,其中,x
方向的质心变化会引入y
方向的干扰力矩,
3.2 静不平衡辨识及补偿
从式(7)可以看出,内框架转动到1 个位置,可以得出1 个方程,为了求解2 个未知数,需要至少转动2 个位置。经过多次测量,将测量结果带入式(7),得到:
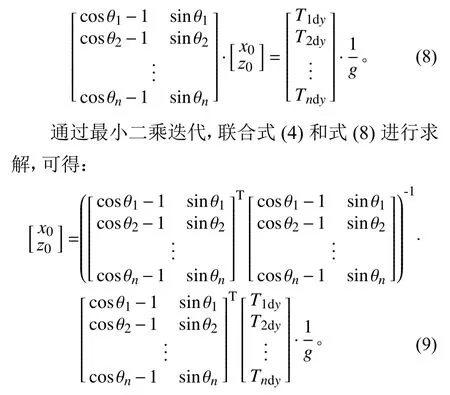
根据式(9),可测量出内框架的静不平衡量,再通过增加配重的方式将内框架的质心调整至转轴中心,以尽可能消除重力干扰力矩的影响。
同理,可得出外框架重力干扰力矩辨识结果:

3.3 校正方法试验验证
通过试验对转动部件重力干扰力矩校正方法进行了验证。在二维跟踪转台45°运动范围内,综合干扰力矩不超过0.009 N∙m,满足试验需求的情况下,试验结果如图5 和图6 所示。
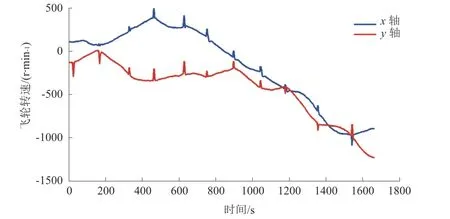
图5 反作用飞轮转速变化曲线Fig. 5 Curve of speed variation of the reaction flywheel
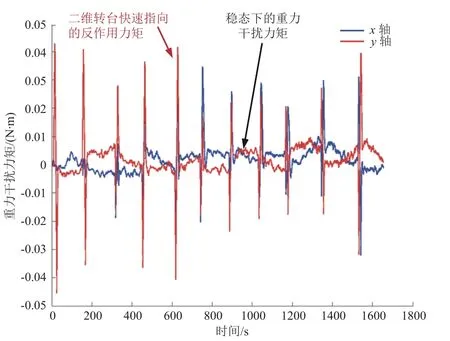
图6 综合干扰力矩曲线Fig. 6 Curve of comprehensive disturbance torque
4 试验结果
本文以某型卫星空间光电跟踪系统的技术指标为例,通过改变目标源系统的转动角速度,模拟空间光电跟踪系统对不同运动速度目标的跟踪精度。根据式(2)推导的空间光电跟踪系统跟踪速度与非合作目标运动速度的相对关系,得出详细工况,如表1 所示。

表1 各工况对应的跟踪速度Table 1 Tracking speed corresponding to each working condition
在试验过程中,空间光电跟踪系统的成像分系统捕获到运动靶标后,通过驱动二维跟踪转台保持对目标的连续跟踪,通过卫星的姿态稳定度评估空间光电跟踪系统对卫星平台的影响,通过成像分系统捕获到的目标位置评估动力学耦合作用下的跟踪精度。
试验期间卫星平台的姿态角和姿态角速度曲线如图7 和图8 所示。光电跟踪系统的二维转角和脱靶量曲线如图9~图12 所示;根据试验结果,统计得到不同跟踪速度下的目标跟踪脱靶量见表2。
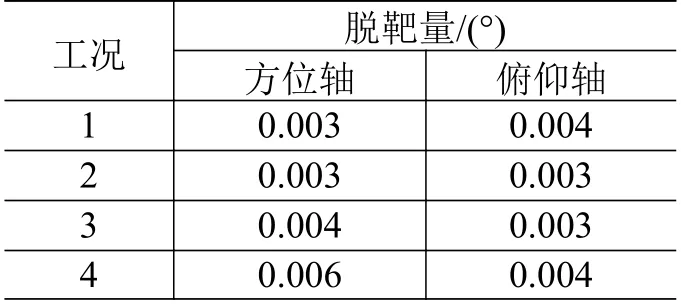
表2 卫星姿态控制和跟踪控制结果Table 2 The satellite attitude control and tracking control results

图7 卫星姿态角曲线Fig. 7 Curve of the satellite attitude angle
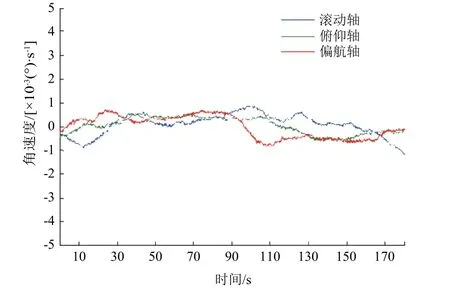
图8 卫星姿态角速度曲线Fig. 8 Curve of the satellite attitude angular velocity
图9 工况1 的跟踪控制结果Fig. 9 Tracking control result for working condition I

图10 工况2 的跟踪控制结果Fig. 10 Tracking control result for working condition II

图11 工况3 的跟踪控制结果Fig. 11 Tracking control result for working condition III
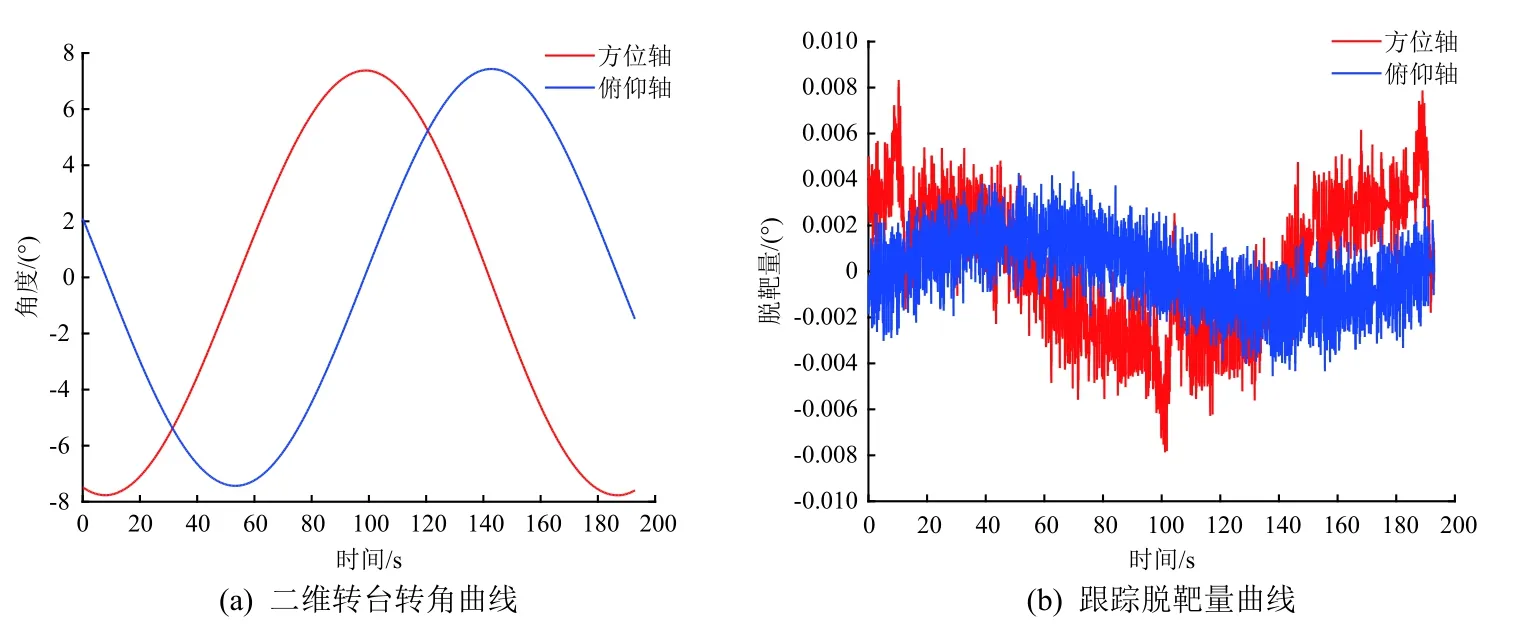
图12 工况4 的跟踪控制结果Fig. 12 Tracking control result for working condition IV
根据试验结果,目标跟踪期间卫星平台的指向精度优于0.04°(3σ
),姿态稳定度优于0.001 (°)/s(3σ
),跟踪脱靶量优于0.006°(3σ
),满足在轨应用需求,表明空间光电跟踪系统的闭环跟踪控制方案能有效克服卫星平台姿态变化对跟踪控制的影响。5 结束语
本文基于空间光电跟踪系统原理,建立试验系统,对某典型二维空间光电跟踪系统开展了闭环全物理仿真试验方法研究。基于整星姿态动力学的重力干扰力矩辨识及补偿可实现转动部件地面试验过程中的重力干扰力矩校正,二维跟踪转台45°运动范围内的重力干扰力矩不超过0.009 N∙m,满足试验需求。全物理仿真试验结果表明空间光电跟踪系统可有效补偿卫星平台姿态变化影响,跟踪脱靶量优于0.006°(3σ
)。在非合作目标跟踪过程中,若目标运动速度较快,会产生明显的相位滞后。在后续的空间光电跟踪系统的闭环跟踪控制方案设计时,可考虑通过对目标运动特性实时估计的方法进行前馈校正,补偿相位滞后特性,进一步提升系统的动态性能。
