基于前馈和反馈控制的车道保持辅助系统标定流程
2021-11-05陈有辉韦圆盛邓荣兴廖尉华林智桂
陈有辉 韦圆盛 邓荣兴 廖尉华 林智桂

中图分类号:U462 文献标识码:A
0引言
在关于交通事故的统计调查中,由于驾驶员的无意识车道偏离引发的交通事故占据了很大的比例。现代汽车已不仅仅是一个纯机械的产品,其能够借助传感器和控制芯片,实现一定程度的车辆自动控制,帮助驾驶员保持自身和道路周围参与者的安全。高级驾驶辅助系统中,车道保持辅助系统是车辆横向控制功能的主要组成部分,可以有效实现车辆在车道中心的平稳行驶。
由于每款车型的车身尺寸不同,转向系统的响应和传感器的感知信号不同,使用相同的横向控制逻辑时,需要对不同的车型进行匹配调试。针对基于反馈和前馈控制的车道保持辅助系统,规定一定流程的标定方法,有助于快速匹配调试车型,在短时间内验证车型的适配能力,充分发挥横向控制算法的车道辅助保持效果,保障驾驶员的车辆和人身安全。
1反馈因子标定
车道保持辅助系统的反馈模型,一般常见的是基于PID因子控制的误差控制模型,因此标定反馈系数需要标定模型的PID因子。其中,弯道的标定优先级大于直道,所以需要在标定弯道的PID因子之后再标定直道的PID因子。同时,标定弯道的PID因子时需要避免影响直道的性能,因此在后期,若又调节了弯道的PID因子,需要重新进行直道PID因子的标定。
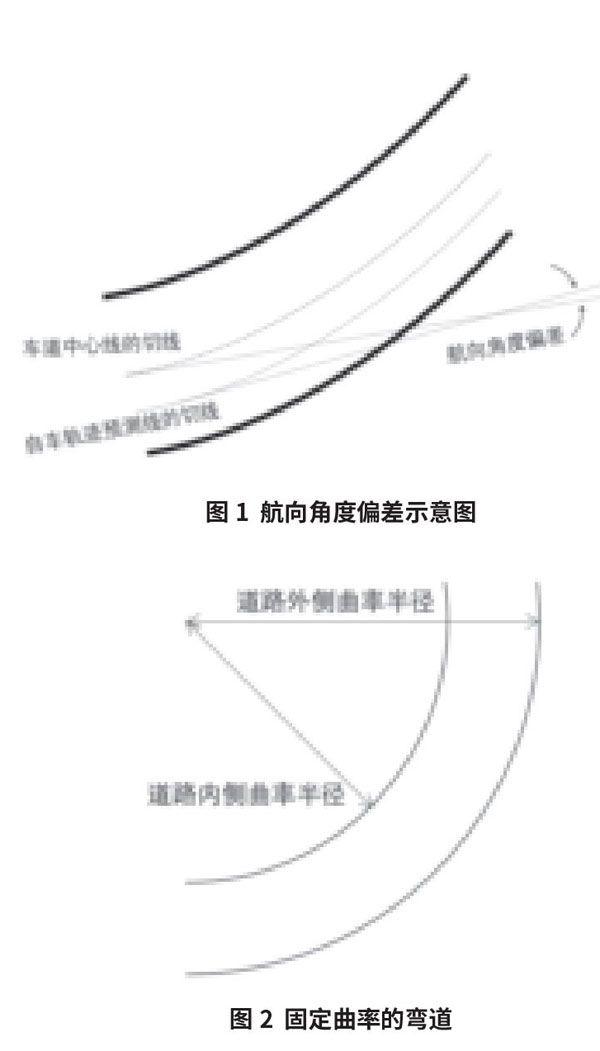
反馈控制系统的误差输入一般包括航向角度偏差和航向角度偏差变化速率(图1)。根据道路条件的不同,一般设置弯道和直道两套控制参数;再根据车辆所处车道的位置不同,一般设置路中和近车道线两套控制参数。
1.1弯道反馈因子的标定
弯道PID因子执行具体的标定操作时,需要一条车道线清晰、无侧倾角且曲率较小的弯道(图2)。驾驶车辆以70 km/h的速度感受过弯表现,根据车辆的反馈标定弯道路中航向角度偏差,弯道近车道线航向角度偏差,弯道路中航向角度偏差速率,以及弯道近车道线航向角度偏差速率的P和D因子。
弯道的标定需要根据车辆行驶在车道中的相对位置而确定两套标定流程。当车辆行驶在弯道路中靠近车道中心线时,反馈模型使用路中PID参数进行车辆的控制;而当车辆行驶在弯道的一侧(相对更靠近车道线时),反馈模型使用近车道线的PID参数进行车辆的控制。具体标定反馈模型中弯道PID因子的流程如下。
1.1.1弯道路中参数的标定
如图3所示,将车辆沿弯道的中心线行驶,主动打偏方向使车辆偏向于车道边缘(偏离0.3m以内),感受车辆回馈扭矩。同时,根据回馈扭矩的大小、方向盘抖动速率和车辆行驶的轨迹,来调节弯道路中航向角度偏差,以及弯道路中航向角度偏差速率的P和D因子。
1.1.2彎道近车道线参数的标定
将车辆沿车道中心线行驶,主动打偏方向使车辆偏向于车道边缘(偏离0.3m以上),感受车辆回馈扭矩。同时,根据回馈扭矩的大小、方向盘抖动速率和车辆行驶的轨迹,并参考对应的弯道路中参数,来调节弯道近车道线航向角度偏差,以及弯道近车道线航向角度偏差速率的P和D因子。
1.2直道反馈因子的标定
根据反馈模型的执行原理,PID因子一般在直道条件下发挥更大的作用,所以先标定弯道的PID因子,再标定直道的PID因子,以发挥直道条件下反馈参数的决定性作用。直道PID因子的标定过程需要一条车道线清晰且无侧倾角的直线道路,用于标定直道路中航向角度偏差,直道近车道线航向角度偏差,直道路中航向角度偏差速率,以及直道路中航向角度偏差速率的P和D因子。
与弯道的标定操作类似,直道的标定也需要根据车辆行驶在车道中的相对位置而确定两套标定流程。当车辆行驶在笔直道路中靠近车道中心线时,反馈模型使用路中PID参数进行车辆的控制;当车辆行驶在直道的一侧(相对更靠近车道线时),反馈模型使用近车道线的PID参数进行车辆的控制。具体标定反馈模型中直道PID因子的流程如下。
1. 2.1直道路中参数的标定
将车辆沿直道的中心线行驶,主动打偏方向使车辆偏向于车道边缘(偏离0.3m以内),感受车辆回馈扭矩。同时,根据回馈扭矩的大小、方向盘抖动速率和车辆行驶的轨迹,并参考对应的弯道路中参数,来调节直道路中航向角度偏差,以及直道路中航向角度偏差速率的P和D因子。
1.2.2直道近车道线参数的标定
将车辆沿直道的中心线行驶,主动打偏方向使车辆偏向于车道边缘(偏离0.3m以上),感受车辆回馈扭矩。同时,根据回馈扭矩的大小、方向盘抖动速率和车辆行驶的轨迹,并参考对应的直道路中参数,来调节直道近车道线航向角度偏差,以及直道近车道线航向角度偏差速率的P和D因子。
2前馈因子标定
需要事先标定好反馈模型中弯道和直道的PID因子,之后才可以标定前馈模型中的参数因子。由于前馈控制通常只在弯道条件下发挥作用,直道环境中无法执行前馈因子的标定,因此需要选取车道线清晰且满足曲率梯度要求的固定曲率弯曲道路若干,作为前馈控制模型参数标定的准备条件。
前馈控制模型的参数标定之前,首先关闭反馈模型的控制输出(在反馈模型中将PID系数置为0),然后以70km/h的速度驾驶车辆过弯,感受控制中只有前馈时的过弯表现。将车辆在某一条固定曲率的弯道中沿车道中心线平稳行驶,然后脱手观察车辆的过弯情况。如果车辆转向于弯道内侧,说明前馈扭矩过大,则调小此弯道曲率段对应的前馈因子;如果车辆转向于弯道外侧,说明前馈扭矩不足,则调大此弯道曲率段对应的前馈因子。之后更换另一条固定曲率的弯道,依次标定完成各曲率段对应的前馈因子。最后,更改车辆的行驶速度,标定各速度段的前馈因子。
3结束语
对于由反馈和前馈控制的车道保持辅助系统,都可以借鉴本文中的标定流程进行匹配调试。在具体的标定过程中,需要根据测试场地的道路限制,选取合适的固定曲率的弯道。在连续弯道或者曲率变化的场地中,则需要结合前馈和反馈控制的影响因素,进行细致的调节。
作者简介:
陈有辉,硕士,工程师,研究方向为辅助驾驶功能、车道保持系统开发。
