CAN总线化工机械的智能化终端平台设计与实现
2021-11-01秦洪浪
秦洪浪
(陕西工业职业技术学院 航空工程学院, 陕西 咸阳 712000)
0 引言
CAN总线是一种技术先进,可靠性与稳定性较高,功能健全的远程控制模式,已实现了在各个领域的广泛应用。当前国内相对缺乏以CAN总线为基础的化工机械智能化终端平台,并未充分合理利用CAN总线的优势作用,同时机械智能化终端大部分存在功能过于单一化,一体化集成结构太过复杂,升级优化需拆机更换ROM存储芯片,显示实时性较差,监控数据信息不完善,操作不便捷等各种问题[1]。据此,本文设计了CAN总线化工机械智能化终端平台。
1 CAN总线技术分析
CAN即国际标准化组织的串行总线通信协议,CAN总线是支持分布式控制或实时控制的串行通信网络,称之为工业自动化控制领域的计算机局域网。以CAN总线为基础的分布式控制系统可实时可靠传输各个节点间的数据信息,因此得以在化工自动化、工业自动化、船舶设备等各个领域实现了广泛应用。1993年11月,ISO正式颁布了道路交通运载工具-数字信息交换-高速通信CAN国际标准ISO11898,在很大程度上为CAN标准化与规范化推行奠定了坚实的基础。CAN总线是自动化领域技术发展的主要热点,CAN控制器基于CAN-H与CAN-L共同构成通信总线。CAN总线信号是通过二者间的差分电压所决定的。在CAN-H为3.5 V,CAN-L为1.5 V,差分电压为2 V时,代表显性逻辑;在CAN-H为2.5 V,CAN-L为2.5 V,差分电压为0 V时,代表隐性逻辑[2]。
CAN协议与传统总线网络之间的最大差异是编码通信数据块,促使网络全部节点可实时接收相同数据,从而保障了控制系统实时性与可靠性。通信数据短帧结构,各帧包含起始段、仲裁段、控制段、数据段、循环冗余校验段、方管段、结束段。数据段为8个字节有效数据,校验段具备错误处理功能,短帧结构数据传输时间较短,可降低干扰影响,提升通信可靠性与稳定性。
CAN总线以多主竞争式总线结构为载体,通过非破坏性仲裁技术,CAN总线的任意节点可在任何时刻主动面向网络其他节点传输信息,并且不分主次,可于各节点自由通信。在两个节点同时面向网络传输数据时,优先级较低的节点会主动停止传输数据,较高的节点可以不受任何影响地持续性传输,从而防止总线冲突。节点还可同时进行相同数据接收。这些特性促使CAN总线生成的网络各节点间的数据通信实时性相对较强,并且比较容易生成冗余结构,提升了系统可靠性与灵活性。而CAN总线节点发生严重错误时,可自动关闭总线,从中脱离,从而保护网络其他节点之间的通信不受外界影响。总线节点可就报文ID直接决定接收或者屏蔽报文。
2 CAN总线化工机械智能化终端平台设计
2.1 终端平板整体设计
CAN总线即控制器局域网,是当前应用最为普遍的现场总线模式,不仅可靠性与稳定性良好,且功能健全,成本较低,已实现了在汽车电子、电力系统、自动控制等多领域的广泛应用。现阶段CAN总线技术于化工机械中应用愈发普遍化,而很多关键零件生产的控制器、传感器、执行器等大都以CAN总线为基础加以控制,以此高效保障了整机可靠性、稳定性、可检测性、智能性。
为解耦智能化终端平台与既有电液控制系统,并实现在协同工作的同时,又彼此保持独立,本文设计了CAN总线分布式控制方案,在主机子系统CAN网络中接入了智能化终端平台,以此面向子系统提供多项功能,即联接、感知、计算、记忆等等,并基于功能在智能化终端平台上实现定制式应用。CAN总线化工机械分布式智能化终端平台接入[3],具体如图1所示。

图1 智能化终端平台接口
智能化终端平台基于CAN总线,与主机电控系统相互对接,以无线通信与远程云平台、近程智能手机等各种移动终端相衔接,以此为各种操作人员提供数据信息,为电控系统提供物联网服务,并以内置传感器为载体,获取主机实时运行状态,从而基于智能化终端平台中运转的各种应用,为控制器提供多元化、智能化功能。
2.2 CAN总线接口电路设计
CAN总线接口电路硬件基于CAN总线主站电路板与从站电路板共同构成,由于CAN接口配置的工控机并不多,成本较高,而带有RS232串口的工控机较为普遍,所以CAN总线主站电路板以RS232转CAN技术。CAN总线接口电路结构[4],具体如图2所示。
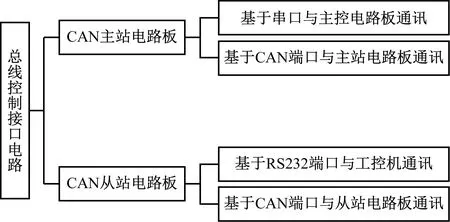
图2 总线接口电路结构
2.2.1 主站电路设计
为保障通信可靠性与稳定,CAN控制器与收发器之间添加了光电耦合器,以隔离光电。CAN主站电路结构,具体如图3所示。
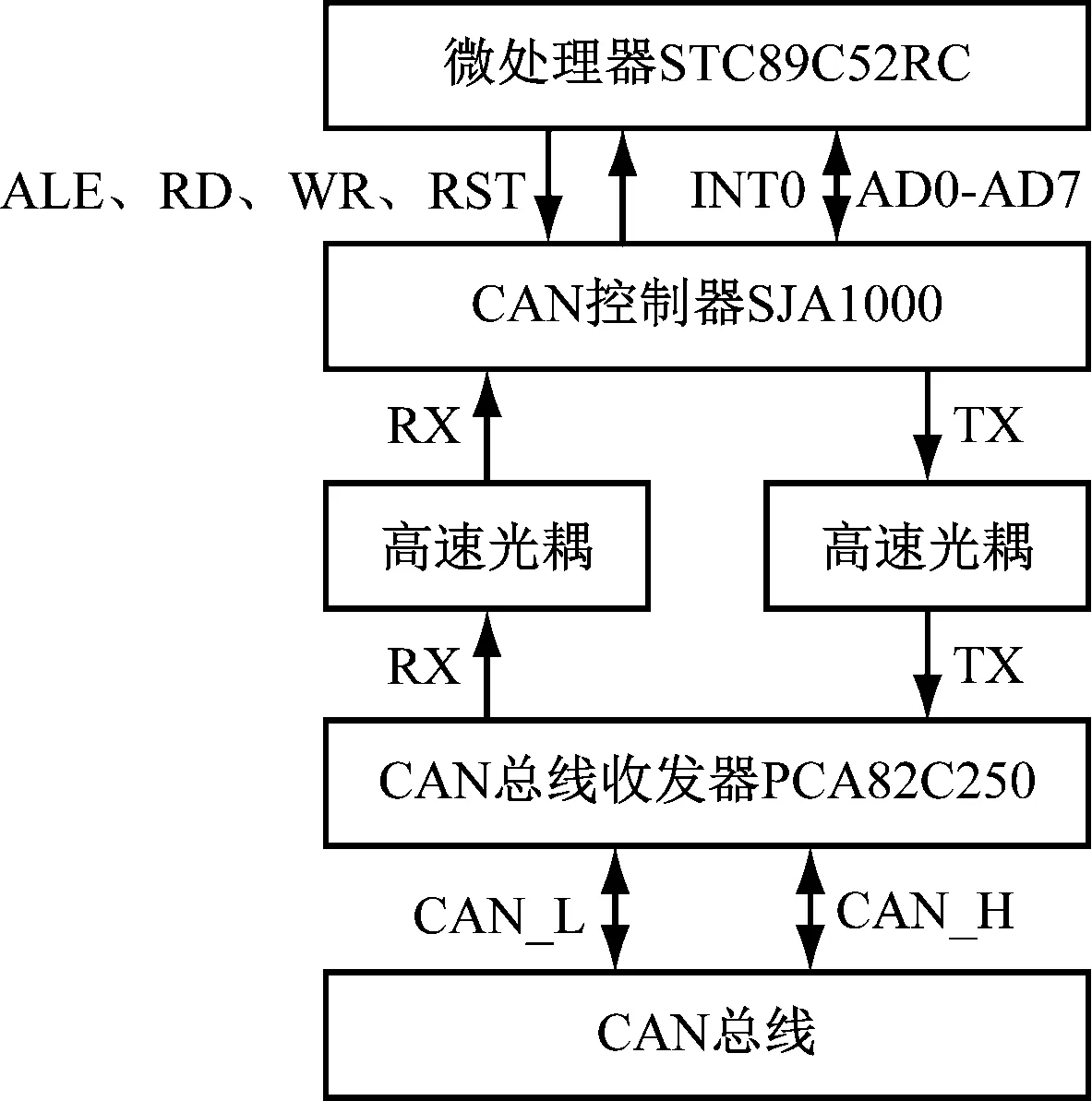
图3 主站电路结构
2.2.2 从站电路设计
CAN从站电路与主站电路结构类似,由于无需与上位机相互通信,因此省去了RS232串口通信部分,而为提升系统可靠性,从站电路与主控电路同样设置了电机驱动硬件接口电路,结构相一致。CAN从站电路结构如图4所示。

图4 从站电路结构
2.3 终端平台软硬件设计
2.3.1 硬件设计
CAN总线化工机械智能化终端平台硬件框架[5],具体如图5所示。

图5 终端平台硬件框架
其中主控模块是硬件核心所在,包含ARM+DSP双核处理器,即主频1GHz的ARM Cortex-A8 MPU核与800MHz的TMS320 C64x+DSP核,同时集成融合了2D/3D图形加速器。由于具备DSP,主控模块不仅可完成基于乘加运算、矩阵运算、三角函数、浮点运算的繁杂数学计算部分,还可实现图形图像格式转换与处理分析算法。主控模块ARM核主频相对较高,接口多元化,内存非常大,可同时接入现场设备与远程设备,并实现数据实时交互。
4G功能模块。基于ME3630全网通工业级模块实现4G功能,以贴片式焊接工艺,确保化工机械振动。于待机模式时,还可接收短信,唤醒主系统。同时以USB接口为载体与主控模块实现彼此通信。
蓝牙功能。利用EH-MC10低能耗工业级模组,支持蓝牙4.0协议、数据通信。并基于UART接口与主控模块相互通信。
WiFi功能。通过HF-ALL模组实现WiFi功能,以2.4 GHz频段,支持802.11b/g/n与AP等多项功能。以网口为载体实现和主控模块之间的通信,同时支持UART接口配置WiFi模块。
存储功能。基于Micro SD卡进行存储,最大容量为32G,以SDIO接口接入主控模块,完成二者相互通信。
定位功能。利用MAX-8Q工业级模块准确定位,此模块不仅体积较小,能耗偏低,而且稳定性与可靠性良好,电路实现相对简单,同时支持GPS与北斗系统。通过UART接口与主控模块彼此通信,且可基于IIC接口合理配置模块。
主控模块。集成两路工业级CAN控制器,对外衔接附带电镀隔离的CAN转发器,且信号传输速率可以达到1 Mbps。
硬件严格遵守工业级相关标准进行设计,与宽温、宽压、电磁兼容等相关要求高度相符。
2.3.2 软件设计
CAN总线化工机械智能化终端平台软件以嵌入式Linux为载体进行开发,为实现软件平台化与可扩展性,遵循了模块化与层级化设计原则。软件主要划分为4个层次[6],具体如图6所示。

图6 终端平台软件框架
板级支持包BSP层分析。以Linux内核为基础开发板级支持包BSP层,其为软件框架最底层,负责为硬件提供资源。其中包含文件系统、网络接口、设备驱动。文件系统的作用是为终端平台提供相关支持,系统Flash、TF卡数据、文件读写都是基于文件系统接口实现的;网络接口负责提供TCP/IP协议栈支持与Socket编程接口;设备驱动的作用是提供板载外接设备与接口的应用运行接口,同时支持定位、速度、模拟信号采集、音频视频采集、CAN总线、WiFi、蓝牙、4G等等。
基础组件/库层分析。负责提供应用框架与智能化应用所需动态库,即发行版常用库、物联网应用常用库、CAN应用协议库。面向非标准化智能化终端平台外接设备驱动,提供与其相适应的适配层硬件HAL组件,其可有效解决硬件升级引发的兼容性问题,同时还提供面向主机应用的智能化算法库组件,其支持研发者在授权下适度扩展,以实现定制式相关要求。
应用架构层分析。基于化工机械智能化应用需求,高度抽象而得的通用功能模块与应用框架。
智能化应用层分析。应用研发者以应用架构层代码为辅助,根据产品个性化与差异化要求,完成实际应用研发。
2.3.3 订阅发布机制设计
规范标准的应用架构层,是保障平台二次开发友好性的重要前提。因此,针对应用架构层实现了终端平台化,以订阅发布设计模式,解耦了多项模块,强化了应用架构易扩展性。化工机械智能化终端为数据融合载体,衔接了多种CAN总线传感器与控制器设备,并内置了定位与温度等传感器,所需采集数据信息海量繁杂。就此数据应用场景也十分复杂,其中部分需单独储存,部分需通过解析处理,并打包传输于云平台与智能手机App,其他部分则需采取特定算法完成数据运算,并反馈结果于电液控制系统。而各种场景对于数据的应用,都需确保实时性。在智能化终端应用中,为实现多应用对多数据运用的安全性、实时性、灵活性设计,引进了订阅发布机制。
此机制明确了一对多的依赖性关系,促使多订阅者共同监控同一主题对象。此对象在状态实时变化时,会快速提示全部订阅者,以确保其可及时自动更新自身状态。订阅发布机制[7]具体如图7所示。

图7 订阅发布机制
其中将基于CAN总线、内置传感器、定位模块、电源管理模块的底层数据信息,统一封装为不同主题,由底层数据管理模块为发布者,进行实时发布。此模块不仅负责提供数据信息,还提供数据采集策略配置接口。而应用架构服务模块只需关注订阅所获数据接口即可。应用架构层服务模块通过相同模式,明确定义应用程序所关注交互数据为不同主题,以供业务逻辑层应用。
通过各主题解耦底层数据与业务逻辑,应用程序只需关注相关业务逻辑,以积木式模式,根据需要激活并配置应用架构供给的模块,并详细填写应用代码。此开发模块不仅可保障二次开发便捷性与灵活性,还可保留框架整体性,在很大程度上提高了终端软件质量。
3 CAN总线电液控制系统设计
化工机械电气控制系统是机械自动化控制系统的核心环节,而电液比例控制技术是提升设备自动化水平的关键途径。机械电液控制系统不仅可有效提升生产效率,还可降低劳动强度。基于远程遥控操作,可有效改进优化生产环境,保障化工生产安全性。系统基于CAN通信网络所构建分布式控制系统,以主控制器为核心,同时就PWM控制器、遥控器、人机操作界面,整体应用机械、液压、电子技术、控制技术、网络通信技术,从而设计化工机械设备综合电液控制系统,其结构具体如图8所示。

图8 电液控制系统结构
4 CAN总线化工机械智能化终端平台二次开发
CAN总线化工机械智能化终端平台二次开发包括SDK(软件开发套件)与IDE(集成开发环境)。SDK基于固件、应用架构代码、应用程序构成,并与IDE打包为一体,供给应用研发者。
CAN总线化工机械智能化终端为嵌入式电子产品,不具有开发能力,直接于硬件编写并调试软件难度较大。当前嵌入式软件开发,即基于PC编写代码,并通过交叉编译形成目标平台可以运行的二进制固件,然后烧写于硬件运转并调试。基于安全性与友好性,面向智能化应用开发调试,制定了以Eclipse平台为载体的解决方案。Eclipse平台提供了完整的基础框架,应用程序可以此为功能插件集成于Eclipse。
以Eclipse平台为辅助,本文深层定制研发了CAN总线化工机械智能化终端的IDE,集成了具备智能化终端的SDK、C/C++开发套件、交叉编译器,支持面向目标机应用程序的项目管理、源代码编辑、项目建构、交叉运行、调试、测试、固化等多元功能。而IDE运行于Windows7,不需要安装与配置,只需通过网线连接智能化终端与电脑,便可实现研发、下载与调试,使用十分便捷[8]。
5 CAN总线化工机械智能化终端平台实践分析
当前以CAN总线化工机械智能化终端平台为载体,已经衍生了许多各式各样的产品形态,且实现了在混凝土泵车健康监控系统与智能化臂架控制系统等产品中的广泛应用。在混凝土泵车健康监控系统中,设计研发了以CAN总线化工机械智能化终端平台为基础的物联网关,网关现场进行控制器CAN数据采集,并加以解析,以获得健康检测结果,传输于App呈现。同时储存并统计的工作数据,可基于App查询与统计,并传输检测结果于近场App以呈现化工机械健康与运行状况,具体如图9所示。

图9 混凝土泵车实际应用
而于智能化臂架控制系统中,基于CAN总线化工机械智能化终端平台设计研发了臂架求解器,其功能是负责计算泵车臂架控制系统,以臂架姿态在线求解与逆求解获得控制结果,并传输于控制器,以实现臂架轨迹高度精确化控制。
6 总结
综上所述,本文设计实现了CAN总线化工机械智能化终端平台,简单介绍了分布式电液控制系统方案,分析了CAN总线主站电路与从站电路,在此基础上设计了化工机械智能化终端平台,并详细设计了终端软件与硬件平台,进行了终端平台二次开发,最后通过混凝土泵车中的实践应用验证了终端平台实用性。结果表明,此智能化终端可为电液控制系统提供更全面联接、更完善感知、更高层次计算、更好记忆能力,可帮助主机实现无感智能化升级,实用性、可靠性、稳定性良好,值得大力推广与广泛应用。
