带弯道信息的城市复合行驶工况构建方法研究*
2021-11-04荣浚材王军年吕斯文刘俐丽
孙 文,荣浚材,王军年,徐 佳,吕斯文,刘俐丽
(1.常州工学院汽车工程学院,常州213001;2.吉林大学,汽车仿真与控制国家重点实验室,长春130022)
前言
城市的交通状况与车辆的油耗和尾气排放密切相关,随着机动车保有量的不断增加,对交通排放的治理也受到越来越多的关注[1]。车辆的行驶工况可以作为反映城市交通状况的主要特征,汽车能耗评价目前应用的就是基于特定行驶工况或综合工况的能耗评价。同时,随着新能源汽车市场保有量日益增大的趋势,车辆行驶工况还能够预测质子交换膜燃料电池汽车在不同行驶条件下的使用寿命[2]。当前,世界上大部分国家都普遍认可的车辆行驶工况为:美国城市循环工况(FTP-75)、日本循环工况(Japan10.15)和欧洲行驶工况(NEDC)。欧洲在多年的实践中发现了NEDC工况的诸多不足,转而开发并应用了全球统一轻型汽车测试工况(WLTC)[3]。我国也在2019年正式发布符合中国实际交通环境的中国轻型车测试循环(CLTC),弥补了长期缺少自己的循环工况的空白[4]。
在行驶工况研究方面,近年来我国许多科研机构和学者己经研究出了适合不同道路交通情况和车型的汽车行驶工况。高建平等通过选取戴维森-堡丁指数,基于全局K⁃means聚类算法构建了郑州市乘用车行驶工况[6];王昊等通过主成分分析和聚类分析构建了基于大量数据并符合上海市实际道路行驶特征的行驶工况[7];余曼等构建了基于FCM聚类算法的电动汽车城市循环工况[8];徐小俊等使用K-均值聚类法和马尔可夫链理论构建了电动汽车与传统汽车城市行驶工况[9];张玉西等采用小波分层阈值降噪和小波分解域量化压缩的方法对原始数据进行预处理,结合改进主成分分析法合成了汽车行驶工况[10];Liu等通过整合聚类和马尔可夫链算法,建立了并联插电式混合动力电动汽车的3种不同的驱动配置并构建了天津市典型驾驶循环工况[11];Peng等在使用全球定位和惯性导航功能的测量系统来获取驾驶数据的前提下,根据马尔可夫链理论,基于传递矩阵和蒙特卡洛方法开发出了郑州城市混合动力公交车的车辆循环工况[12];Tong等收集具有混合特征的公交车网络上的行驶数据,构建了符合香港巴士独特的低速运输和激进驾驶特性的公交车行驶工况[13]。
在行驶工况应用方面,丁峰等通过构建平稳工况和快变工况,提出了基于预测控制的能量管理策略,提升了车速预测方法的精确度,降低了等效能耗比[14];田慧欣等基于循环支持向量回归(SVR)模型通过地图信息预测未来的行驶工况,提高了纯电动汽车续驶里程预测精度[15];詹森等针对多循环工况优化汽车动力系统参数,使其适用于多种工况,并进一步提高了整车燃油经济性[16]。由此可见,车辆行驶工况对评价整车能耗、提高续驶里程预测精度等研究领域有着关键性作用,构建更加全面而准确的车辆行驶工况显得尤为重要。
但是,现有的车辆行驶工况的构建方法由于缺少实际的道路转弯工况信息,导致能耗评价并不准确。电动轮驱动系统的结构设计也因缺乏弯道工况信息,导致其不能满足在复杂工况下的强度和挠度要求,其合理性和完善性也有待提高[17];另外,分布式电动汽车能够利用力矩的灵活分配减少转弯能耗的潜力也因缺少相应标准测试工况,导致评价缺少统一标准[18-21]。而在实际行驶中,车辆转弯的情况非常普遍。因此在讨论和研究车辆转弯时的节能和操纵稳定性问题时,单一的速度-时间曲线并不能满足仿真实验的要求。因此,迫切需要构建一种具有弯道工况特征的城市综合工况,以克服各类涉及弯道工况方面研究的困难。
本文中针对汽车弯道仿真过程中的实际应用困难,依托实验数据对采样工况进行分析,采用优化后的数据处理方法,基于主成分分析法和聚类分析法成功获取到9个代表性弯道短工况,并增维到城市综合工况当中,创造性地构建出弯道工况的时间-车速-轨迹三维曲面,进而获得更符合实际道路特征的带有城市弯道信息的复合行驶工况。本文的研究内容能够有效弥补仿真实验中弯道工况构建的缺失,为车辆测试和验证阶段,尤其在转弯工况的操纵稳定性、燃油消耗量和尾气排放量等研究领域提供数据支持,也为研究四轮独立驱动电动汽车的节能效果提供技术支持,为整车设计和汽车电机的动力匹配提供参考。
1 弯道工况片段分割
1.1 弯道工况分割特性分析
弯道工况区别于直线工况具有其特殊性。首先,车辆进入弯道时的速度变化通常是先减速再增速。其次,转弯时的平均速度很大程度上受弯道半径的影响,比如半径为20 m的弯道路段上车辆的平均行驶速度普遍小于半径为40 m的弯道路段。除了行驶特征与直线工况不同之外,弯道工况试验需采集的数据和特征参数种类也更多,如下文1.3节所述。
经分析,本文中提出的常规弯道工况分割方法有3种。(1)根据曲率特征进行分割:车辆行驶到弯道工况时,位移曲线的曲率将随着时间的增加由0增加到某一正整数,持续一段时间后再减小到0;缺点是变道工况的曲率特征与其相似,在实际分割时容易分割出变道工况,混淆结果。(2)根据速度特征进行分割:将进入弯道前的车速明显下降和出弯后车速明显上升的片段分割为转弯片段;缺点是易受驾驶人的偶然操作和实际交通情况影响,不是弯道工况也会出现相类似的速度特征。(3)根据曲线形状特征进行分割:车辆行驶到弯道工况时,其曲线形状特征为转弯前后的行驶路线的延长线相交;缺点是人工操作,劳动量比较大,且易受个人主观意识影响,产生人为参与的实验数据。
相比于直线工况,弯道工况实验需要采集的数据更多。而且在聚类分析中,初始聚类中心的选取对聚类结果有很大影响,因此如果最后分割的数据对象中存在不符合弯道工况的数据(比如直线行驶、变道行驶、红绿灯的停止和起动等),则可能会导致聚类结果陷入局部最优,对实验分析产生不利影响[22]。同时在弯道工况中,数据的采集并不像直线行驶工况这么简易,直线行驶中的任意一段工况数据都可以采集,而且以速度和时间为主要参数,但弯道工况涉及到包括转弯半径、曲率等特征参数,并要从整个行驶工况中分离出弯道工况部分,所以获得完整的弯道工况数据是非常有难度的。因此在聚类分析之前,对所采集的数据进行适当处理、获得准确的弯道工况数据显得尤为重要。
从以上论述可以看出,针对弯道工况的特殊性,采用任何一种单一的方法都不能准确地获取弯道工况数据。因此本文中采取如图1所示的流程,以获得更加准确的工况数据,从而使后续所选取的初始聚类中心更具科学性与代表性。即先通过短行程分析法划分出一系列短行程,然后结合曲率特征分割法和速度特征分割法获得交集数据,再用曲线形状特征分割法去验证该交集数据,进而获得最终的更为准确的弯道工况数据。
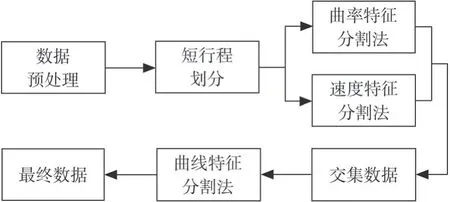
图1 数据分析流程
其中,上述3种弯道分割方法中最为关键的是根据曲率特征进行分割,经大量实车数据的分析、归纳和验证,以曲率值0.06作为弯道判断标准最符合车辆实际转弯行驶特性。曲率特征分割法的主要步骤如图2所示。
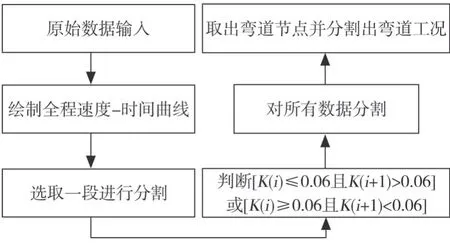
图2 曲率特征分割法
1.2 实验路线
选用的实验路线应该能够符合实验当地的主要交通状况。为了获得科学严谨的实验结果,必须选择一个合适的实验方法。本文中根据交通流量理论(v=KQ,其中v为车速,Q为车辆流量,K为车辆间距),通过交通流量的大小与比例来选择较为典型的实验路线,使其可以较为全面地反映当地的交通情况[23],本文中选取了以图3为例的共计15条实验路线。

图3 实验路线
1.3 参数选择
一般来说,在进行弯道工况研究时,如果仅仅用车速和加速度两个量作为特征参数进行弯道工况的构建,那么得到的弯道工况并不能充分反映本地的实际弯道行驶特征。所以,需要选择一些其他特征参数对车辆实际工况进行贴近真实状况的描述,而且因为本文研究的是汽车在弯道行驶时的运动状态,所以必须要选择与弯道相关的参数,如:最大半径、最小半径、半径方差等。因此,本文中选择了22个统计学参数来描述和评价运动学片段的特征,有行驶距离S,最高车速vmax,最低车速vmin,平均车速vm,速度标准差vsd,最大加速度amax,最小加速度amin,加速段平均加速度am,减速段平均加速度ad,运行时间t,加速时间ta,减速时间td,加速时间比tna,减速时间比tnd,最大半径Rmax,最小半径Rmin,平均半径Rm,半径标准差Rsd,最大曲率Kmax,最小曲率Kmin,平均曲率Km,曲率标准差Ksd。
其中,弯道工况区别于直线工况最明显的特征参数是半径R和曲率K,以特征参数R和K为例,其主要计算过程如下。
取3点坐标(x1,y1),(x2,y2),(x3,y3),设圆心坐标(x0,y0)和半径R。

将式(3)写成矩阵形式

式(4)可以对应写成A•B=C,则根据A=C/B可以得到矩阵A,由此可以得到圆心坐标及半径:
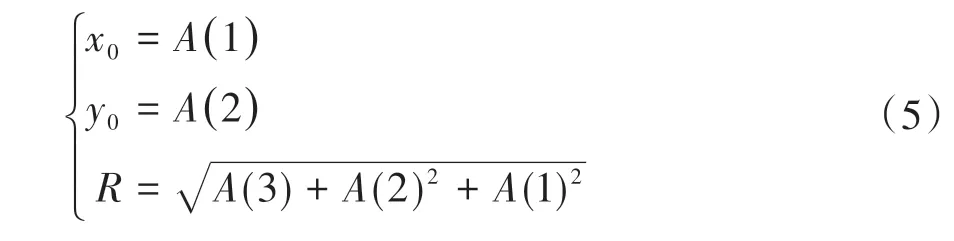
也可得到曲率K=1/R,通过计算该弯道片段的n组数据即可获得相应曲率和半径的特征参数值。
1.4 采集装置
数据采集车载终端与车辆的OBD接口相连接,如图4所示。在汽车行驶过程中,以1 Hz的频率采集包括车速、发动机转速、转矩百分比、瞬时油耗、进气歧管温度、发动机负荷、进气歧管压力等参数。通过信息化数据平台对车辆进行实时监测,确保数据采集的连续性[24]。
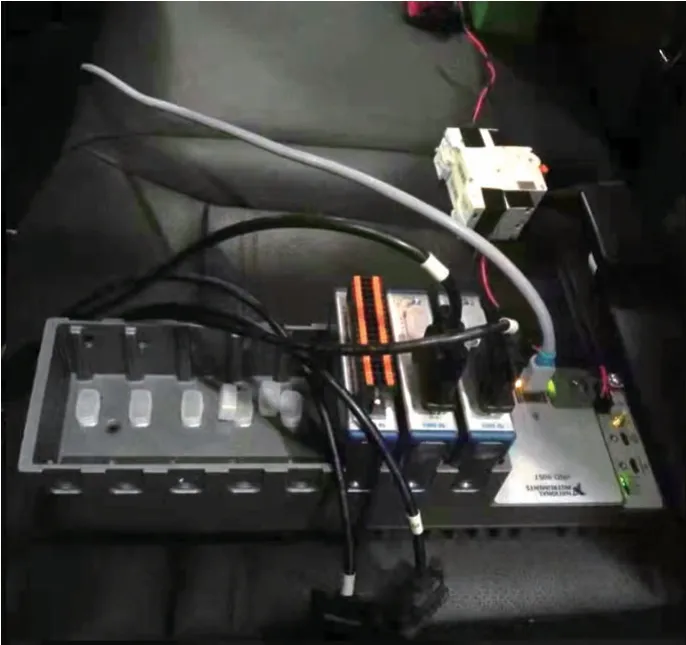
图4 数据采集车载终端及安装效果
2 弯道工况构建
本文中采用如图5所示的流程进行弯道工况的合成。本节将针对特征参数的计算、主成分分析和数据降维,以及聚类分析部分的内容进行具体说明。

图5 弯道工况构建流程
2.1 特征参数计算
本次实验用优化后的数据获取方法成功地从收集到的实验数据中分割出了64组弯道工况数据。通过编程计算特征参数,首先将分割出的弯道片段输入编程软件,其次将所有数据按时间轴归一化,并将速度时间3阶拟合,然后根据特征参数的计算方法计算所有的特征参数,计算结果如表1所示。

表1 各弯道工况特征参数
2.2 主成分分析和数据降维
一组数据的许多变量之间的关联性会大大增加对所需问题进行分析的复杂性。假如对每项指标都进行单独分析,分析的结果也将是独立的,这将无法充分利用原始数据中的全部信息。但如果盲目地进行降低变量个数,这可能会导致原始数据中的大量有用数据丢失[25-26]。
主成分分析可以达到用比较少的综合指标去表示原始数据的各种指标所包含的大部分信息的效果。这种方法可以说是仅仅保留包含大部分方差的维度特征,而放弃含有几乎为零方差的特征维度,最后使数据特征的降维得以实现。
对弯道特征参数数据进行主成分分析,从而获得各个主成分的特征值、贡献率和累计贡献率,特征值可以用来反映各个主成分的方差贡献,通过计算得到各主成分特征值、贡献率、累计贡献率,如表2所示。由表可知,前6个主成分的特征值全部大于1,累计贡献率己经达到86.5%,故前6个主成分己经可以表示原数据的所有信息[27]。主成分贡献直方图如图6所示。
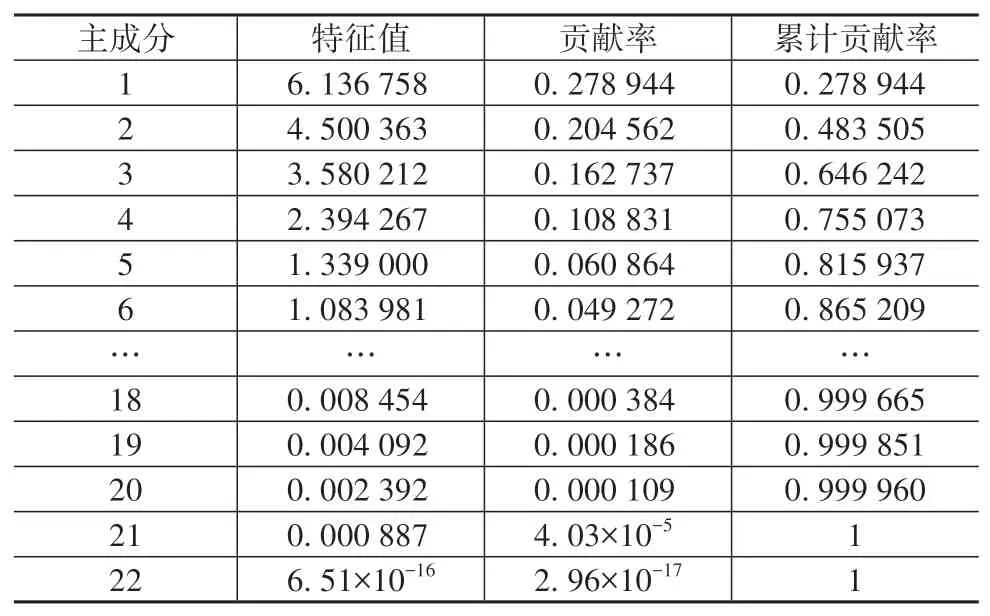
表2 各主成分特征值、贡献率和累计贡献率
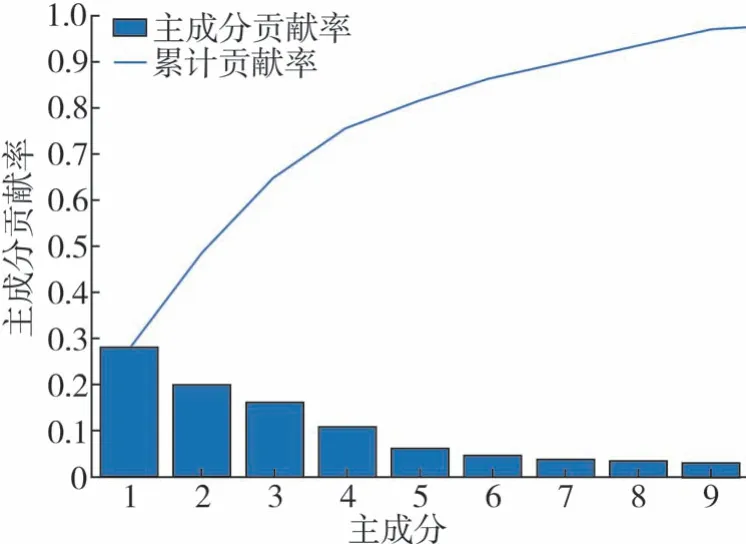
图6 主成分贡献直方图
2.3 聚类分析
聚类分析能够将样本数据依据其内在的联系,将相似的数据划分为一类[28-29],本次实验将前6个主成分进行K⁃means聚类。由于本次实验的原始数据已经过特殊处理,所以直接用K⁃means聚类通过1 000次迭代将所有数据分成了3类,每个类别的聚类中心如表3所示,每个数据距每个质心的距离如表4所示。根据距离质心的远近将所有数据分为3类,也就是将所有工况分为3类,如表5所示,第1类有23个,第2类有23个,第3类有18个。各个工况距质心的远近体现了该工况与该类别的相关程度[30]。
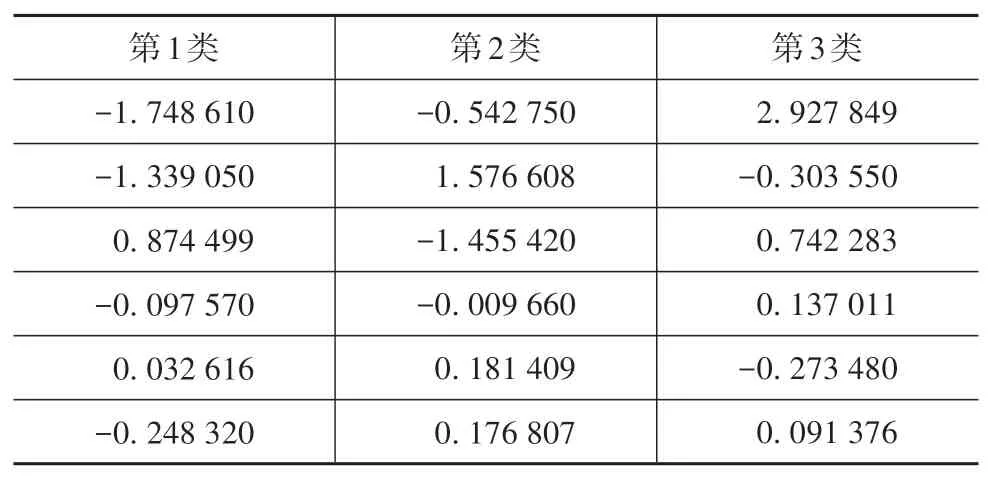
表3 聚类中心
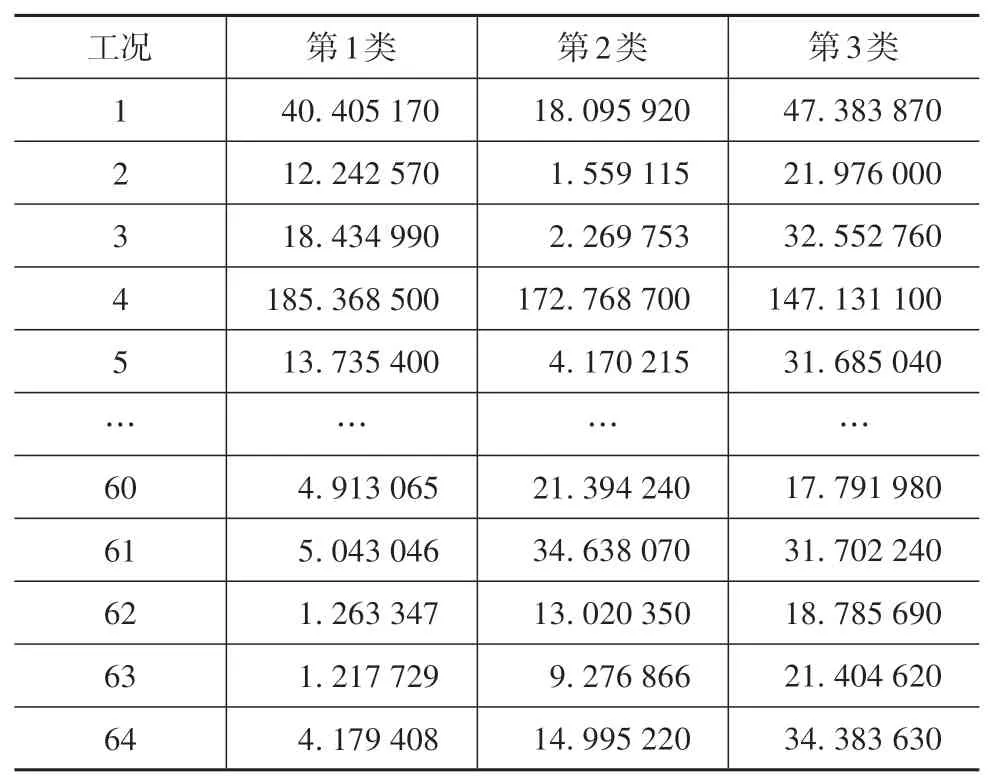
表4 距质心距离
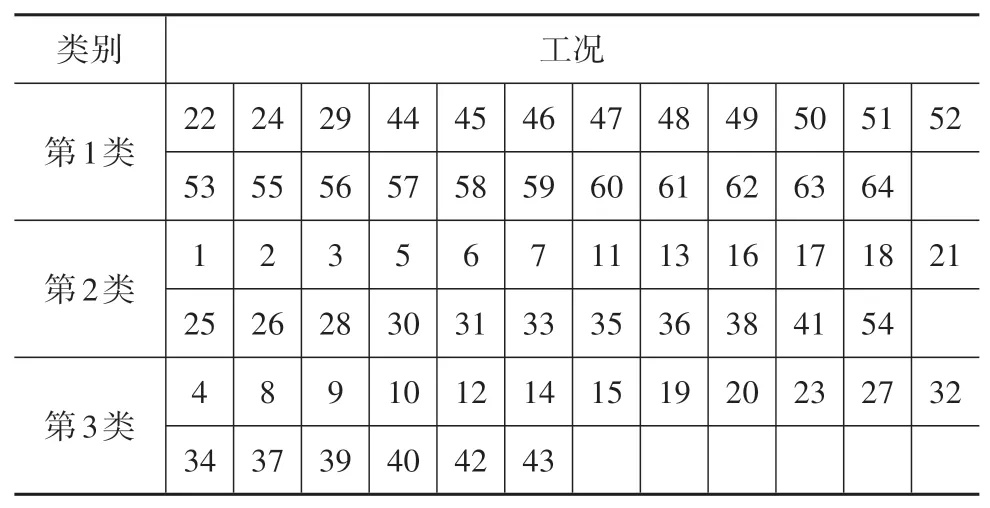
表5 分类结果
3 复合行驶工况构建
城市综合行驶工况能够反映道路交通实际的运行状况,可以评价车辆发动机油耗与排放水平,为新车型的开发和制定交通控制策略提供参考,并在模拟仿真中提供数据支持[31-33],城市综合行驶工况如图7所示。
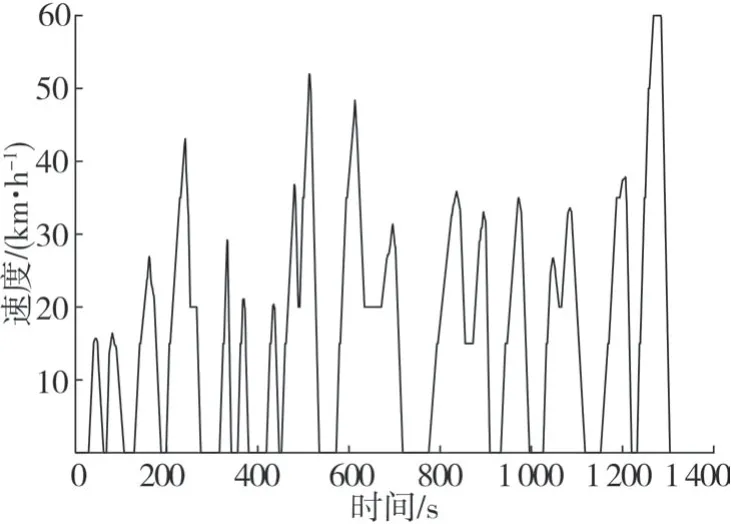
图7 城市综合工况
3.1 弯道代表性工况提取
根据上述聚类结果与各类别相关程度最高(距聚类中心远近)及各类别工况数量之间的比例提取9个工况作为转弯代表性工况,并组成转弯代表性片段特征参数数据库1和转弯代表性片段数据库1-1,如表6和表7所示。根据各个代表性工况的速度、时间特性,从城市综合工况中分割出待替换的工况组成数据库2。
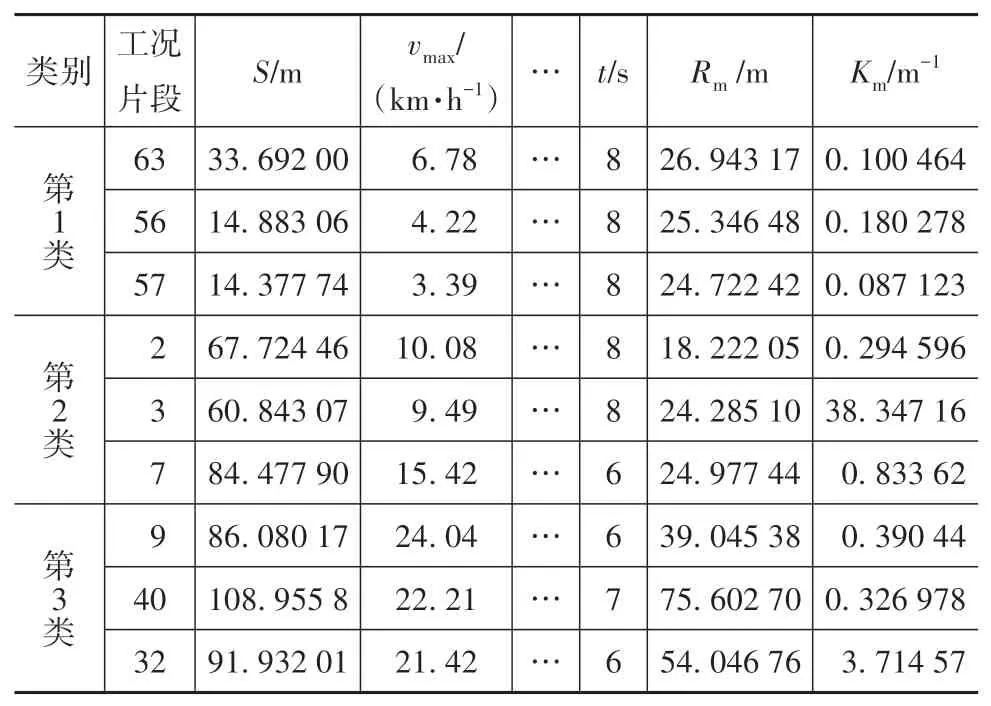
表6 转弯代表性片段的特征参数
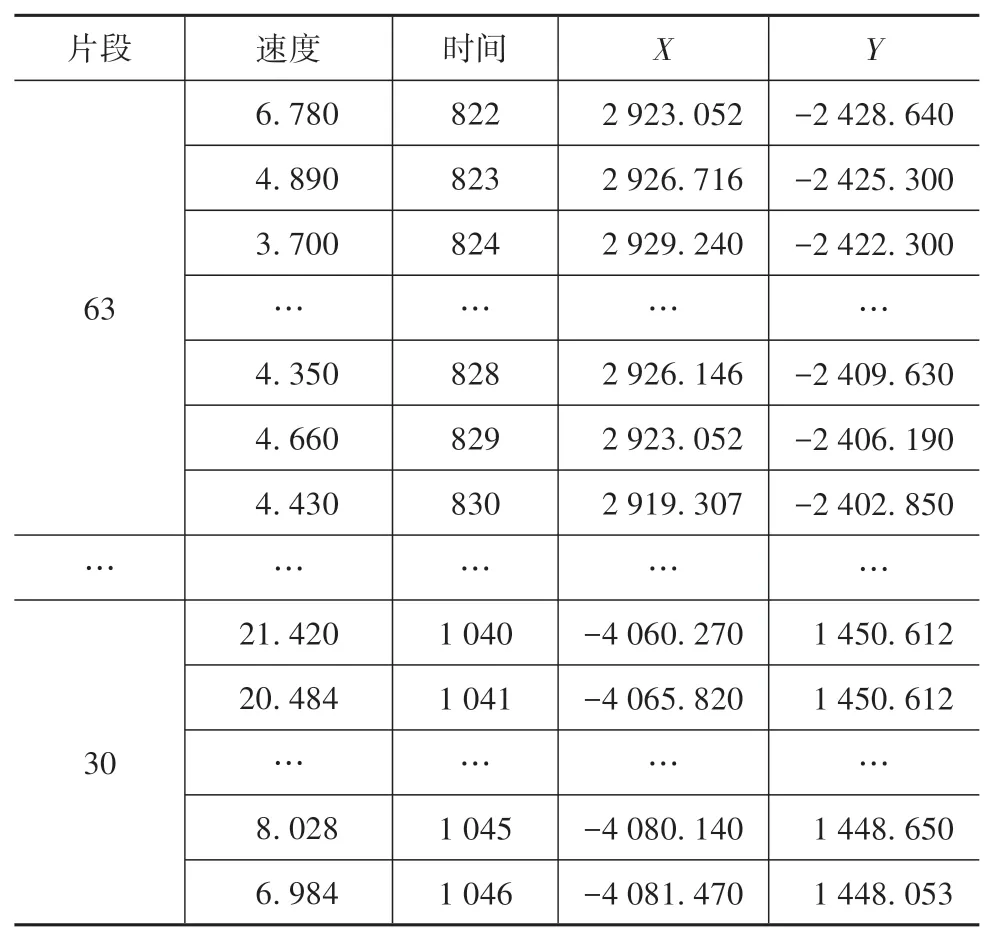
表7 转弯代表性工况
3.2 片段相似度计算
以转弯片段7为例,其轨迹曲线如图8所示。计算片段7与其对应的从城市综合工况中分割出的待替换工况片段之间的相似度,相似度公式如下[34]:
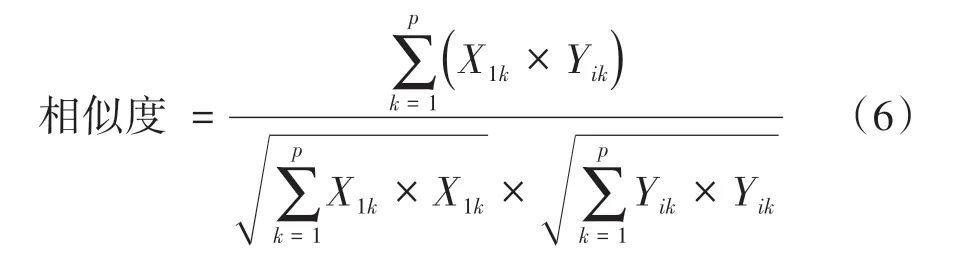

图8 轨迹曲线
分割出的待替换片段如表8所示。
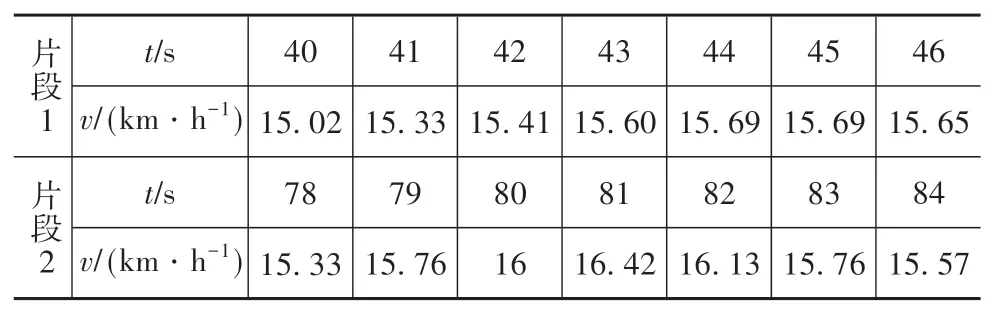
表8 待替换片段数据
计算片段7与待替换的两个片段之间的相似度,得到片段7与待替换片段1之间的相似度最高,为0.997 1。故可以将转弯片段7替换进待替换片段1原来处于城市综合行驶工况里面的位置。
3.3 复合工况构建
对所采集到的其他代表性转弯片段重复上述片段7的操作,即可获得所需的城市弯道复合行驶工况。本文中从提取到的9个代表性转弯工况中选取部分典型工况与城市综合工况对应片段进行拟合,如图9所示。
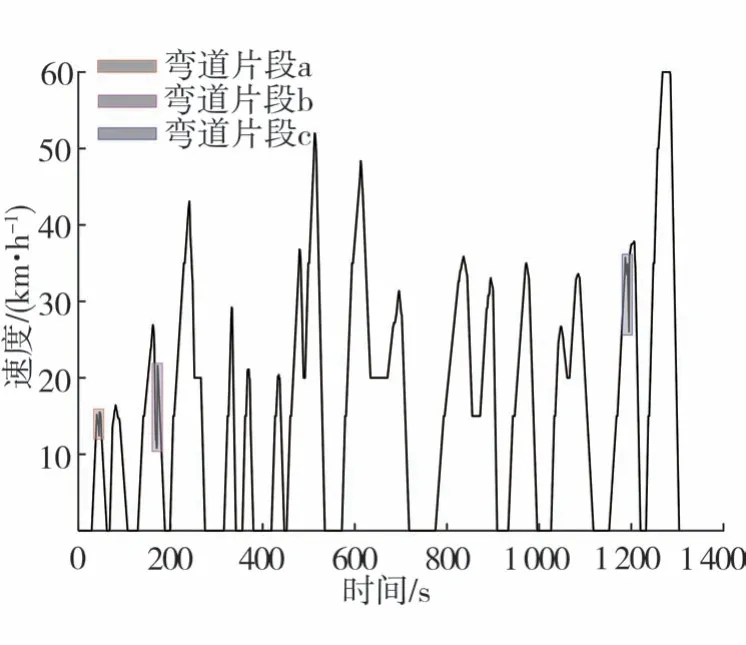
图9 城市弯道复合行驶工况
分别计算所选取的3个代表性转弯工况轨迹和车速的关系,得到的弯道片段轨迹-车速增维曲面图如图10所示。X⁃Y平面为车辆行驶轨迹所在平面,纵轴为车辆行驶速度v。伴随车辆入弯轨迹的变化,同时随着时间的推移,车速也在实时变化,速率大小如颜色栏所示,暖色调速度值高,反之,则低。
从图10可以直观地得到:(1)车辆在刚进入弯道时,车速会随着时间的增加先降低;(2)车辆转弯时,道路弯道半径越大,车辆平均行驶速度越高;道路弯道半径越小,车辆平均行驶速度也越低。以片段b和片段c为例,经过计算和分析,片段b的车速从入弯时的24.0降至10.8 km/h,平均转弯半径为39.0 m,平均车速为14.4 km/h;片段c的车速从入弯时的35.7降至26.1 km/h,平均转弯半径为75.6 m,平均车速为33.0 km/h,符合上述规律。
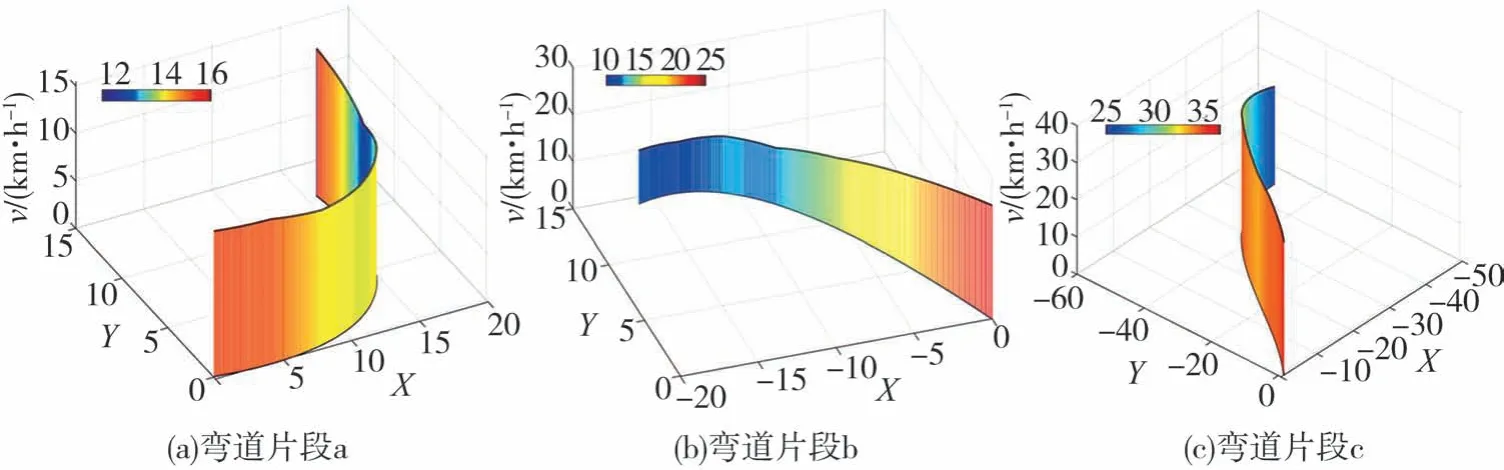
图10 轨迹-车速增维曲面
通过对驾驶员在驾驶模拟器上根据驾驶经验和驾驶习惯仿真出的行驶工况进行主观评价,发现本文中构建的弯道行驶工况更加符合该仿真工况的特征和驾驶员的日常行驶习惯,说明复合行驶工况对车辆的实际运行状况更具指导意义。以上分析结果表明,将弯道工况拟合进城市综合工况而构建的复合行驶工况更能体现出实际驾驶习惯和道路特征。
4 结论
(1)针对目前学术研究领域对汽车弯道行驶工况的探索较为缺失,本文中提出了基于主成分分析和聚类分析法的带有汽车弯道信息的复合行驶工况构建方法。在考虑直接使用聚类分析会导致初始聚类中心的选取存在偏差的问题后,本文中对弯道行驶工况进行优化数据处理,进而获取到准确的弯道行驶实验数据,增加了本次实验的科学性与可行性。实验结果表明本文中构建的轨迹-车速增维曲面图和城市弯道复合行驶工况更符合实际驾驶行为特征和车速变化规律。
(2)本文中提出的构建城市弯道工况的方法可有针对性地评价车辆转弯时的动力性和经济性,尤其是为分布式驱动电动汽车提供更加科学和全面的基于行驶工况的转向协调控制和能耗评价参考依据。根据实际行驶特性,尽管弯道工况在城市综合工况中占比较小,但探究汽车在弯道工况下的运行特性为制定更为准确的循环工况甚至是行业标准提供技术基础,可为系统研究车辆动力学控制尤其是在弯道行驶时的基于驱动节能目的的驱动力优化分配问题提供可行办法。
(3)但本文在研究的过程中也发现,由于城市弯道复合行驶工况是根据城市综合工况的速度特征插入代表性弯道工况,故目前仅对部分工况片段进行增维。后续本文的研究团队将进一步对于城市道路全工况进行深度研究,从而提高车辆循环工况的准确性与典型性。