基于视觉的重型车辆车道保持控制方法
2021-11-08任文峰
付 行, 任文峰, 王 凯
(陕西重型汽车有限公司, 陕西 西安 710200)
车道保持研究方法较多,基于位置偏差和横摆角误差模型[1],能很好地控制车辆进行车道保持。基于单目视觉的车道保持[2]对如何识别车道线进行了详细说明。通过检测车辆位置相对于车道中心线的偏移量,根据设计的控制规律计算出转向盘转角大小和方向[3]。基于位置偏差和航向角偏差的联合控制模型[4],仿真验证效果较好。本文主要突出介绍车道保持控制方法,本文介绍横向控制理论在车道保持中的应用原理以及PD控制算法,应用Simulink和TruckSim联合仿真和实车验证控制算法的合理性和有效性。
1 车道保持系统方案设计
视觉传感器采集车道信息,通过CAN线传入上位机系统,以车辆质心实际位置和车道中心的横向偏移为输入,通过预瞄理论结合PD控制算法计算输出转角,通过CAN线输出给底层下位机控制系统控制车辆在车道内行驶。
1.1 硬件
车道保持系统所用到的硬件设备有Mobileye视觉传感器,用于感知道路信息,主要是车道曲率、斜率、车道宽度等信息。为了便于快速开发系统,车道保持的计算平台选择的是工控机,该工控机集成CAN卡便于接收视觉传感器信息和向底层发送控制命令,电机控制器收到控制指令。车道保持测试平台是我厂生产的第3代重型越野车,配备了电动助力转向电机。系统硬件架构如图1所示。
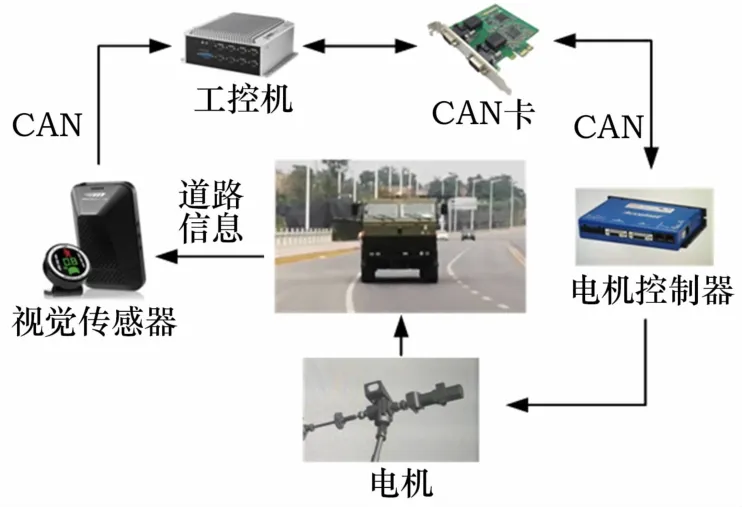
图1 硬件架构图
1.2 软件系统
该软件系统基于C#开发,应用多线程技术将传感器数据接收解析和横向控制算法分离执行,使得数据接收和控制算法互不影响,提高了系统可靠性。车道保持的软件系统如图2所示。视觉传感器感知获取道路数据,按协议解析后会得到车道线曲率ρ为二次项数,在直道时ρ接近于0。还能获知一次项系数k、距离左边车道的距离dl,距离右边车道的距离dr等信息。由此可得道路中心线方程为:
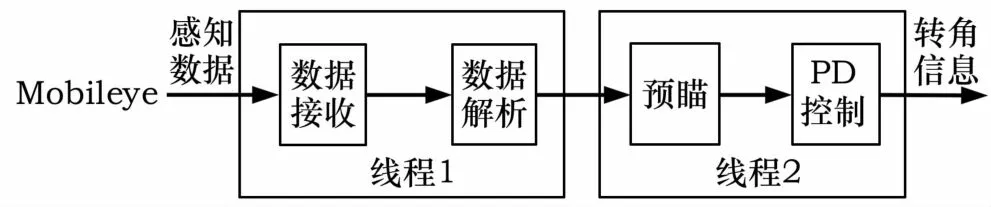
图2 车道保持软件系统

式 (1)中以摄像头为原点,x为车辆行驶方向,y为垂直于x轴向右,(dl+dr)/2为视觉传感器和车道中心的横向偏移量。
2 控制策略
车道保持系统主要研究的是通过横向控制策略控制车辆在车道内稳定快速行驶,本文研究将横向位置偏差作为控制量,通过PD算法调节系统响应和超调,输出控制车辆转向的方向盘转角。同时加入车辆横向约束,限制道路曲率变化较大时带来的不稳定性问题。
2.1 横向控制算法
预瞄理论是参照驾驶员开车时眼睛注视道路前方,控制方向盘使车辆按照驾驶员的意愿向前行驶。向前预瞄的距离与车辆速度、道路曲率等因素有关[5]。本文在研究时纵向控制约束限定速度会随着道路曲率的增大而减小,所以这里不加入道路曲率对预瞄距离的约束,只考虑速度对预瞄距离的影响。当速度较快时,预瞄距离质心应远一些,当速度较慢时预瞄距离车辆质心近一些。如图3所示,假设车辆位于车道线左边 (右边与左边情形类似),矩形框代表车辆,质心为O。从车辆质心O沿着车辆航向方向向前预瞄一定距离OB为d,B就是预瞄点。点B向车道中心线做垂线相交于点C,BC是车辆预瞄点的横向偏差ds。这里设定在车道线左边的横向偏差为负,右边的横向偏差为正。
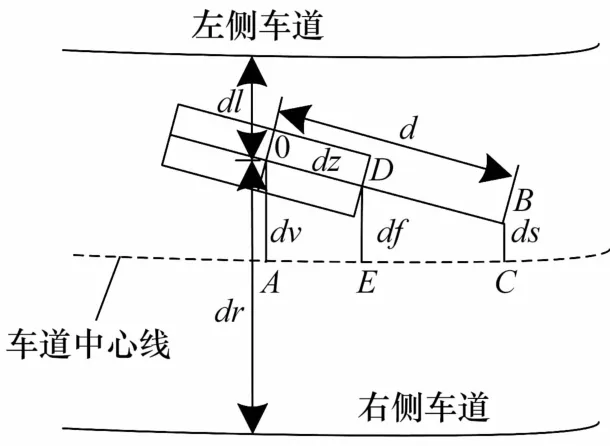
图3 横向偏差示意图
设预瞄距离OB为λv,λ是速度v的倍数,所以以摄像头为原点,点B的坐标为 (0,λv)。点B的坐标已知,求点B到道路中心线的距离ds,由式 (1)可知道路中心线的方程已知,则点B到道路中心线任一点的距离ds平方为:

为了简便,令f=ds2。要求点B到中心线的距离就是求点B到道路中心线的最近距离,因此式 (2)对x求导得:

这是条件极值问题,求函数的极小值可得点C(x,y)就是道路中心线离预瞄点最近的点,进而可求得预瞄横向偏差ds。
考虑到重型卡车自身质量、体积较大、惯性较大等特征,单独使用预瞄前向控制会引起调节响应过慢,车辆进入稳态时间较长。本文引入车辆质心横向偏差作用修正车辆和车道线的位置偏差。点O到车道中心线的距离OA为dv。由式(1)可知,视觉传感器和道路中心线的距离为:

根据相似三角形对应边成比例,可知dv:

以车辆前向预瞄的横向偏差与质心的横向偏差共同作用作为PD控制的输入量进行控制,这里约定位置偏差为 :

式中:m,n——比例系数,m和n之和为1。
2.2 PD控制
如图4所示,车道保持控制的目标是通过控制方向盘角度减小与车道中心线的位置偏差。以2.1位置偏差为控制输入,通过PD参数控制环节,调整响应速度和减小超调。

图4 基于位置偏差的控制
PD控制量比例增益P主要调节方向盘转角大小,车速低时P值大,高速时P值小。控制量D (微分系数)影响自动驾驶系统的响应速度,可消除或减弱系统惯性以及滞后带来的振动现象。通过稳态转向增益、增益调度的调节之后,得到最优期望前轮转角,这里不考虑转向系统的非线性,认为前轮转角与方向盘成比例关系,前轮转角乘以转向传动比就得到方向盘转角。饱和特性是指前轮转角设定在一定范围内,根据车辆不同设定范围不同,本文设定为-0.785~0.785弧度。这里要注意的是在乘以传动比系数时首先要将弧度转换为度。
2.3 横向约束
车辆在行驶道路上存在曲率变化较大,如果不考虑横向约束执行机构转动速率的限制,可能造成车辆转角突然变大,导致车辆失稳,甚至侧翻。为了保证车辆的横向稳定性需要对横向加以约束。

式中:a——车辆横向加速度;v——车辆速度;r——转弯半径,r与道路曲率ρ成倒数。
本文不考虑车辆纵向控制,设定车辆在一定速度下,车道曲率由车辆传感器给出,所以由式 (7)可知当道路曲率变大时,车辆加速度会变小。由动力学关系求得:

式中:w——车辆转角;L——车辆轴距。
由式 (7)和 (8)可知车辆的转角可以随道路曲率变化,将w作为车辆在道路曲率ρ,速度v给定条件下的最大转角作为横向约束。
3 车道保持系统仿真与测试
通过仿真验证横向偏差控制算法的有效性,同时调节PD参数,形成经验积累,作为实车测试调试的指导依据。
3.1 Simulink与TruckSim联合仿真
基于TruckSim搭建我厂重型车辆整车模型如图5所示,结合Simulink控制策略进行联合仿真,验证视觉感知车道线控制车辆实施车道保持。本文所使用TruckSim版本并没有视觉传感器,所以无法对车道进行感知,应用预先设置道路坐标的方法替代视觉传感器。搭建S型道路,实时输出车辆位置信息,再应用全局搜索找出和车辆位置最小的中心车道线坐标信息,将二者之差作为车辆和道路中心线的横向偏差。中心车道线是S型曲线。仿真时车速设定为固定值10m/s,利用预瞄点搜索算法[8],以车辆和轨迹最近点开始向前搜索一定数量的轨迹坐标和预瞄点进行比较,取最近的点和预瞄点之间的距离作为预瞄点横向偏差。将位置偏差置于图5所示位置偏差控制模型,计算方向盘转角,控制整车模沿着车道中心线行驶。模型仿真流程如图6所示。

图5 整车模型

图6 Simulink模型仿真流程
通过仿真,由图7可以看出重型车辆的运动轨迹和车道中心线基本重合,图8是车辆质心和车道中心线横向偏差,在直道时车辆的横向偏差基本控制在0.05m范围内,在弯道时偏差增大,最大值超过0.1m,综合情况满足了车道保持的要求。

图7 车道线和车辆运动轨迹对比

图8 横向偏差
3.2 实车测试
以我厂生产的越野车为平台,在我公司试验场对车道保持系统进行了测试。如图9蓝色线标记,该试验场是由东西两侧直道和南北两侧弯道组成的环形道路,全长4.6km。在测试之前,首先对视觉传感器作了标定,对控制参数进行了设置。控制周期设置为50ms。速度是由驾驶员控制,弯道时速度小于40km/h,直道时平均速度小于60km/h。预瞄距离设置为0.6v,位置偏差参数m为0.7,n为0.3。比例系数P为0.3,微分系数为0.05。并用CANoe对传感器信息和工控机经CAN卡发往底层的控制信息进行了检测,保证数据通畅。实车测试过程如图10所示。

图9 试验场地

图10 实车测试
在测试过程中发现车辆在弯道时容易出现抖动、滞后、偏差较大等问题,结合调试软件和仿真经验,得出车辆在不同速度下响应速度和滞后性不同。故将车道保持系统按速度分为5个等级,小于25km/h为低速,25~35km/h为中低速,35~45km/h为中速,45~55km/h为中高速,大于55km/h为高速。对不同速度下分别设置了和速度v成线性关系的P参数和不同的D参数。


这样比例增益P是关于速度v的线性关系,使得P随着v增大而逐渐减小,D逐渐增大。经过对PD参数的调节,截取弯道时车辆质心和车道中心线横向偏差如图11所示,车辆距离车道线中心的位置偏差基本稳定在0.2m范围内,偶尔出现抖动偏差。分析其原因在测试过程中发现由于路面不是绝对的平整,道路检测以及逆透视变换定位存在误差,造成偏差,会出现一定幅度的随机波动,进而造成转角的计算值出现波动,方向盘偶尔会出现小幅度的抖动。为解决这个问题,我们在最终发转向命令给车辆执行机构前,将转角计算结果应用限幅平均滤波法进行转角滤波。限幅平均滤波法的过程,首先将每次计算得到的值先进行限幅处理,再送入队列进行递推平均滤波处理。处理过程如下。
1)根据经验确定相邻两次转角差的最大值Maxdif。
2)得到的新的转角与上一次转角比较,若大于Maxdif,则本次值无效,用上一次的转角值作为新的转角;若小于Maxdif,则本次值有效。
3)用最新的转角值组成一个先进先出的队列,队列长度为5,将这5个数取均值,得到最终的输出转角。
经过滤波后,在同一路段采集车辆质心和车道中心下横向偏差如图12所示,与图11相比,虽然车辆整体抖动趋势相同,但偏差明显变小,没有较大的尖峰出现。

图11 实车横向偏差
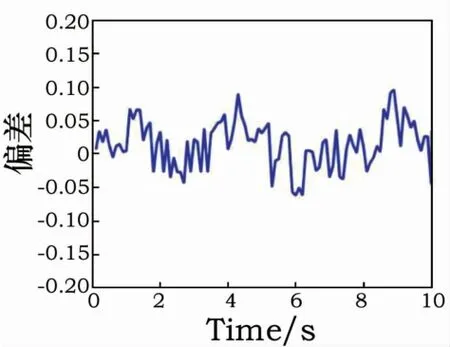
图12 滤波后实车横向偏差
4 结论
本文没有进行获取车道信息的研究。在视觉感知产品的基础上对控制算法进行研究与验证,将车辆相对车道的横向偏差和车辆前方一定距离的点和车道横向偏差作为位置偏差进行控制,不仅能修正车辆和车道的位置偏差,还能提前预测车道前方横向偏差。同时提出与速度成线性变换的PD控制参数,使得车辆在不同速度时控制参量不同,保证了控制的精准性。将该系统在我厂生产的重型军用卡车上进行测试,取得了很好的效果。本文只对车辆的横向控制进行了研究,对于与纵向控制结合还有待研究。同时由于测试环境的限制,该系统并没有进行高速试验,只是在小于60km/h的路面上进行了测试,提高速度也是日后需要研究的重点工作。
