直流输电控制保护系统的电压控制与自动化运维模型
2021-11-04邱志远冯文昕鄢天毕
邱志远,冯文昕,刘 浩,鄢天毕
(1.超高压输电公司贵阳局,贵阳 550081;2.贵阳锐泰电力科技有限公司,贵阳 550002)
0 引言
直流输电控制保护系统的设计目的是避免电力在换流站、直流线路、电力滤波器以及变压器等多个输电环节中可能出现的异常和故障现象,准确的分析直流输电的动态行为和特性,进而针对各个影响因素制定具体的控制保护方案。从直流输电控制保护系统现阶段的应用情况来看,存在明显的电压波动不稳定、系统运行与维护效果差的问题,为此构建了系统的电压控制与自动化运维模型。现阶段应用频度较高的电压控制与自动化运维模型包括基于分布式协同的配电网电压控制和基于电源负载调节的电压控制等模型。其中基于分布式协同的配电网电压控制主要利用的是电网中的分布式结构,通过各个电网节点之间的协同配合,实现整个电网系统的电压控制。而基于取能电源负载调节的电压控制方法则是通过对发电厂端电能的负载情况进行分析,结合负载量的变化规律进行调节,以实现对直流输电及其控制保护系统电压的控制。然而在实际的应用过程中发现,上述现有的电压控制模型的控制精度不足,无法将电压控制在规定范围内,且在自动化运维管理方面的无明显效果,无法为直流输电控制保护系统的稳定、安全运行提供保障。为了解决上述问题,在现有模型的基础上进行优化设计,以期能够在提高系统电压控制力度的同时,提升系统的自动化运维能力。
1 输电控制保护系统的电压控制与自动化运维模型设计
从直流输电控制保护系统的电压控制和自动化运维两个方面,实现对模型的优化设计。其中电压控制主要结合了直流输电以及控制保护系统的工作规律,分别从电压偏差、电压稳定以及电压裕度等多个方面实现电压的有效控制,保证在不同的直流输电状态下电压的稳定运行与转换。而自动化运维主要指的是运行与维护,也就是在直流输电控制保护系统的运行过程中,自动配置保护参数、驱动控制程序运行,并对系统中的硬件设备、通信网路以及软件运行程序进行实时监测,确保系统的运行安全。
1.1 直流输电控制保护系统组成与工作特性
直流输电控制保护系统的设计基于一种分层、分散、分布式的开放式系统。为了提高系统的安全性和保护的可靠性,两端换流站的控制保护系统采用完全双重化设计[1]。直流输电控制系统的组成结构如图1所示。
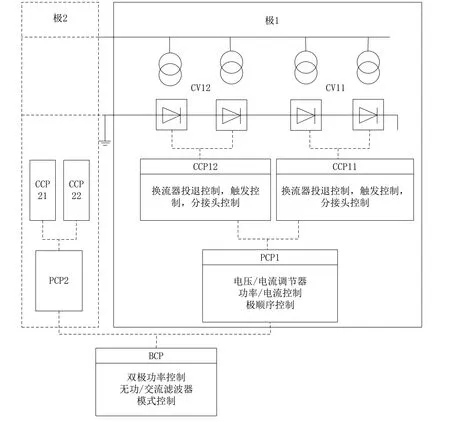
图1 直流输电控制保护系统结构图
图1中CV11和CV12表示的是高压和低压的换流器组,CCP11和CCP12为两个换流器控制层,BCP为双极控制层,实现极1 PCP和2 PCP的控制。根据直流输电控制系统的组成结构,它可以分为数据采集层、控制保护层和输入输出层三个层次,而控制保护层主要由直流系统控制层、极控制保护层、阀组控制层等单元组成[2]。在该系统中,直流系统控制层主要用于接收调度中心的调度指令,并将生成的控制参考值发送给控制层。极性控制保护层包括极性控制单元和保护单元两部分,控制单元可实现将测量信号接入到上一级参考指令,在系统控制器的作用下跟踪控制参考指令,输出期望的正弦参考基波电压并向阀组控制层发送电压,实现直流电压限幅以及变化速率等运行性能。保护单元可以在故障情况下,保护单元采用完全双重化的冗余配置,缩小故障范围,减少对设备和非故障区域的影响。阀组控制层是连接上层极控制层和底层开关装置的中间枢纽。能接收极控制层输出的控制信号,产生相应的触发脉冲,实现换流器模块的触发控制。通过系统中各个控制层之间的信号传递以及协同工作,完成对直流输电多个环节的控制。
1.2 构建直流输电控制保护系统等效电路
直流输电控制保护系统主控功能的等效电路如图2所示。

图2 直流输电控制保护系统等效电路图
图中usk、isk、Udc和idc分别表示交流侧和直流侧的相电压和电流值,ikp和ikn表示的是通过每项上、下桥臂的电流,角标p和n为上、下桥臂,另外L0和R0为桥臂电感和等效电阻。由此可以得出k相上、下桥臂的电流表达式为:

式中变量ikdiff为同时流过k相上、下桥臂的环流。由此可以得出直流输电控制保护系统等效电路表达式为:

其中ek表示的是k相内电势,取值为。从式(2)中可以看出,可以通过对内电势ek的控制失效对交流侧电压的控制,同时也可以通过控制桥臂换流实现对系统直流电压的控制。
1.3 设计并安装电压控制器
针对不同的电压控制任务设计多阶直流电压混合控制器。其中电压偏差控制器设计结构如图3所示。

图3 直流电压偏差控制器
图3中UDCRL和UDCRH分别为直流电压低阶和高阶PI控制器,APR为有功功率PI调节器。图3中的变量Udc_refLn和Udc_refHn分别为偏差的直流电压控制设置的高限值和低限值,Udcn和Pn为输入的直流输电控制保护系统的实时运行电压和功率值,Prefn、Pmaxx和Pminx分别为有功功率指令以及有功功率运行的上下限值[3]。通过控制器的运行,最终输出的结果Ud_refn即为直流电压的控制结果。同理可以得到其他类型的电压控制器,并按照控制运行进程连接四阶控制器,最终将控制器输出的信号作用在直流输电控制保护系统等效电路的桥臂上,完成控制器的安装。
1.4 控制输电控制保护系统运行电压
以设计并安装的电压控制器为运行环境,将直流输电控制保护系统的实时电压数据作为输入项输入到控制器中,通过对电压控制量的计算,分别从偏差、均衡稳定、电压切换等多个方面,实现对系统运行电压的控制。
1.4.1 直流电压偏差控制
直流电压偏移控制的目的是消除控制模式下对多端系统通信的依赖。直流电压偏差控制器的运行逻辑为:

通过偏差控制器的运行判断当前的直流电压是否超过其设定的高低限值,若直流电压高于上限值,偏差控制器自动转入直流电压控制模式运行,并控制在UdcrefH处稳定。若低于下限值,则向下偏移,控制直流电压稳定在UdcrefH处,以确保多端系统的直流电压稳定。
1.4.2 电压均衡控制
直流输电控制保护系统的电压均衡控制是保证直流输电环境中换流器稳定运行的关键,电压均衡控制可以分为电压测量和电压排序两个步骤。以a相单元直流输电控制保护系统为例,每个子模块用电设备安装一个电压传感器,通过电压传感器实时采集各模块的系统电压信息,并通过一定的调理电路送至处理器,对系统电压进行排序[4]。直流输电系统处于充电状态时,需要根据系统电压的升序排列,选取电压最低的模块投入运行。当桥臂电流对直流输电系统进行放电时,系统电压会被降序排列。以上系统电压的排序采用式(4)表示。

式(4)中变量Udc和nt分别表示系统电压和投入个数,而T-sort(·)为排序函数。采用此排序方法,调整子模块的充电和放电模式,逐渐与其他子模块的电压值追平,并且不停地重复此步骤,实现电压均衡控制。
1.4.3 直流电压无缝切换控制
直流输电保护控制系统的执行程序随着直流输电状态的变化而变化,需要对直流电压进行不同的控制状态进行调节。此外,系统中各用电设备的额定电压不同,因此需要在电流流通过程中结合不同的用电设备实现电压的切换和调节。对系统运行状态及各用电设备的功率电压运行数据进行了提取,分析了直流电压和功率运行特性。DC电压无缝切换的控制原理是将不同状态下运行特性的合理组合,当系统运行到特性运行点时,得到新的运行指令值,实现电压的跳跃和切换。
1.5 实现直流输电控制保护系统自动运维
直流输电控制保护系统的运维分为运行和维护两个部分,其中运行就是配置系统的运行参数和驱动程序,保证系统可以在目标环境中正常运行。而维护主要指的是监测系统运行是否安全、自动修改故障程序等。在此次模型研究中,以直流输电系统的运行状态作为模型的输入项,也就是直流输电控制保护系统自动运维程序的启动项,通过时序同步、维护参数配置等多个步骤,实现模型中的系统自动运维功能。
1.5.1 直流输电控制保护参数配置
控制系统的保护内容分为:阀组保护、直流线路保护、旁路开关保护等。以阀组保护为例,给出了直流输电控制保护系统输出阀组过电流保护动作方程如下:

上式中的两个方程分别对应的是高压阀组和低压阀组的保护动作,得出的结果IDH和IDL表示的是高、低压阀组短路电流,IVY、IVD和IDCN代表三种不同类型的输电换流器侧阀塔阀侧电流,角标H和L分别表示高压阀塔和低压阀塔[5]。另外Iseth和Isetl为控制保护系统中设置的高、低压阀组动作定值。同理可以在控制保护系统中设置其他运行部件的动作保护定值,根据直流输电系统的运行状态自动调整保护参数,实现直流输电控制保护参数的动态配置。
1.5.2 系统故障维护
系统故障维护可以具体分为故障检测、故障处理、故障定位以及报警响应四个模块。故障检测的内容包括直流输电控制保护系统中硬件设备、通信网络以及软件功能程序的运行故障。当检测到系统中存在异常故障时,立即启动事件跟踪程序,判断系统的故障类型,若故障类型为网络通信、软件程序或参数设置故障,系统可以根据历史数据自动调整当前运行数据,实现故障的自动修复,且在完成故障处理后,终止事件跟踪程序。如果检测到的故障类型为硬件设备故障,无法通过系统程序的调整实现故障的维修,此时需要同时启动故障定位和报警响应程序,并在硬件设备修复完成后,停止事件跟踪程序。
2 模型测试实验分析
在模型设计完成后,需要进行大量的测试工作,保证设计模型在实际工作环境中的应用效果。此次模型测试实验分别从电压控制效果和自动化运维效果两个方面进行分析。在开始实验之前,首先选择直流输电工程并在输电环境中实现直流输电控制保护系统的配置,其中关键设备如换流器、直流线路等,通过等值阻抗的作用保证参数与运行实际一致。
选择系统中的换流器设备作为模型电压控制效果的研究对象,在设计模型未启动状态下,利用传感器设备现场采集电压数据,如图4所示。
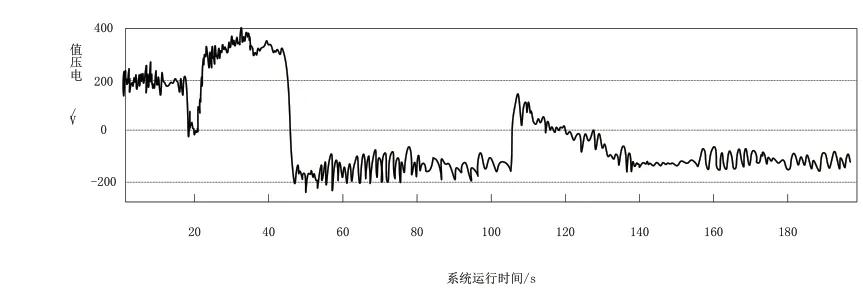
图4 直流输电控制保护系统电压现场采集录波
根据实验目的,分别从电力控制和自动化运维两个方面设置模型测试指标。其中设置的电力控制效果量化指标为电压控制误差,具体的数值结果为:

式中Ui和U'i分别表示应用设计模型后实际采集的电压值和设置的控制目标值,n为采集的电压值数量。式(7)得出的计算结果越大,证明模型的控制精度越低。除此之外,设置t和χt作为系统自动化运维效果的量化指标,其中t表示的是直流输电控制保护系统控制保护命令的响应时间,可以通过记录控制命令生成和完成的时间,并计算两者的差值得出具体的测试结果。t的值越大证明系统的响应时间越慢,即模型的自动化运维功能效果越差。而指标χt的数值结果可以表示为:

式中Tfault和Ttotal分别表示的是系统一次故障的持续时间和运行总时间,m为系统运行过程中发生故障的次数。通过式(7)的计算得出χt的值越大证明系统在运行过程中的故障占比越大,即模型的自动化运维功能效果越差。
通过设计模型的应用,得出直流输电控制保护系统电压偏差、电压均衡、无缝切换的控制结果,如图5所示。
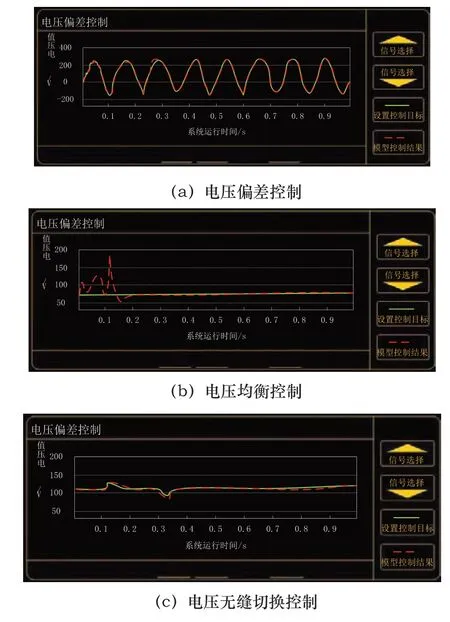
图5 直流输电控制保护系统的电压控制结果
从图5(a)中可以看出,经过设计模型的应用,系统的实际电压与设定电压曲线基本吻合,图5(b)表示的是电压均衡控制结果,从图中可以看出在0.10s时刻开始执行均衡控制程序,并在0.20s前将系统电压控制在稳定状态,且在后期未发现明显的电压波动。在电压的无缝切换控制中,共执行了2次电压切换,且均能在0.2s内完成电压的稳定切换。将图5中的数据代入到式(6)中,得出三种电压控制程序的控制误差ηaccuracy均低于1.0V,由此证明设计模型的电压控制效果满足应用要求。
为了保证实验结果的可信度,自动化运维测试实验共执行5次,每次实验规定直流输电控制保护系统的运行时间为72小时,分别统计系统控制保护命令的响应时间、故障次数以及故障时间和,得出模型自动化运维效果的测试结果,如表1所示。
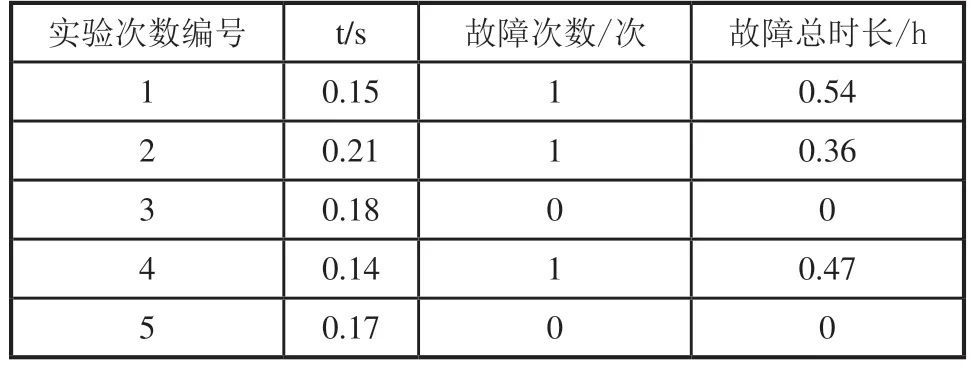
表1 模型自动化运维测试结果
从表1中可以看出直流输电控制保护系统控制保护命令的平均响应时间为0.17s,低于0.2s,即应用设计模型能够满足直流输电控制保护系统的命令响应速度要求。将表1中的故障次数与故障总时长数据代入到式(7)中,得出指标χt的具体取值,经过多组数据的计算得出χt的平均值为0.38%,低于5%。综上所述,设计的电压控制与自动化运维模型在直流输电控制保护系统中具有较好的应用效果。
3 结语
直流输电控制保护系统是直流输电工程的辅助工具,其运行性能直接影响直流输电工程的建设质量。通过系统的电压控制与自动化运维模型的设计与应用,有效的解决了系统运行不稳定的问题,间接的提升了直流输电工程质量,因此具有较高的现实意义。
