利用CAD技术实现风电设备运输道路 分析的优化研究
2021-11-03苏志勇张丽娜
苏志勇,张丽娜
(1. 山东中车风电有限公司,济南 250104;2. 山东城市建设职业学院,济南 250014)
0 引言
风电设备的运输是风电场建设过程中需要考虑的一个重要问题,风电设备运输道路的分析则是风电场运输过程中的一项重要工作,其中,车辆的弯道分析是费时较多的工作。在进行风电设备运输前,风电机组整机商和运输公司都会对风电设备的进场道路进行详细的道路勘测,选择适宜的道路并制定相应的道路运输方案。在风电设备的运输过程中,主要存在设备超重、超宽、超高、超长等问题,因此在运输道路的勘测和分析过程中,需要对道路参数进行现场确认,并对道路沿线构筑物的尺寸进行测量,从而分析车辆的通行性及运输道路的改造情况。
目前针对风电场项目中风电设备运输道路进行分析研究时大部分都是以道路设计参数[1-2]或建设的经济性[3]为研究目标,并未从如何提升分析精度和提高分析工作的效率这2个方面入手进行研究分析。基于此,本文以风电设备中的超长设备——叶片的运输为研究对象,主要对其在运输过程中如何通过弯道进行了分析研究,提出了一种可实现便捷分析的优化方法,即利用计算机辅助设计(CAD)技术对风电场项目中风电设备运输道路分析时的过程进行了优化,同时利用编程语言提升了运输道路分析工作的效率。本优化方法以叶片运输为例,但该方法也可作为运输其他风电设备部件的参考,以期有效提高运输道路分析的精度,同时减少风电设备运输道路分析的工作时间。
1 风电场项目中风电设备运输道路分析的主要任务
在风电设备运输道路的分析中,主要任务是确定是否需要对运输道路进行改造,以及如何快速找出需要进行道路改造的位置,而这也是在风电设备运输道路分析过程中耗时最长的工作。本研究所涉及的风电场项目中风电设备运输道路分析主要是指风电场项目中风电机组叶片运输时的道路分析。
风电机组叶片的运输主要包括2种方式,分别为直运和倒运。通常在无道路障碍的情况下采用直运方式,运输车辆通常采用抽拉式板车;在有道路障碍的情况下采用倒运方式,道路障碍一般包括山体、树木、河道及道路限制等,采用倒运方式时车辆通常采用扬举车。
风电场项目中风电设备运输道路分析的主要工作流程如图1所示。
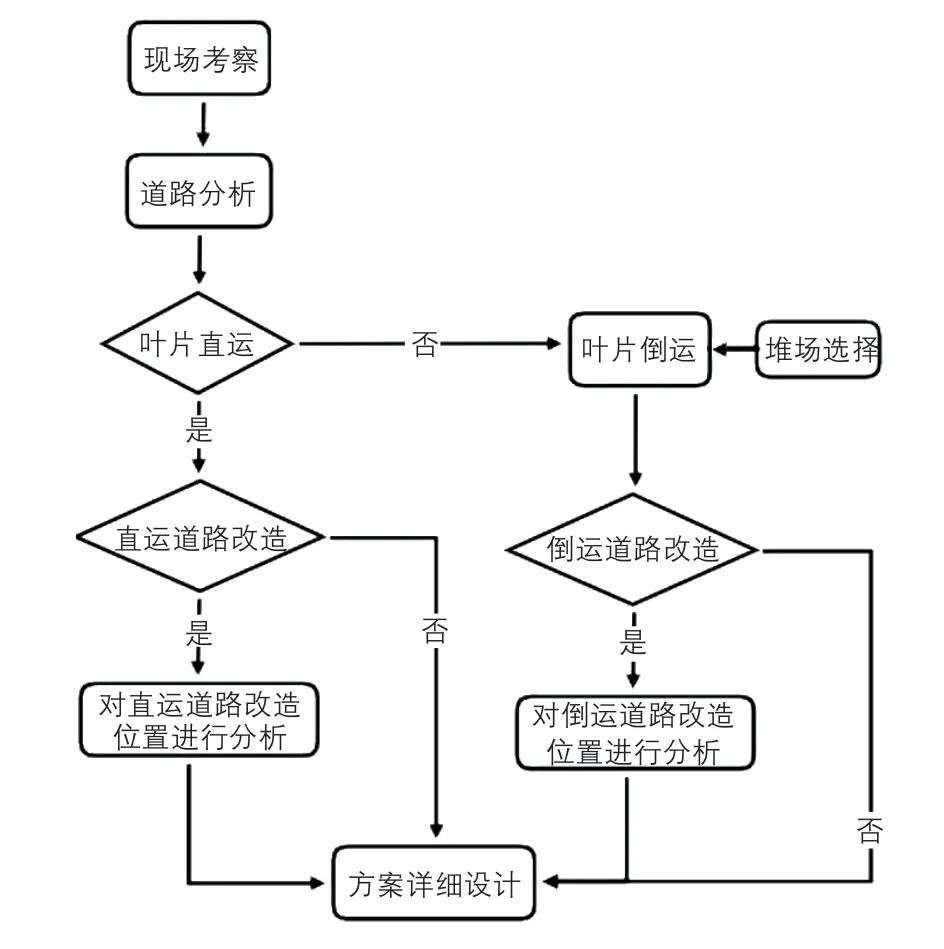
图1 风电场项目中风电设备运输道路分析的主要工作流程Fig. 1 Main workflow of transportation road analysis of wind power equipment in wind farm project
从图1可以看出,风电机组叶片的运输会涉及到直运和倒运2种运输方式,而叶片的运输道路分析是风电场项目中风电设备运输道路分析的核心内容。
本优化研究中所涉及到的软件工具主要包括:AutoCAD 2016软件、Global Mapper 20软件、Google Earth 7.0软件、OruxMaps 7.2软件、AutoTURN 9.0软件(AutoCAD扩展工具)。
2 风电场项目中风电设备运输道路分析工作的优化
风电场项目中风电设备运输道路分析工作主要分为3个步骤,具体为:1)如何精确地对风电场项目中风电设备运输道路进行建模;2)分析风电场项目中风电设备运输道路是否需要进行道路改造;3)如需进行道路改造,快速找出要进行道路改造的位置。本研究针对这3个步骤分别进行了优化。
2.1 优化方法研究的主要过程
2.1.1 风电场项目中风电设备运输道路的精确建模
现场考察风电场时,对实际道路的勘测(下文简称为“路勘”)通常是采用轨迹记录的方式对风电场项目现场的路勘路线进行记录,记录完成后直接采用Google Earth软件进行道路分析。虽然该方法较为常用,但一般不对风电场项目中整体的风电设备运输道路进行建模;并且由于Google Earth软件的特点,该方法得到的运输道路分析的精度相对较低。
针对常用方法的弊端,本文的优化方法是采用OruxMaps 7.2软件对风电场项目现场的路勘路线进行记录,此过程与常用方法类似;记录完成后,将其导入Global Mapper 20软件中,对所记录的路线进行后期加工,并采用Google Earth 7.0软件进行路线的卫星图修正;完成路线修正核对后,将形成的路线图导入AutoCAD 2016软件中,在AutoCAD 2016软件中将路线图转化为道路图,实现对风电场项目中整体的风电设备运输道路的精确建模。
2.1.2 风电设备运输道路的改造分析
在对风电设备的运输道路进行改造分析时,常用方法是采用直接测量的方式,直接测量道路弯道处的尺寸,并与车辆通行时的主要参数进行对比。但该方法不对车辆在弯道处的运行轨迹进行模拟,无法绘制车辆在弯道处的完整轨迹图,因此其对于进行道路改造分析时提供的信息并不完善。
针对常用方法的弊端,本文的优化方法采用AutoTURN 9.0软件实现了车辆在弯道处完整运行轨迹的模拟。主要流程是在Auto TURN 9.0软件中对现场风电设备运输时所用车辆进行建模,完成车辆建模后在道路模型的基础上利用该车辆模型进行其在现有运输道路的弯道分析,生成车辆在弯道处的运行轨迹模拟,从而确认风电场项目中现有风电设备运输道路是否需要进行道路改造。
2.1.3 道路改造位置的快速标记
完成车辆运行轨迹的模拟后,利用AutoCAD 2016软件中自带的Lisp语言实现车辆轨迹线与道路边线的交点(即需要进行道路改造的位置)的快速查找与标记,从而可加快人工查找的速度。
2.2 优化方法的具体实施步骤
2.2.1 风电场项目中风电设备运输道路的精确建模
在完成道路路线的修正核对后,将该路线图导入AutoCAD 2016软件中,并以此运输路线作为道路中心线;通过对比运输路线的卫星图和现场记录,采用线段偏移命令和交点拉伸命令使绘制的道路边线与实际道路边线重合,以便于为后续分析提供精确的道路模型。
2.2.2 风电设备运输道路改造分析
分析风电设备运输道路的弯道情况,将弯道情况按不同转弯半径、转弯角度进行汇总,分析拟用车辆在不同弯道参数下的通行情况。考虑到目前风电场项目中采用的风电机组叶片的具体情况,本文以长度为80 m的叶片为例来说明在不同弯道情况下的运输道路改造。弯道的主要代表参数如表1所示。
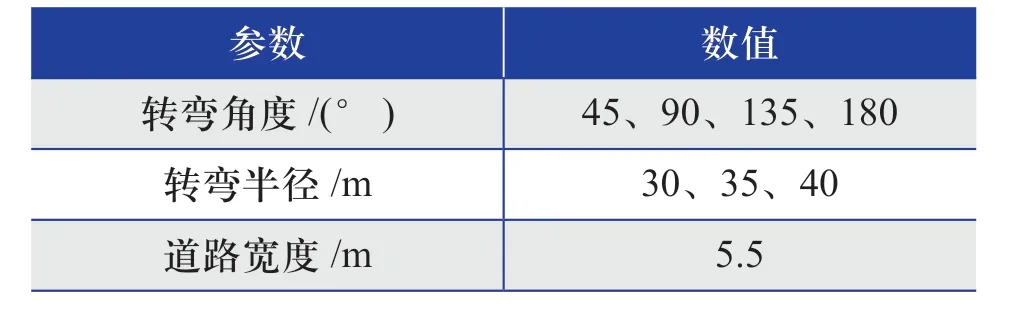
表1 弯道的主要代表参数Table 1 Main representative parameters of curve
以叶片运输时采用抽拉式板车为例进行计算分析,叶片装载后的总车长(含车头)为87.7 m。为简便分析,各弯道入口及出口直线段的长度均为100 m。
在进行道路的精确分析时,需要采用做图法绘制车辆的运行轨迹和叶片扫掠区域。若该过程不借助软件工具,则工作量较大,耗时较长,因此本文采用AutoTURN 9.0软件进行辅助分析,可以大幅缩短绘图时间。在AutoTURN 9.0软件中设置车辆的相关参数后,通过为车辆指定运行路线,软件可自动绘制出叶片扫掠区域的图像。
以转弯半径设置为40 m、转弯角度设置为180°的弯道为例,对采用AutoTURN 9.0软件绘制的叶片扫掠区域图像进行简要说明。该弯道情况下的车辆运行轨迹及叶片扫掠区域分析图如图2所示。图中,绿色线为车辆运行轨迹和此时对应的叶片扫掠区域。
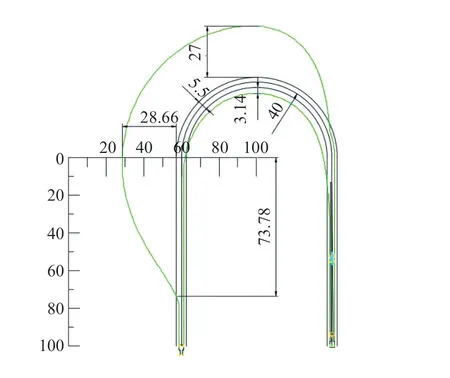
图2 转弯半径为40 m、转弯角度为180°时的车辆运行轨迹及此时对应的叶片扫掠区域分析图(单位:m)Fig. 2 Analysis diagram of vehicle running trajectory and corresponding blade sweeping area when turning radius is 40 m and turning angle is 180°(unit:m)
从图2中可以看出,车辆在距弯道中心73.38 m时开始向道路外侧甩尾,而叶片的最大扫掠宽度为28.66 m,叶片扫掠区域在车辆行至弯道另一侧的结束处时截止。
从上述实例中可知,应用AutoTURN 9.0软件绘制的叶片扫掠区域结果图可以便捷地分析出车辆通过弯道时所需占用的区域。将通过AutoTURN 9.0软件生成的不同转弯半径及不同转弯角度下的车辆运行轨迹及其对应的叶片扫掠区域图进行汇总,具体如表2所示。
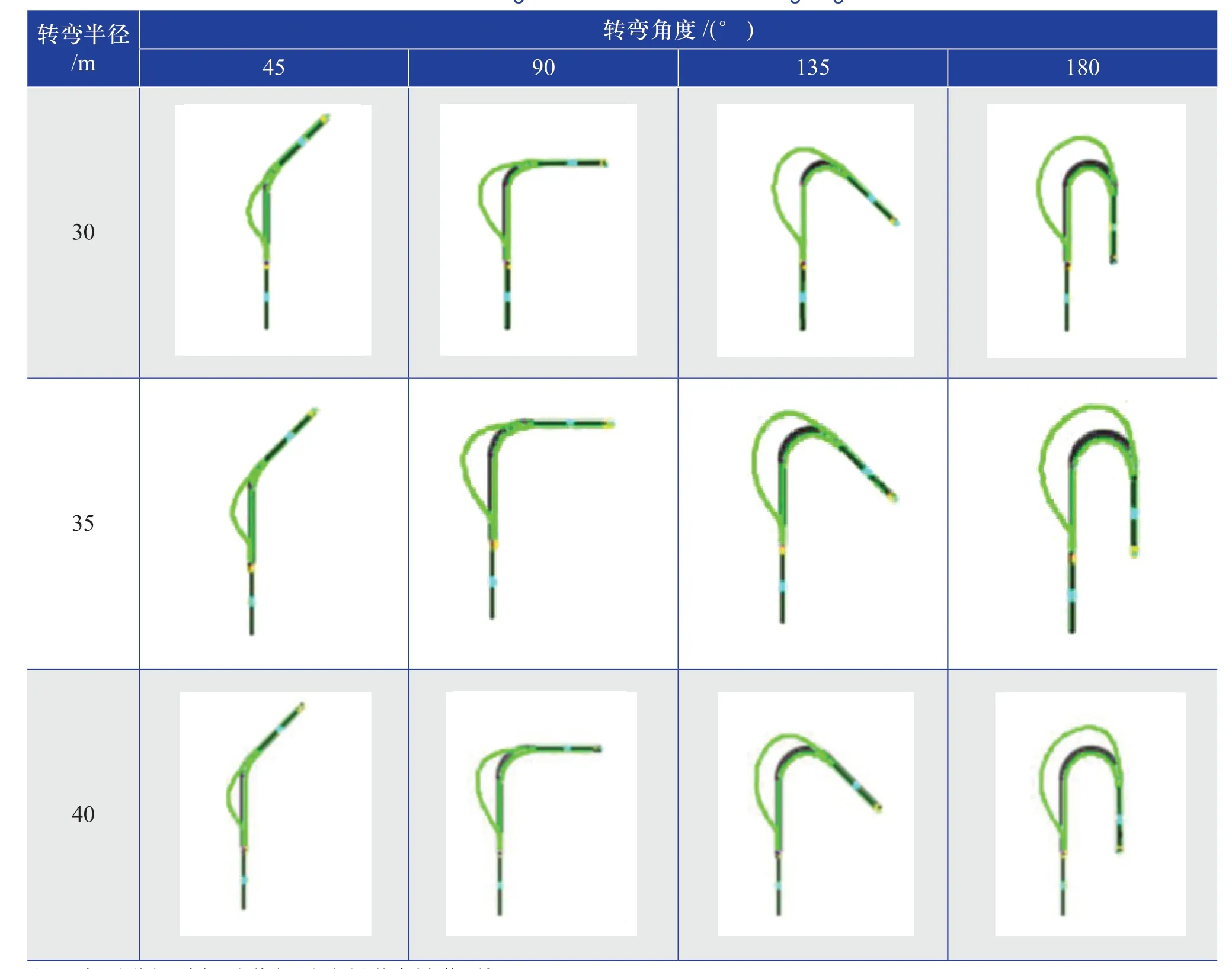
表2 不同转弯半径及不同转弯角度下的车辆运行轨迹及对应的叶片扫掠区域图汇总Table 2 Summary of vehicle running trajectory and corresponding blade sweeping area diagram under different turning radius and different running angles
不同特征参数下车辆通过弯道时叶片的主要扫掠参数汇总如表3所示。
在利用软件绘制车辆运行轨迹和叶片扫掠图像时,当出现转弯半径不足的情况时,会导致车辆运行轨迹不完整,此时可通过调整车辆运行路线来扩大转弯半径,以此来完成车辆运行轨迹的绘制。
采用AutoTURN 9.0软件可实现对车辆通过弯道时运行轨迹的完整绘制,从而提升风电设备运输道路分析的精度;同时该软件也可以生成车辆通过弯道时的动画,方便进行项目方案的展示。
2.2.3 道路改造位置的快速标记
在完成车辆运行轨迹模拟后,需要对将进行道路改造的位置(即车辆运行轨迹线与道路边线的交点)进行查找和标记。为加快人工查找的速度,避免遗漏,本文采用AutoCAD 2016软件中自带的Lisp语言进行脚本开发来实现道路改造位置的查找和标记。
道路改造位置的查找和标记功能的主要代码如图3所示。
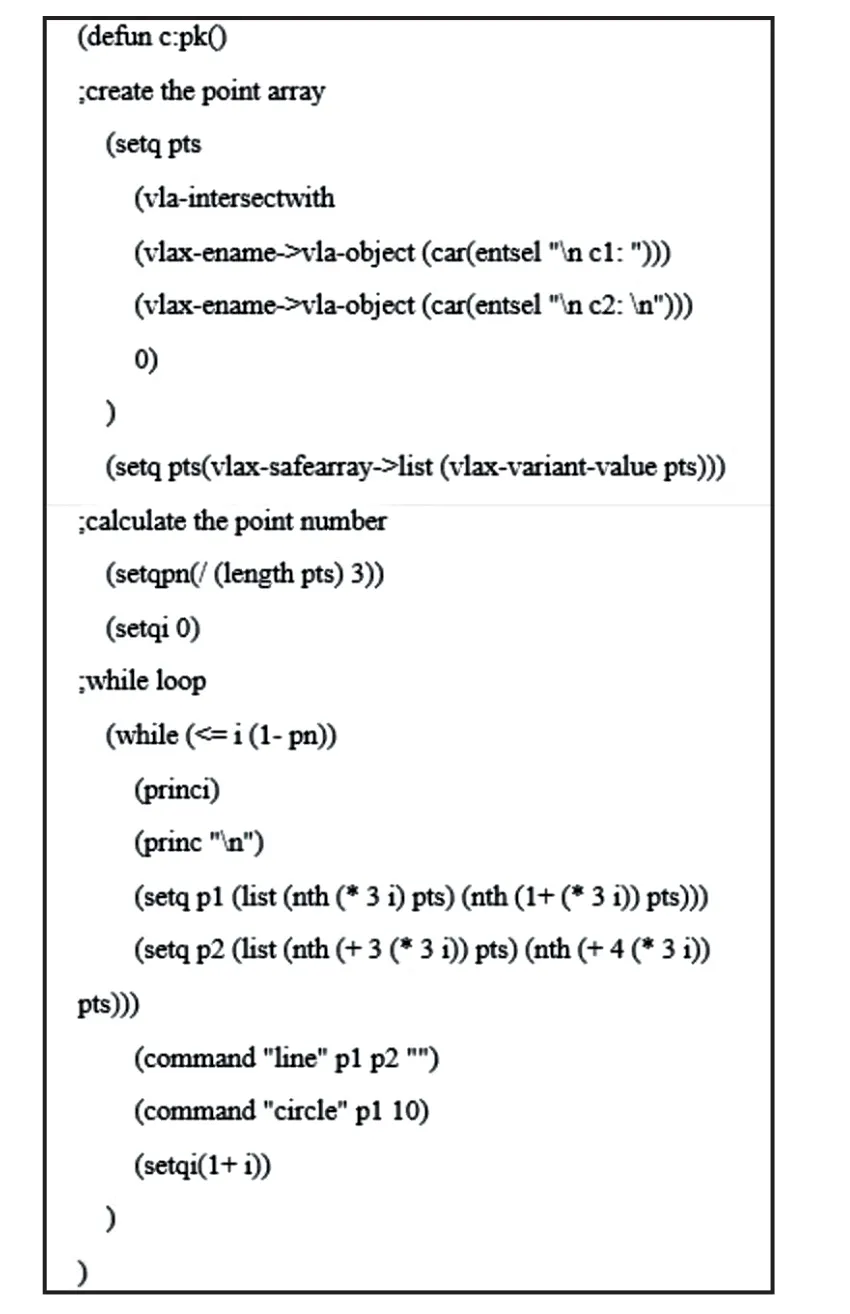
图3 道路改造位置的查找和标记功能的主要代码Fig. 3 Main code of function of finding and marking location of road reconstruction
通过上述代码可实现对指定线段间交点的快速查找及标记。测试线路道路改造位置的交点标记示意图如图4所示。
从图4的原始图和标记图对比可以看出,通过道路改造位置的查找和标记功能程序可在每个线路交点处绘制半径为10 m的圆,并且将各交点用直线进行连接,便于查找。
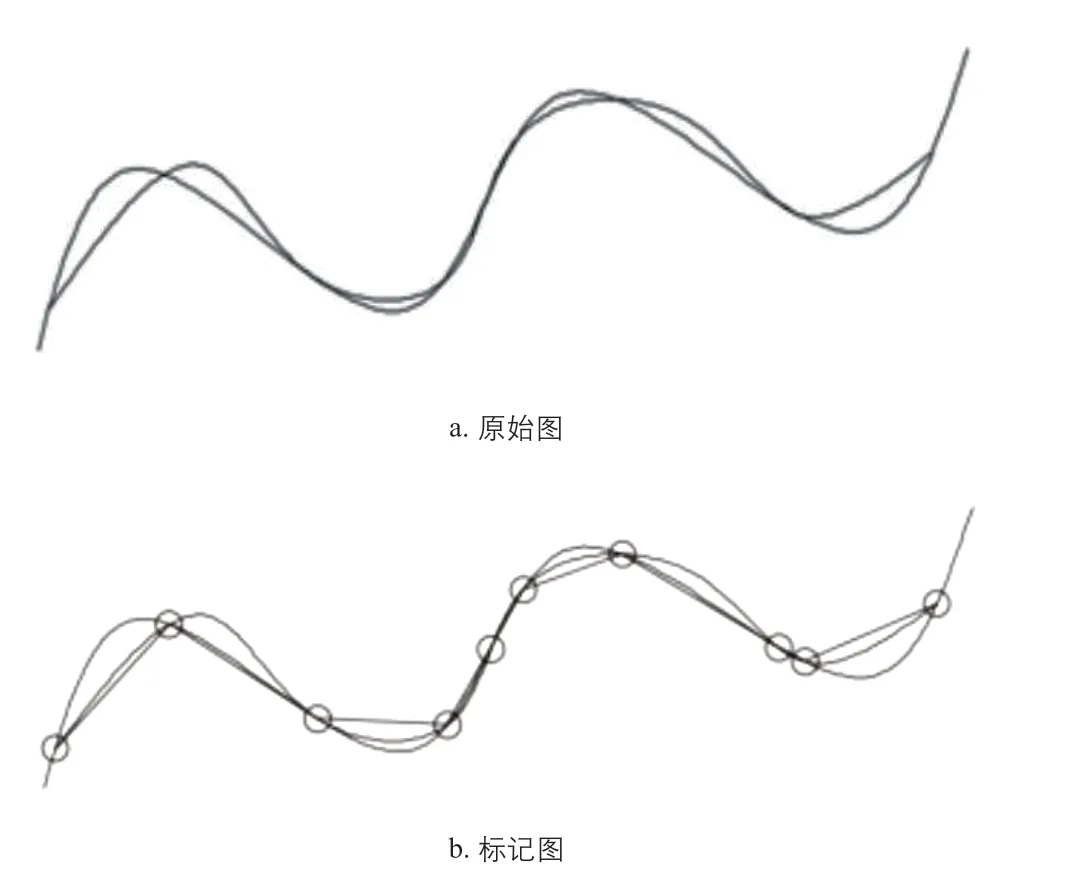
图4 测试线路道路改造位置的交点标记示意图Fig. 4 Schematic diagram of intersection point mark of road reconstruction location of test line
3 实例分析
以下通过某实际风电场项目对本研究提出的利用CAD技术实现风电场项目中风电设备运输道路分析的优化方法进行验证说明。
实例项目为南方某风电场项目,风电设备运输道路总长度为35.2 km;该项目位于山地,弯道较多,因此考虑到项目中风电设备的实际运输情况,决定采用扬举车进行风电机组叶片的运输,以减少道路的改造难度。不同厂家生产的扬举车的车辆总长度不同,本项目采用的扬举车的车板长度为13 m,车辆总长度为19.94 m。该项目中风电设备的整体运输道路路线图如图5所示。
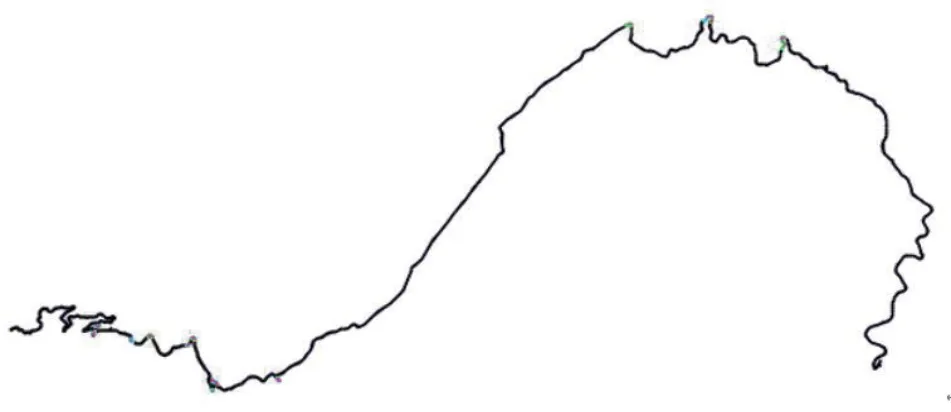
图5 该项目中风电设备的整体运输道路线路图Fig. 5 Route map of overall transportation road of wind power equipment in this project
对路线图进行修正核对后,将路线图转化为道路图,并将生成的运输道路与实际道路进行重叠,从而完成运输道路建模。生成的运输道路与实际道路的叠加图如图6所示。

图6 生成的运输道路与实际道路的叠加图Fig. 6 Overlay map of generated transportation road and actual road
通过本研究提出的风电设备运输道路分析优化方法对该风电场项目的风电设备运输道路进行分析,整理并生成弯道部分的叠加图,方便进行后续方案评价。
车辆通过无需进行道路改造的弯道处的运行轨迹图如图7所示,车辆通过需要进行道路改造的弯道处的运行轨迹图如图8所示。

图7 无需进行道路改造的弯道处的车辆运行轨迹图Fig. 7 Vehicle running trajectory picture at curve without road reconstruction

图8 需要进行道路改造的弯道处的车辆运行轨迹图Fig. 8 Vehicle running trajectory picture at curve requiring road reconstruction
从图7和图8可以看到,从车辆通过弯道的运行轨迹可以直观地分析出运输道路需要进行改造的具体位置,以方便后续对运输道路的改造工程量进行分析。
4 结论
本文应用CAD技术提出了一种可实现风电场项目中风电设备运输道路分析的优化方法,可便捷地分析不同的弯道情况。应用该优化方法可实现对风电场项目中风电设备运输道路的精确建模、对弯道处车辆运行轨迹的模拟,以及对运输道路改造位置的快速查找和标记,便于进行运输道路改造的分析,从而可有效提升风电场项目中整个风电设备运输道路分析工作的效率。
