SCARA机器人和图像处理实验教学平台设计
2021-11-01武江博李东洁李佳钰孙明晓
尤 波, 武江博, 李东洁, 李佳钰, 孙明晓
(1.哈尔滨理工大学自动化学院,哈尔滨 150080;2.黑龙江省复杂智能系统与集成重点实验室,哈尔滨 150080)
0 引 言
随着“中国制造2025”战略的发展,培养科学基础厚、工程能力强、综合素质高的工程科技人才,对建设制造强国和创新型国家具有重要意义[1]。
机器人和图像处理技术是智能制造的关键技术,为推进新工科建设,满足人才培养的要求,提高自动化专业人才培养质量,结合学校特色,本文搭建了SCARA四轴机械臂教学实验平台。为专业基础知识的实践提供平台支撑,针对图像处理和机械臂控制等内容进行全面训练。通过该实验平台的实践,提高学生的实践能力和综合应用知识能力,激发学生的学习兴趣,提高学生的动手操作能力,有利于培养学生的工程实践能力和创新能力[2-5]。
1 总体设计方案
1.1 实验系统组成
如图1 所示,实验硬件平台主要由四部分组成,机器人视觉系统,SCARA四轴机器人,数字震动送料器,待装配的保险片、保险盒和工作台。机器人视觉系统主要是通过设计高效的图像检测算法,完成实时、准确的保险片检测;数字上料系统是自动送料模块,提高自动化工作效率;可编程控制机械臂,实现自动化的保险片插接任务。
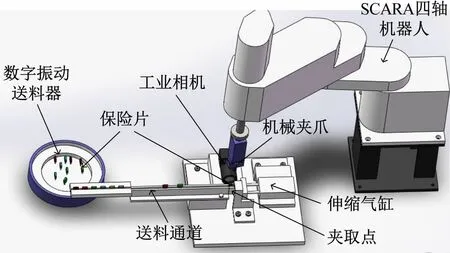
图1 插接机器人结构图
1.2 系统工作流程
如图2 所示,首先震动送料器通过送料通道,把保险片传送到夹取点,然后工业摄像头采集保险片图像,通过网络协议传送到电脑,使用VS2015 +Opencv3.0软件环境,对采集的图像进行检测,识别出保险片类别,最后通过机器人编程软件,根据保险片类别和示教学习的坐标位置信息,编程精准控制机械臂,进行保险片夹取,并将保险片插接到保险盒的正确位置,实现自动化插接任务。
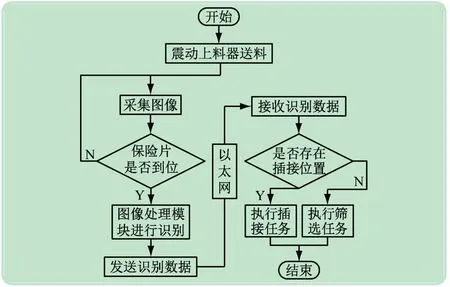
图2 系统工作流程图
2 机械臂的运动控制
2.1 机械臂D-H表示法
机械臂代替人工已经应用在很多领域,并且不同功能的机器人结构不同,本文介绍的SCARA 四轴教学机器人有3 个旋转关节和1 个移动关节(见图3)。
使用D-H[6-7]法建模,各轴分别使用右手定则建立坐标系。根据D-H 表示法,结合SCARA 四轴机器人的模型,得到实验平台的D-H参数如表1 所示。

表1 SCARA机器人模型的D-H参数
因为机器臂硬件结构固定,各硬件参数和连接杆长度参数都是已知,因此,求末端执行器相对于参考坐标系的位置和姿态,可根据D-H 参数表中的数据,将位姿矩阵相乘就得到末端执行器的位置和姿态运动学方程:

式中:

s θi为sin θi;c θi为cos θi。
2.2 机械臂编程
SCARA四轴机器人使用的是RCX Studio 编程环境,采用类BASIC的编程语言(见表2)。
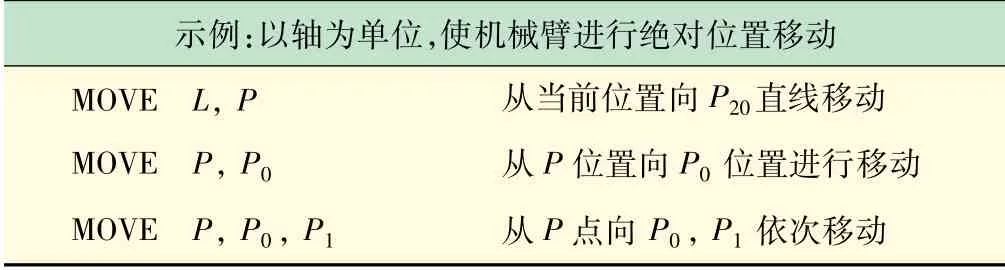
表2 移动指令示例
根据D-H 表示方法得到参数表,结合编程手册,通过控制每个转轴的旋转角度和移动,就可以对机器人编程,实现保险片的自动插接。机器人路径规划是通过示教模式,在人为操作下规划合理的轨迹,并且记录运动中的关键点位坐标如表3 所示,然后编程控制电机运动,完成自动插接任务。
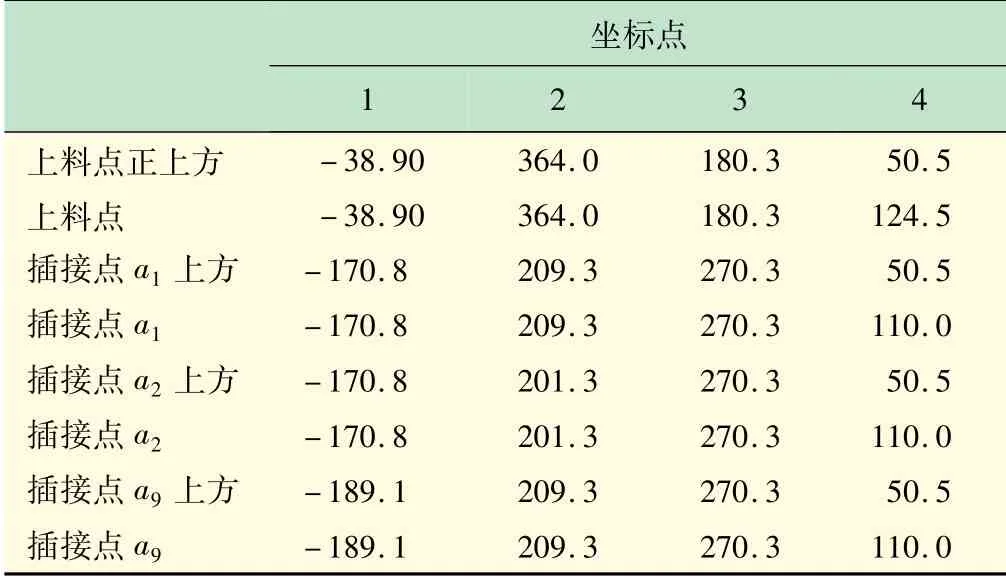
表3 4 个转轴在关键点位下的坐标
机械臂抓取程序主要分3 部分构成:
(1)判定何时执行抓取程序。摄像头获取图像信息,图像处理模块检测是否有保险片,保险片颜色是否合格,然后电脑发送信号控制机械臂移动,开始执行抓取操作。
(2)抓取工件。机器臂在示教模式下,通过人为操作学习工件的坐标信息,合理进行路径规划,然后编程控制机械臂到达抓取点上方安全点位,控制夹爪夹取保险片。
(3)插接工件。按照实际实验环境,规划机械臂运动路线,根据示教学习时记录的坐标信息,控制机械臂将保险片按一定的顺序插入保险盒中。
保险片具体插接流程如图4 所示,根据示教模式记录的关键点坐标,通过在程序中使用坐标的编号指定坐标值,控制机器人的机械臂进行移动,最后完成插接任务,结果如图5(b)所示。
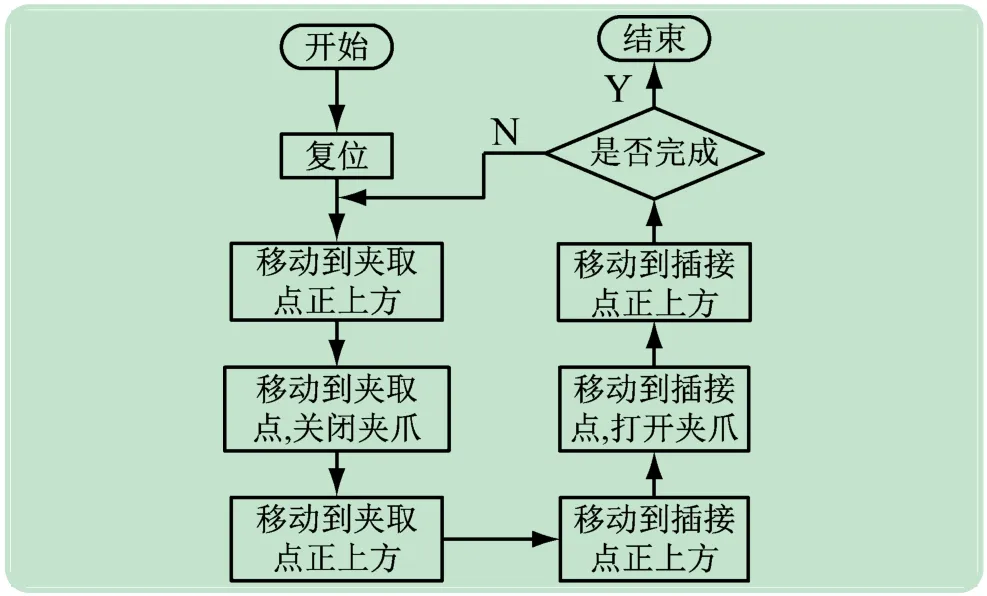
图4 插接流程图
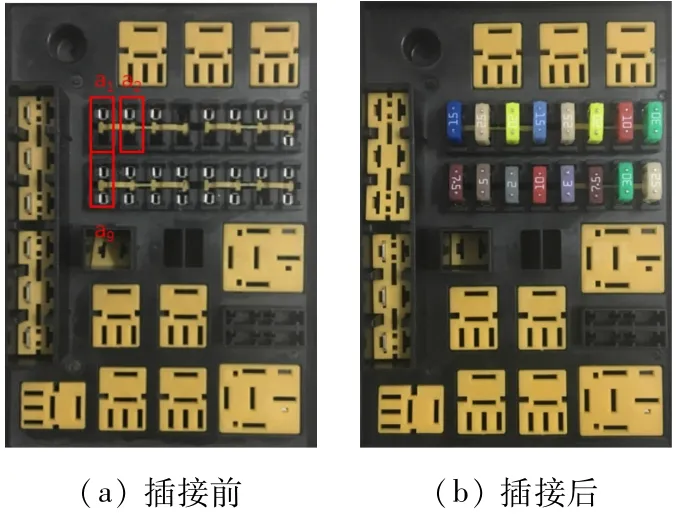
图5 汽车保险盒
3 基于机器视觉的保险片定位与识别
视觉检测是机器人技术的重要部分[8]。通过设计高效的图像检测算法,完成实时、准确的保险片检测,对确保保险片插入正确的位置非常关键。
3.1 光源模块
机器视觉模块如图6 所示。在图像处理部分,光照环境至关重要,因此本文对光源模块进行了单独的设计[9]。因实验平台是金属材料容易反光,为减少背景和环境光线对检测的影响,使用遮光罩,同时调整光源的光照角度和亮度,减少光照给图像带来的额外噪声。
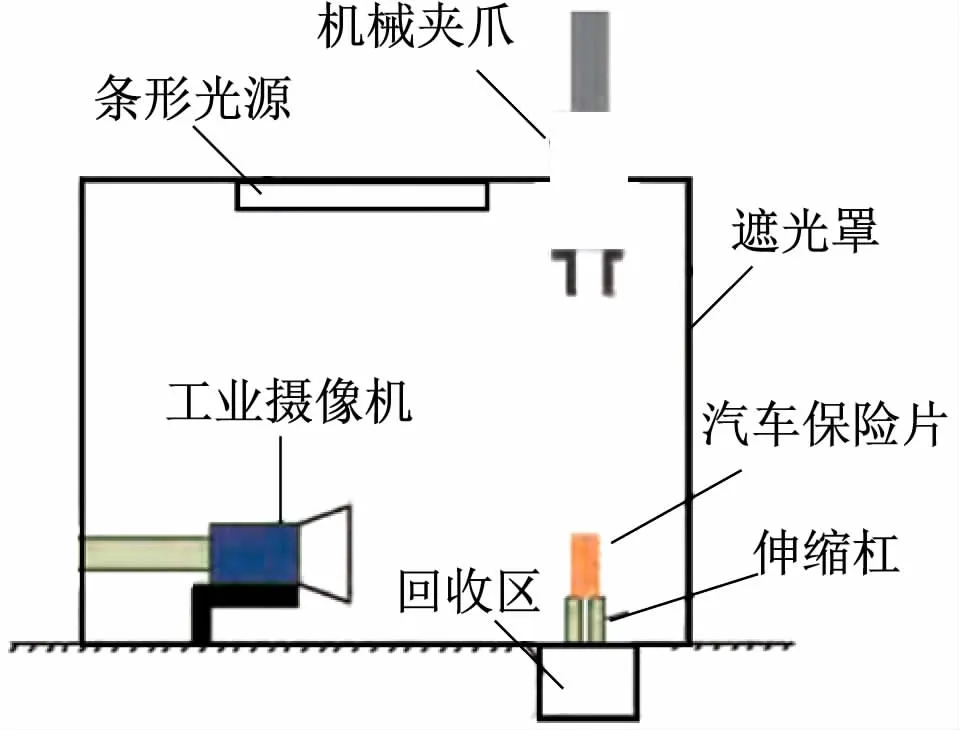
图6 机器视觉模块
3.2 图像预处理
图像预处理流程如图7 所示。待测的保险片颜色不同,其他特征基本相同[10],为了准确识别保险片种类,首先要把待测保险片从图片中分离出来。
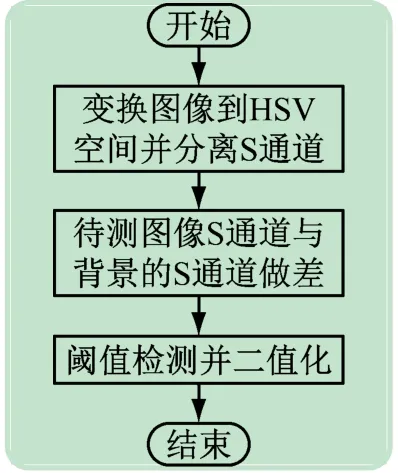
图7 图像预处理流程图
先采集没有保险片的工作台照片作为背景,然后将待测的有保险片的照片与背景照片从GRB 色彩空间变换到HSV色彩空间,见图8(b),分离出S(色度)通道,将待测的照片与背景的照片做差,通过设置合理阈值去除干扰信息,最后进行二值化处理得到如图8(d)的图像。

图8 原始图像和预处理后图像
3.3 保险片检测
经过预处理[11]得到保险片的二值化图像,然后使用边缘检测算法,通过检测保险片的边缘信息来提取保险片的位置信息。
在对比分析了Canny 等[12-14]几种不同边缘检测算法的结果后,发现Canny 边缘检测算法能够有效提取出待测图片中的实际边缘,错误识别图片边缘信息的概率和丢失真实边缘信息的概率更小。
最后使用Canny 算子进行边缘提取,流程见图9(c),得到保险片的轮廓信息见图9(a),然后再根据轮廓信息找出定位保险片的外接矩形,见图9(b),这样就可以得到保险片的像素坐标。

图9 Canny算法流程和处理结果
3.4 保险片识别
经过处理后,已经准确将保险片分割出来,并找到最外层轮廓信息,基于此设计直方图模板匹配算法进行保险片识别,见图10。
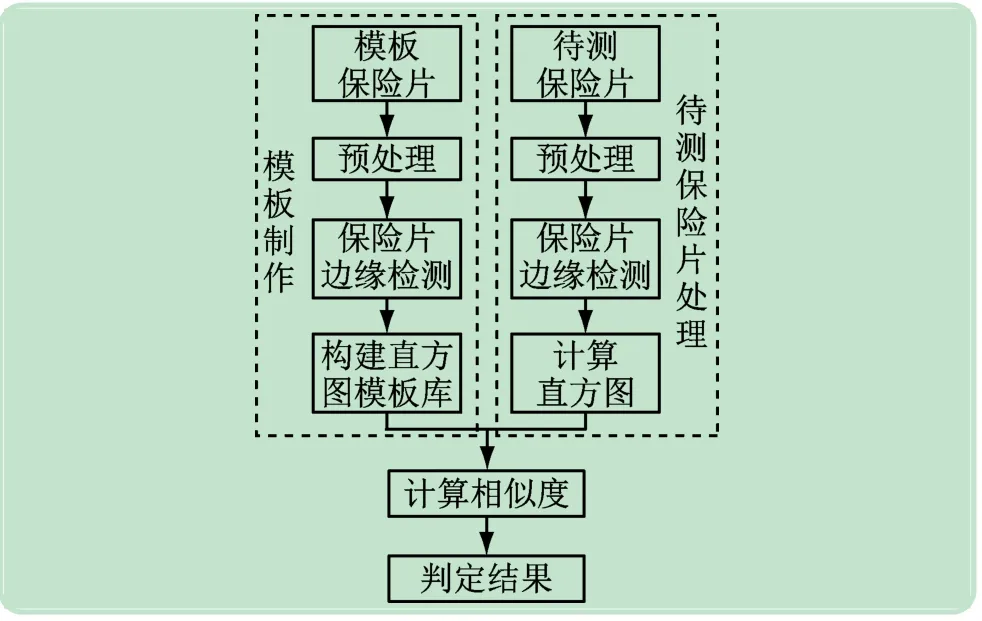
图10 模板匹配原理
直方图模板匹配算法主要分为两步,①制作标准的直方图模板数据库;②标准直方图模板与待测图片的直方图结果进行对比,计算相似度,进而对图像进行识别[15-16]。使用Opencv的直方图比较函数,计算待测保险片与模板的相关性,实现对保险片的识别与分类。
为提高标准模板可靠性,对不同保险片在相同环境下进行多次采样,计算保险片直方图均值,把计算结果作为标准数据库信息存储。最后计算待测保险片直方图与直方图模板库数据的相似度,通过设置合理阈值来判断出不同保险片的类别。
4 结 语
SCARA四轴机器人实验教学平台是推进“新工科”建设,为未来提供智力和人才支撑的重要教学平台。经过实验测试,该平台有较高的运行速度和准确率,可以满足教学实验,并且该平台支持二次开发,可以满足学生对不同方法的探索,有利于培养学生综合知识的应用能力,提高发现问题、分析和解决实际问题的能力。SCARA机器人实验教学平台,通过让同学们学习控制机械臂,设计图像处理算法,实现汽车保险片的智能插接,使学生能够通过实验更好的理解图像处理和机械臂的控制,激发学生对机器人学习的兴趣,有利于培养学生的工程实践能力和创新能力,满足国家应对新科技变革人才培养的要求。
