基于ViCANdo 的ADAS 摄像头安装高度研究
2021-11-08吴方义刘卫东王爱春黄少堂
吴方义, 刘卫东, 王爱春, 黄少堂
(江铃汽车股份有限公司, 江西 南昌 330001)
随着汽车保有量的不断提高和公路运输行业的发展,交通事故发生的频率次数也不断上升。针对当前的形势,我国相继发布了相关法规,对商用车智能驾驶辅助系统的配备做出了强制规定,以在政策层面推动主动安全系统在商用车领域的量产落地。乘用车方面,伴随汽车四化的发展,汽车智能化也得到了空前发展,驾驶辅助功能的配置率逐渐增高。而目前多数的ADAS传感器的算法都是基于乘用车进行训练开发,针对不同的车型,传感器的布置位置和方式大相径庭,势必影响传感器的感知能力。本文将研究一款乘用车摄像头在轻型商用车上的功能性能差异。
1 驾驶辅助系统组成
1.1 驾驶辅助系统原理
汽车驾驶辅助系统的构成和系统原理如图1所示,主要由感知、决策、控制模块组成。目前,感知模块主要由毫米波雷达、摄像头、360°环视系统、超声波雷达,能实现自动泊车 (APA)、自适应巡航 (ACC)、紧急制动 (AEB)、盲区监测 (BSD)、车道保持辅助 (LKA)、交通拥堵辅助 (TJA)等功能,而更高级别的自动驾驶还有激光雷达。车载传感器感知前方道路上障碍物、车道线、交通标志、行人等信息。前向ADAS功能主要是使用摄像头和毫米波雷达获取前方目标相对距离、相对速度,通过决策与控制实现自适应巡航、紧急制动、交通拥堵辅助功能。摄像头还可识别前方道路车道线,计算车辆与车道线的相对位置和车道线的曲率半径,结合车辆的底盘转向特性,实现LKA功能。可以看出单摄像头可以实现L2级智能驾驶的所有功能,是性价比最高的传感器,如表1是不同传感器的性能对比。
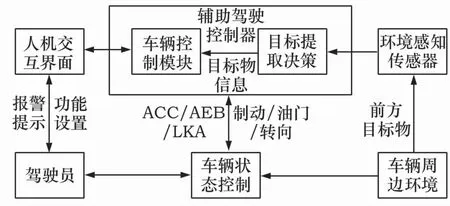
图1 智能驾驶系统组成

表1 智能驾驶感知传感器性能对比
1.2 摄像头目标识别原理与布置问题
摄像头和摄像头后处理芯片端原理如图2所示。摄像头的光感原件识别外界图像信息并转化为电信号,根据编码协议编码图像信号,通过低电压差分信号 (LVDS)传输方式将图像传输至图像处理芯片 (ECU),经过图像信号品质处理后,再传递至图像处理单元 (GPU),利用深度学习或机器学习算法识别图像中不同层次目标 (道路、行人、车辆、障碍物)。目标识别效果依赖于深度学习的样本的类型和数量,因此深度学习目标识别的样本需要不断迭代和更新,不同的学习样本会产生不同的视觉效果,这也是摄像头高度会影响ADAS功能性能的根本原因。
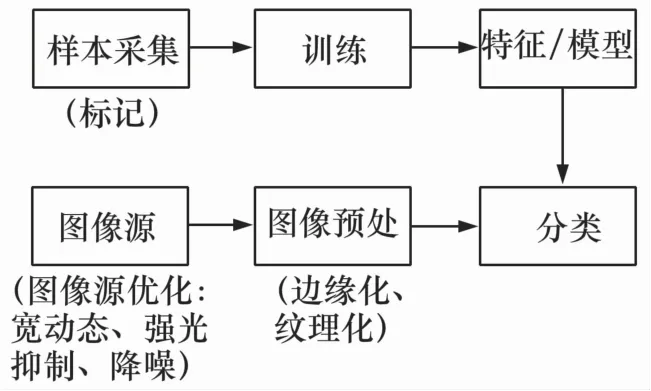
图2 智能驾驶摄像头目标识别原理
如图3和图4所示,不同摄像头安装高度下,其成像差异较大,这就好比人的眼睛,在不同高度和视角对同一物体的认知是不一样的。所以不同的摄像头高度,对目标识别是有较大影响的,需要测试其性能是否能满足相关要求。如果不能满足就需要对特定的高度做针对性的图像识别算法调整,以提高目标识别的准确率。特别是对于“商乘并举”的车企来说,车型差异较大,一款摄像头需要适配多种车型,需要对不同高度下的摄像头性能进行验证,才能确保产品的稳定性。下面将以某款轻型商用车摄像头安装高度的验证,来研究一款摄像头适配不同车型安装高度的差异性。

图3 摄像头安装高度1.5m时车辆/车道线成像

图4 摄像头安装高度2.1m时车辆/车道线成像
2 测试方法
2.1 测试目的
测试摄像头安装高度分别在1.50m、2.1m和2.4m下的FCW、LDW功能的性能对比。
2.2 测试步骤
1)参考国标GB/T 26773,分别测试偏移车速为0.3m/s、0.5m/s时的LDW报警时刻车辆前轮相对于车道线位置。单次报警测试,最早报警线应小于0.75m (车道线内侧);最晚报警线为车道线外沿之外0.3m (乘用车)或1m (商用车)。
2)分别测试纵向车速30km/h、40km/h、70km/h、80km/h时的FCW功能中摄像头的识别偏差;TTC报警阈值,参考国标GB∕T 33577,TTC不大于4s即可,但本次测试使用了如表2推荐的报警经验值。

表2 智能驾驶感知传感器性能对比
3 实车测试
验证测试以某款轻型商用车 (配备前碰撞预警功能和车道偏离预警功能)为例,进行摄像头安装高度对报警性能影响的研究。
3.1 测试设备搭建
如图5所示,测试设备以ViCANdo为核心,进行视频、数据、报警信息的同步采集以及结果输出。FCW的测试为场地内的测试,还会用到假车,图6为假车与ViCANdoLDW测试界面示意图。
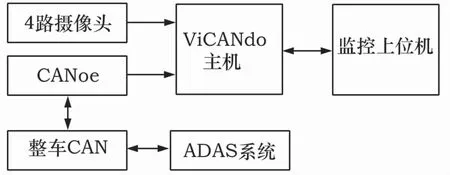
图5 测试系统原理框图

图6 测试设备与ViCANdo测试界面示意图
3.2 实车测试结果
摄像头高度分别为2.4m/2.1m/1.5m时,测试记录LDW功能中摄像头识别到的车道偏离报警位置。如图7所示,图中灰色区域代表实际车道线,宽度为0.15m;数据点位置为实际偏移报警时刻车辆位置;横坐标表示距车道线边缘实际距离;纵轴坐标无实际物理意义,只代表报警时刻先后。3种摄像头高度分别选取20组偏移数据,各组偏移车速为0.3m/s。图8是偏移车速为0.5m/s,测试记录LDW功能中摄像头识别到的车道偏离报警位置。从测试结果可知,不同高度摄像头安装位置的TLC告警时刻满足上述LDW通过准则,但摄像头高度越低,报警点更接近车道线,即报警准确率更高,更及时有效提醒驾驶员车偏离车道。然后偏移车速越大,摄像头高度对识别偏差的影响越明显。
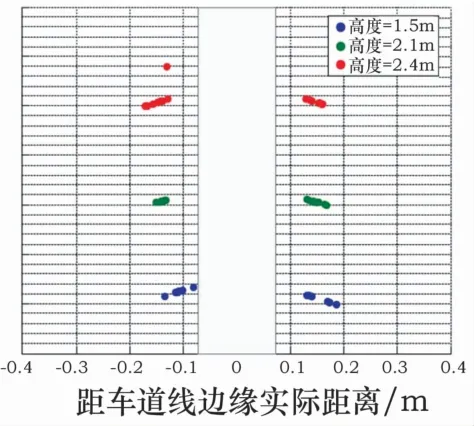
图7 偏移车速为0.3m/s时LDW报警点

图8 偏移车速为0.5m/s时LDW报警点
摄像头高度为1.2m和分别将摄像头高度修改为2.4m/2.1m/1.5m时,测试记录FCW功能触发时的时刻。如图9~图12所示,分别为本车车速为30km/h、40km/h、70km/h和80km/h时,记录的FCW功能触发时刻,横坐标表示碰撞时间TTC,纵轴坐标无实际物理意义,垂直于x轴的直线分别代表上述两级报警TTC阈值,各种摄像头高度分别选取10组数据。从测试结果可知,不同高度摄像头安装位置的TTC误差约-8%~13%,各个工况下,不同高度,一级报警TTC误差较大,对距离识别的误差也越大,在车速高的情况下更加明显,说明摄像头高度的不同对远距离的识别影响较大。

图9 偏移车速为30km/h时FCW报警点

图10 偏移车速为40km/h时FCW报警点

图11 偏移车速为70km/h时FCW报警点
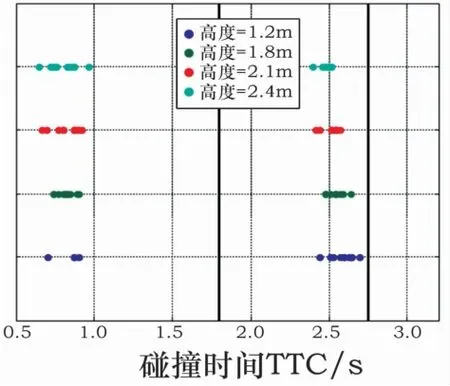
图12 偏移车速为80km/h时FCW报警点
4 结论
本文介绍了ADAS系统结构与原理,以及感知模块摄像头图像感知的优缺点,着重介绍了摄像头安装高度对图像识别的影响和对ADAS功能性能的影响。并通过在对某款轻型商用车的测试验证,用测试结果说明摄像头安装高度对图像识别和对ADAS功能性能的影响。
