颠簸路面对双离合器变速器齿轮敲击噪声的影响研究
2021-11-03张飞兵,秦振振,朱丽丹
张飞兵,秦振振,朱丽丹


摘 要:针对某DCT车型整车NVH测评工况中出现的变速箱齿轮敲击与路面颠簸程度相关性问题,本文基于MATLAB 软件平台和工程师对齿轮敲击的主客观评价结果数据,应用决策树算法分析了左右驱动轮转速信号,并训练出分类器,用于该车型产生齿轮敲击颠簸路面的判断。同时基于MATLAB GUI研发了颠簸路面辨识的软件平台,用于指导双离合器变速箱TCU换挡策略,以改善颠簸路面下DCT齿轮敲击噪声品质。
关键词:颠簸路面;齿轮敲击;决策树MATLAB;双离合器变速箱
中图分类号:U461.4 文献标识码:A 文章编号:1005-2550(2021)05-0011-06
The Impact Research of Bumpy Road on Gear Rattle Noise of Dual-Clutch Transmission
ZHANG Fei-bing, QIN Zhen-zhen, ZHU Li-dan
( Dongfeng Dinsin Powertrain Technology Co., Ltd. Wuhan 430058, China )
Abstract: Aiming at studying the correlation between transmission gear rattle noise and bumpy road excitation, in this paper, based on MATLAB software platform and subjective & objective evaluation results of gear rattle noise from dual clutch transmission used in passenger vehicle application, the speed signals of left and right driving wheels are analyzed by using decision tree algorithm, and the classifier is trained to identify the bumpy road which causes gear rattle noise. Meanwhile, a software platform for Bumpy Road Identification was developed based on MATLAB GUI, which was used to guide the dual-clutch transmission TCU shift strategy to improve the gear rattle noise quality on bumpy road.
汽车变速器的齿轮敲击(Rattle)噪声是传动系统的主要噪声之一,对驾乘人员的舒适性影响极大,其根本原因是变速箱内非负载齿轮由于齿轮转速波动在啮合间隙内产生了一系列振动冲击运动[1],这种冲击运动即产生了噪声。通常此噪声是由发动机扭矩波动导致的,但是特定工况下,路面的载荷激励也能导致齿轮敲击。路面的颠簸程度和路面载荷激励直接相关,车辆正常行驶状态下,路面颠簸程度越大发生齿轮敲击的可能性越大[2]。
本文基于大量颠簸程度不同路面下的客观测试数据和工程师对齿轮敲击噪声的经验积累,借助MATLAB软件应用了决策树分析方法,训练出辨别能产生齿轮敲击的颠簸路面的分类器。基于此研发了产生齿轮振动敲击颠簸路面辨识的软件平台,并通过了相关仿真和试验测试验证。该软件平台操作方便、快捷,能较好地实现对颠簸路面的辨识,辨识结果对双离合器变速箱TCU策略的优化意义重大。
1 变速器齿轮敲击噪声机理
颠簸路面下产生变速器齿轮敲击噪声的机理如图1所示,即特殊路面的NVH测试工况中,当汽车正常行驶在鹅卵石路等颠簸路上时,路面载荷激励通过车轮和驱动半轴传递到变速器轴齿上,成为了影响齿轮副敲击载荷的主要因素。由于路面载荷激励和路面颠簸程度强相关,路面的颠簸程度越大,即路面的凹凸不平程度越大,此时路面载荷激励越复杂,前左右车轮转速的波动越明显,客观数据上可用左右轮转速差的波动信号统计特征值来表征。一般是波动的幅值越大,产生齿轮敲击噪声的风险大。
根据某DCT变速箱零部件公司的NVH测试规范,某DCT试验车处于二挡挡位,小油门即10%-15%的油门,车速在10-50kpm时,颠簸路面下会出现预选挡齿轮敲击噪声。针对该问题,本文借助有监督的机器学习对产生变速器齿轮敲击噪声的颠簸路面进行辨识。
2 機器学习简介
机器学习是让计算机模仿人类学习行为,以获取新知识,并重新组织知识结构[3]。针对暂无相关理论公式,数据量较大、变量较多的问题,机器学习利用计算机挖掘大量数据中的规律和潜在信息,广泛用于解决分类、回归、聚类等问题。机器学习主要包括监督式和无监督学习问题。其中,监督式学习是根据已知的输入和输出数据,训练出对应的模型,然后利用模型进行分析预测,主要用于解决分类和回归问题。无监督式学习是从大量的没有标签判断的输入数据中,找出数据的隐藏模式或内在结构。
由于对产生变速器齿轮敲击噪声的颠簸路面的辨识问题属于监督式学习,下面对监督式学习的经典算法进行介绍。
2.1 决策树
决策树模型是根据实例特征自上而下地进行分类的树形模型。该模型由结点和有向边组成。其中,内部节点代表模型特征,叶结点代表一个类。
建立决策树模型的核心步骤是特征选择。确定的损失函数下,决策树的分类算法一般是启发式,每次迭代都会进行特征选择,并分割数据,构建子树,特征选择的方法通常是比较信息增益的大小。信息增益是指信息熵的差或信息熵之比,信息熵是一个描述系统混乱程度的量,其计算公式为:
(1)
式中,G(X)为样本X的信息熵,Ai为特征属性A中第i个取值的先验概率。基于相应理论,对样本集合的每个属性划分集合,把信息增益最大的属性作为下一级叶节点。每个集合中迭代计算,直至子集合的熵到达某一限值。多样本情况下,决策树分类算法对离散属性值的处理效果较好,当属性分类较多时,需要结合剪枝算法来优化模型[4]。
2.2 朴素贝叶斯分类算法
朴素贝叶斯算法是基于贝叶斯定理和特征条件独立假设的一种计算方法,即在先验概率与类条件概率已知条件下,预测类成员后验概率的分类算法。训练出模型的主要目的是计算出定义在输入和输出数据的联合概率分布,最终获取极大化的后验概率。贝叶斯模型的数学表达式如下:
式中,P(Xi )是Xi的先验概率,P(A│Xj )是条件概率,P(Xi│A)为A条件下的后验概率。朴素贝叶斯分类算法要假设在确定条件下分类特征是互相独立的。
针对训练数据集,贝叶斯分类计算过程为,首先根据一定条件下输入和输出数据计算联合概率分布,然后依据该概率分布计算测试数据,并利用Byes定理求出后验概率最大的输出。从理论上讲,朴素贝叶斯算法的优点是精确度高,运算速度快,错误率小,但是需要大量数据样本的支撑[5]。
2.3 神经网络算法
神经网络算法以神经元理论为基础,神经网络模型包含输入层、隐藏层和输出层。该模型把神经元作为网络节点,不同神经元对输入层数据有不同的权值,通过改变不同的权值量,可以挖掘出输入数据中包含的模式信息,并在输出层显示。按信息正向传播的数学模型为:
(3)
式中,Wi和b分别为权重值和初始值,映射关系为一些变体形式,hW,b(x)为输出层结果。
另外,模型的验证是误差的反向计算,数学模型为:
(4)
式中,e為代价函数,y和λ分别为期望值和参数。结合相关优化理论算法,改模型可以确定合适的权值量Wi和初始偏置值b,用于修正模型。
本文基于汽车左右前轮转速差、油温、挡位、车速等信号,在MATLAB中通过上述不同的分类算法,来训练分类器,并结合数据验证最终选择决策树模型训练出的分类器,来辨识发生变速器敲击噪声的颠簸路面。
3 颠簸路面辨识工具开发
根据上文中指定的标准NVH测试工况,本文通过大量采集不同凹凸程度路面下的车辆变速箱TCU信号。主要以车辆左右前轮转速差信号来表征发生齿轮敲击的风险大小。把左右前轮转速差信号的多个特征量作为输入,进行训练分类器。基于该分类器研发出发生变速器齿轮敲击噪声的颠簸路面。
使用数采设备HEAD SQuadriga II采集相关噪声信号,并作为变速器齿轮敲击噪声的客观判断标准。其中,麦克风传感器固定在变速器位置如图2所示。同时通过整车协议读取TCU内的信号。
3.1 信号数据预处理
对车辆左右前轮转速信号采用移动平均值的方法作平滑处理,以便对路面颠簸程度做出预判。指定测试工况中,发生变速器齿轮敲击噪声的颠簸路面下,车辆左前轮的转速信号如图3所示:
其中,蓝色曲线是原始信号,红色曲线是平滑处理以后的信号。由图3可知相对于预处理的信号,原始信号波动较大。
本文对齿轮敲击噪声的辨识,即客观评价方法是利用ArtemiS SUITE 8.3×64软件对噪声信号进行时频分析。对于颠簸路面测试工况,NVH工程师主观评价为存在变速器齿轮敲击噪声,此时对应的图谱为图5所示:
图5显示,测点存在间歇性宽频响应,这是齿轮敲击的时频响应特性。由此可知,在该测试工况下存在齿轮敲击噪声。此时DCT的挡位信息为二挡在挡,预选三挡,发生敲击的齿轮为预选挡位的非负载齿轮。
结合路面激励主导下发生齿轮敲击噪声的相关理论,本文定义分析的目标信号为左右轮转速差的信号,颠簸路面和正常路面上对应的目标信号如图6所示:
根据统计知识可知,一般用于表示信号波动的统计特征为极值、标准差、平均差和方差,对每一段目标信号的统计特征进行计算统计。
3.2 分类器模型的训练
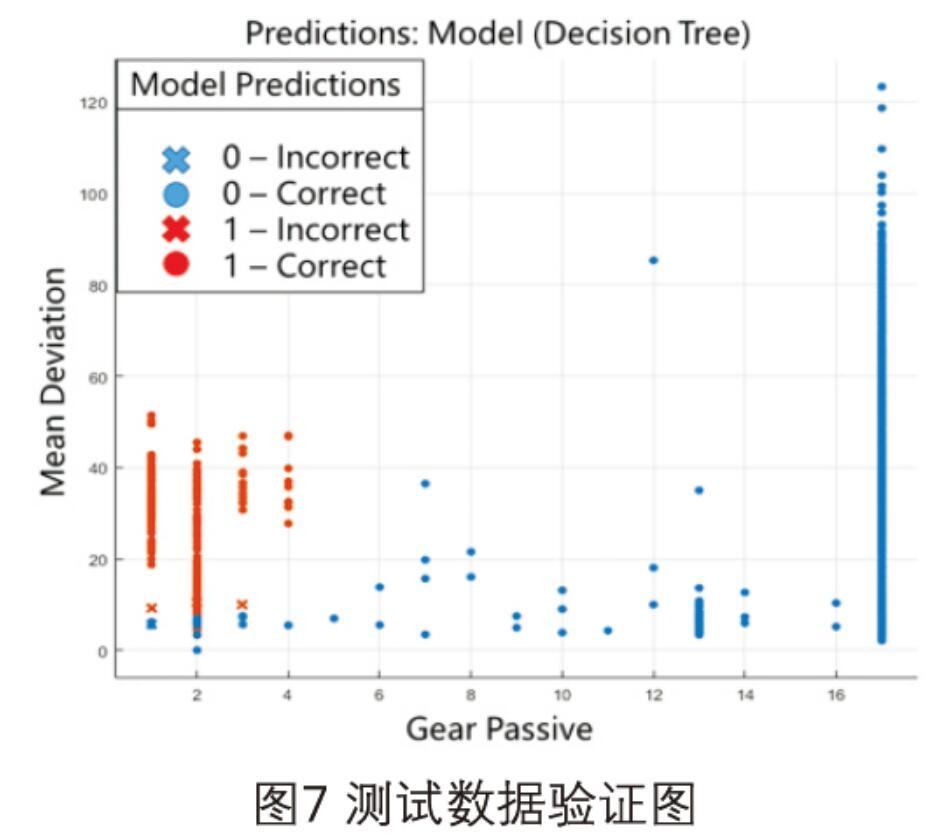
利用MATLAB编程软件进行训练分类器,分类器的类型选择决策树分类器。由于K-CV(K-fold Cross Validation)交叉验证方法可以有效避免训练过程中过度学习和欠学习的发生,本文训练分类器时选用该方法,说服力较强,取K=5。把不同凹凸程度路面上目标信号的统计特征作为分类特征,NVH测评中主、客观一致的结果作为响应输出,即指定测试工况中是否存在变速器齿轮敲击噪声。应用训练出的分类器对测试集数据进行分类,分类结果如图7所示:
图7中,“0”表示没有发生齿轮敲击噪声的正常路面,“1”表示发生齿轮敲击噪声的颠簸路面;“x”表示无效样本,“o”表示有效样本。
图8反映了是预测结果和实际结果的一致性,即分类器的精度,由图8显示结果可知该训练器仿真的准确率极高。
4 颠簸路面软件辨识工具
基于MATLAB GUI和上文训练出来的分类器,利用MATLAB编程开发出了简单版本的颠簸路面辨识软件平台,该工具界面如图9所示:
颠簸路面辨识软件工具的操作流程如图10所示,具体的使用步骤为:
A、双击打开软件脚本Bumpy Road Detection;
B、单击按钮-1.Add Classified Model,加载训练合格的分类器,分类器的格式为mat格式;
C、单击按钮-2.Load Excel data,添加左右轮转速信号,数据格式是Excel格式;
D、设置工况和分析参数,如档位,油门开度,车速等;
E、单击按钮-3.Data_Analysis,对输入数据进行预处理,同步将显示驱动轮速对应处理信号;
F、单击按钮-4.Output_Result,输出分析结果是“Bumpy Road”或“Normal Road”。
第五步流程的输出结果中,前两个子图的蓝色线为车辆左右前轮转速实测信号,红色曲线为平滑处理后的曲线,该曲线可以反映车轮转速的变化趋势。第三个子图为目标信号,可以直观地看出两个车轮转速差信号的波动。参考预处理和可视化的数据,工程师对齿轮敲击噪声可以有一个初期的判断。
该应用工具基于机器学习算法研发出来,操作简单,界面友好,分析结果具有较高的准确性,可以直观地帮助工程师对颠簸路面对变速器齿轮敲击噪声影响判断;同时,软件平台会对数据进行预处理并以图形的形式可视化,让用户对分析对象有一个预判;另外,可以加载不同的分类器,以便于分类器的更新应用。
5 先进算法在变速箱TCU中应用
基于训练出来的分类器中先进算法及阈值,将其集成至当前双离合器变速箱TCU软件中,其主要标定参数设置如下:
vbi_c_FL_Filt_const: =0.05 FL滤波器系数
vbi_c_FR_Filt_const: =0.05 FR滤波器系数
vbi_c_WhlSpd_MeanFilt_const: =0.015均值滤
波器系数
vbi_c_bump_whlSpd_dif_hyst: =5转速差异滞
环限值
vbi_c_bump_whlSpd_dif_thresh: =15转速差
异门限
vbi_c_bump_trig_delay: =15 延时15tike (150ms)
其主要评估参数定义如下:
vbi_FL_filt_dbg FL 滤波后轮速
vbi_FR_filt_dbg FR 滤波后轮速
vbi_whl_spd_diff_filt_dbg 均值滤波后轮速
差异
vbi_bump_trigger_flg_dbg 检测到颠簸路面
标志
vbi_bump_trigflg_delay_dbg 检测到颠簸路
面标志延时处理标志
vbi_pre_select_N_flg_dbg 预选空挡标志
当颠簸路面识别功能激活时,车辆经过轮速信号差异超过标定预设值(该项目训练出分类器中阈值约为15)的路面,将触发颠簸路面标志,并指导双离合器变速箱预选空挡。颠簸路面识别功能激活和未激活对比结果如图11和12所示:
6 结论
结合工程实践经验和相关理论,本文把车辆左右驱动轮转速差信号作为分析的目标信号,分析了颠簸路面对变速器齿轮敲击噪声的影响研究,把目标信号的波动特性作为颠簸路面下发生变速器齿轮敲击噪声的判断依据,即把表征目标信号波动的统计特征参数作为颠簸路面对变速器齿轮敲击噪声的影响因子。
基于决策树算法,利用MATLAB编程软件对大量实测数据和主、客观测评一致的结果训练出合理的分类器模型。基于该分类器和MATLAB GUI平臺研发出颠簸路面辨识工具,该应用操作简单,适应分类器模型的更新,能为工程师对路面激励对变速器齿轮敲击噪声的判断做出参考。而且后续在整车上验证时起到了非常好的效果:将该先进算法集成在变速箱TCU中,用以指导双离合变速箱对颠簸路面的识别并实时取消或恢复预选挡,在保证换档性能的前提下,极大提升齿轮敲击噪声品质。
参考文献:
[1]M.Y.Wang, R.Manoj, W,Zhao. "Gear Rattle Modeling and Analysis for Automotive Manual Transmissions" [J]. Drive System Technique, 2002.
[2]梁明轩,王晓林等.变速器传动系统齿轮敲击噪声参数优化[J].噪声与振动控制,2016,36(2):97-100.
[3]Etherm A.机器学习导论[M]. 范明,昝红英,牛常勇译.北京:机械工业出版社,2009.
[4]王泓正.机器学习在数据挖掘中的应用[J].中国新技术新产品,2018,380(22):103-104.
[5]李玲俐.数据挖掘中分类算法综述[J].重庆师范大学学报(自然科学版),2011,28(4).
