基于GIS的深空探测器真空热环境模拟测试系统设计
2021-11-01李君
李 君
(1.浙江长征职业技术学院 智能技术学院,杭州 310000; 2.浙江工业大学 计算机科学与技术学院,杭州 310000)
0 引言
随着全球各大国深空探测活动的深入,探测范围已扩张到距离地球更远的土星,在探测器进行探测过程中,所处的环境复杂多变,对人类的热控系统研究提出了更高的要求[1-3]。深空探测的主引力场已脱离地球,目前我国主要以月球和火星微深空探测对象,展开绕月探测、火星探测及空间探测等研究[4-5]。为了提升探测器对于深空环境适应能力,需要保证在真空状态内,深空探测器能够利用辐射完成与深空环境之间的热交换,这样极易导致探测器本身热量累积过高导致其中断工作[6-7]。
面对日益棘手的问题,很多专家展开了探测器相关的空间模拟研究,韩啸等人基于参数化设计研究的空间环境模拟器集成设计,在空间环境模拟器模拟的实际需求基础上,根据容器、热沉等子系统的特点结合数字化设计平台,对所有子系统进行相互协同的设计,实现空间模拟的设计目的[8];丘丙林等人根据地面标定设计探测分析器系统,根据空间等离子体环境,利用真空室内部要求需求对其进行实时监控设置,结合粒子束流衰减等系统实现功能齐全的模拟系统[9]。
虽然上述方法都能有效模拟出真空环境,但是对于要求更高的真空热环境,系统需要进一步升华,对此,本文设计了基于GIS的深空探测器真空热环境模拟测试系统,满足对月球进行探测的热环境测试要求。GIS是一种特定的地理信息系统,能够针对环境进行相关属性、空间及缺陷等数据的监测,实现可视化环境分析。由于月球表面最高温和最低温之间存在着310 ℃的温差,系统在真空系统中的热沉和红外加热笼部分进行了更优化的设计,并且通过实验证明,该系统具备良好运行的能力。
1 基于GIS的深空探测器真空热环境模拟系统硬件结构
1.1 深空探测器真空热环境模拟系统组成
深空探测器真空热环境测试系统主要由基于GIS的环境监测系统、真空容器、真空抽气系统、外热流模拟系统及一些辅助系统构成,深空探测器真空热环境测试系统如图1所示。

图1 模拟系统结构示意图
如图1所示,深空探测器真空热环境模拟系统由远程监控站对深空环境进行监测,并将监测数据传输至本地测控层,由外热流系统及控制系统实现对卫星及辐照环境的模拟,通过真空容器设计GIS环境监测系统、真空抽气系统及外热流模拟系统,实现对深空探测器真空热环境的模拟。以下分别对各系统进行详细介绍。
1.2 真空抽气系统
通过高真空抽气、真空度测量及粗抽3个子系统构建成真空抽气系统,为了确保旋片泵中的油蒸汽不发生返流现象,在粗抽管路中利用由罗茨泵和大抽速旋片泵组成的机组进行液氮冷阱的设置,其中2台主抽泵为低温泵,抽速为30×103L/s;过渡泵为分子泵,同时具备检漏作用,泵组与各组件之间采用高真空启动阀门进行相互之间的连接,用以切断或接通真空抽气系统的抽气过程[10]。该系统原理如图2所示。
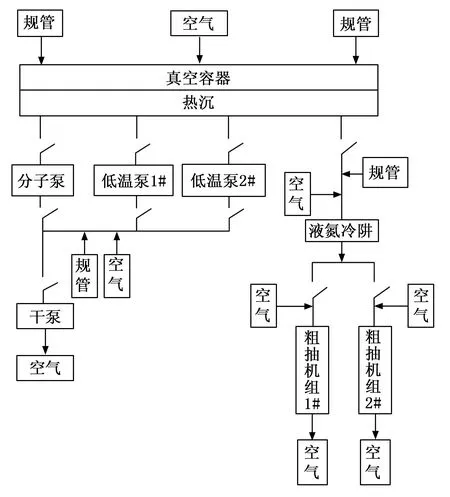
图2 真空抽气系统原理示意图
1.3 基于GIS的环境监测系统
GIS系统的主要功能是针对环境监测到的属性、空间、缺陷等数据空间特征的分析和展示,以及电子地图平台的操控。分3个步骤完成GIS系统的设计:
1)利用MapInfo设计工具对空间数据库进行设计,在VB系统中嵌入GIS控件MapX;
2)确定关系数据库和属性数据库的软件;
3)传感器与终端之间利用MSComm进行数据通信[11]。GIS环境监测系统功能结构如图3所示。
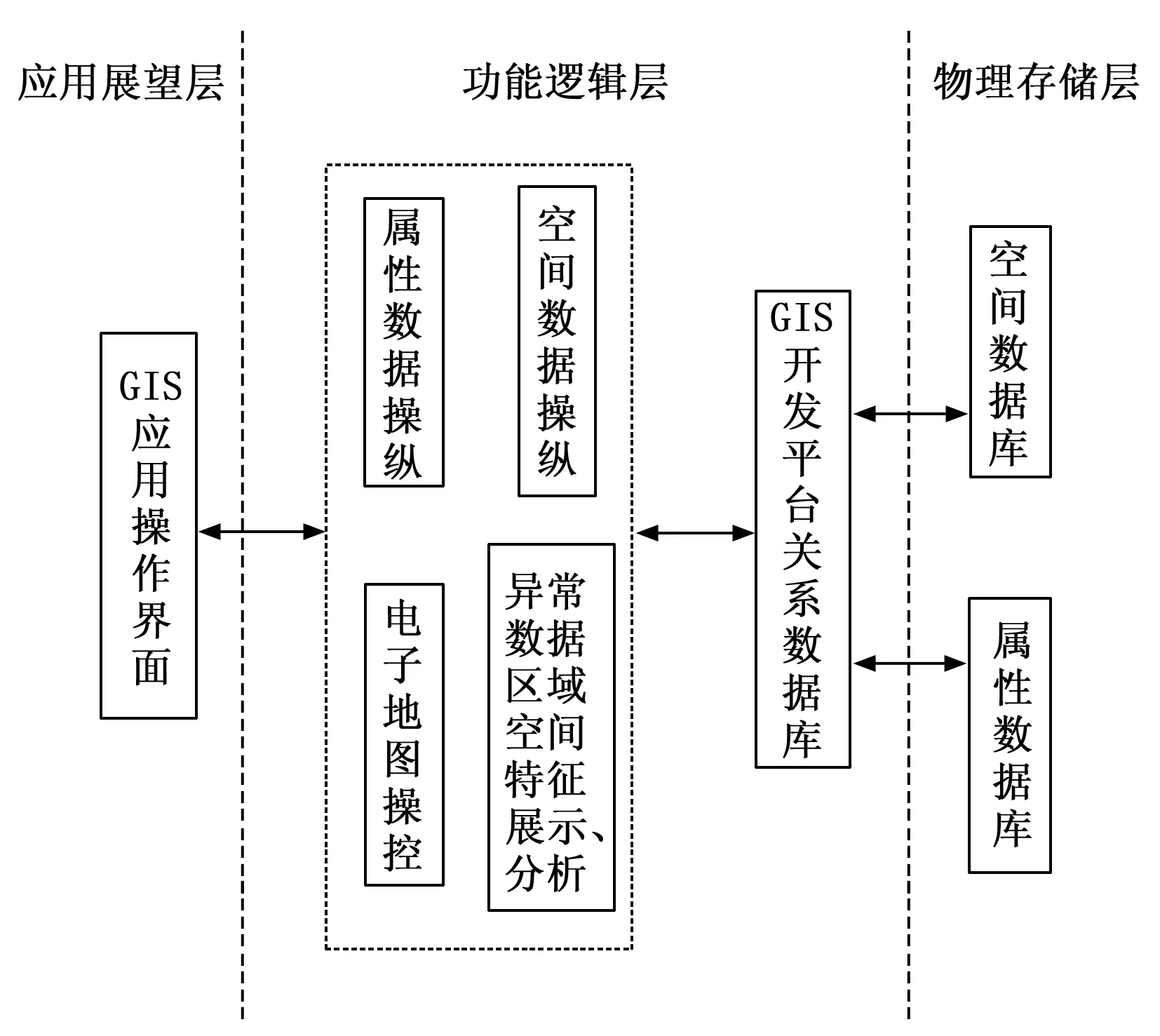
图3 GIS环境监测系统功能结构示意图
1.4 外热流模拟系统
外热流模拟系统的作用是对卫星和辐照环境进行模拟。该系统的主要构件分别为加热笼、数据采集组件、电源、控制系统等[12]。预设温度与热流计显示温度通过数据采集卡进行相互比较,然后针对电源的输出功率通过单神经自适应PID控制算法展开实时控制,最后将加热笼中的辐照热流密度进行调控,满足温度闭环控制的需求。
根据测试需求,定制的加热笼加热方式为红外加热,对于加热区的温度控制精度具有较高的要求,同时防辐射屏采用不锈钢遮挡板,该遮挡板需要进行镜面抛光处理[13]。
2 基于GIS的深空探测器真空热环境模拟系统软件设计
在硬件结构框架的基础上,设计深空探测器真空热环境模拟系统的软件流程。引入单神经自适应PID控制算法,控制红外加热笼的温度变化,将温控数据传输至远程监控站,联合真空抽气系统、基于GIS的环境监测系统及外热流模拟系统实现探测器真空热环境模拟系统设计。
2.1 单神经自适应PID控制算法
在深空探测器真空热环境模拟测试系统中,对真空热环境的模拟是研究重点。选择红外加热笼作为加热手段模拟真空热环境,引入单神经自适应PID控制算法控制红外加热笼的温度变化。
单神经元的功率输入信号分别设置为X1(k)、X2(k)和X3(k),则功率输入信号与误差信号关系为:
X1(k)=e(k)
X2(k)=e(k)-e(k-1)
(1)
X3(k)=e(k)-2e(k-1)+e(k-2)
其中:e(k)表示误差信号。
利用关联搜索生成神经元的控制信号,即:
uc(k)=uc(k-1)+Δuc(k)
(2)
(3)
其中:K为系数,用于表示神经元的比例,且大于零,wi(k)和xi(k)为相互之间呈对应关系的加权系数。
在PID控制过程中通过对3个加权系数的调整[14-15],促使红外加热笼控制温度随着环境的变化而自适应的调整,修正权值的公式为:
wi(k+1)=(1-C)wi(k)+ηe(k)uc(k)xi(k)
(4)
其中:C表示常数,取值区间为[0,1],但在实际应用中通常取值为0,η表示学习步长,且大于零。
根据式(4)可得:
Δwi(k)=wi(k+1)-wi(k)=
(5)
若wi(k)有函数对其进行偏微分的求解,则:
(6)
将公式(6)代入公式(5)中,则:
(7)
其中:函数fi(·)与加权系数wi(k)呈相对应关系,加权系数通过函数负梯度方向展开搜索修正,根据随机逼近原理[16-18]显示,当常数C无限小的时候,加权系数则能收敛到一个相对稳定的值,且保证与预期值相差很小,保持在允许误差范围之内[19-20]。
采用规范化处理式(1)~(4),依次确保算法具备更好的收敛性和鲁棒性,处理公式为:
(8)
(9)
w1(k+1)=w1(k)+ηIe(k)uc(k)x1(k)
w2(k+1)=w2(k)+ηPe(k)uc(k)x2(k)
(10)
w3(k+1)=w3(k)+ηDe(k)uc(k)x3(k)
其中:ηI表示加权系数对应的比例系数学习速率,ηP表示积分系数学习速率,ηD表示微分系数学习速率。根据式(10)调节PID参数,实现温度随环境的变化而自适应调整。
2.2 深空探测器真空热环境模拟流程
根据单神经自适应PID控制算法实现对红外加热笼的温度变化的控制,将控制输出值与硬件结构相连接,共同实现对深空探测器真空热环境的模拟,其流程如图4所示。
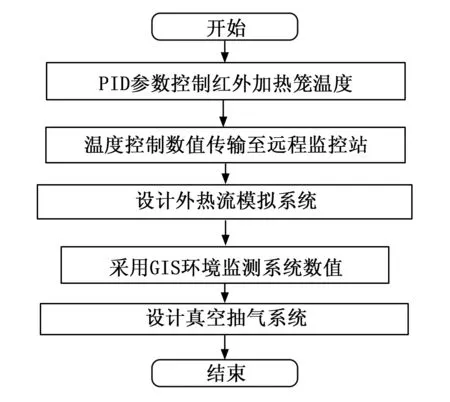
图4 异常数据分析试验结果对比示意图
如图4所示,通过PID算法确定加热笼的温度变化并对其进行控制,将数据传输至远程监控站模拟深空探测器真空热环境,根据GIS技术对深空探测器真空热环境进行模拟,通过真空抽气系统实现对真空环境的模拟。据此,实现基于GIS的深空探测器真空热环境模拟测试系统设计。
3 试验结果与分析
以模拟的深空探测真空热环境系统为试验对象,热沉加工合格率最重要的指标为漏检率,利用氦质谱检漏仪针对系统的热沉系统的机械泵机组进行检漏试验,采用喷吹法检验焊缝漏率,氦罩法检验总漏率。试验参数如表1所示。

表1 试验参数
在表1所示的试验参数下进行深空探测器真空热环境模拟测试,流程如图5所示。

图5 深空探测器真空热环境模拟测试流程图
为确保真空热环境的可靠性,共设计了6组机械泵机组,通过漏检率试验选取最优机组作为真空系统结构部分,试验结果如图6所示。
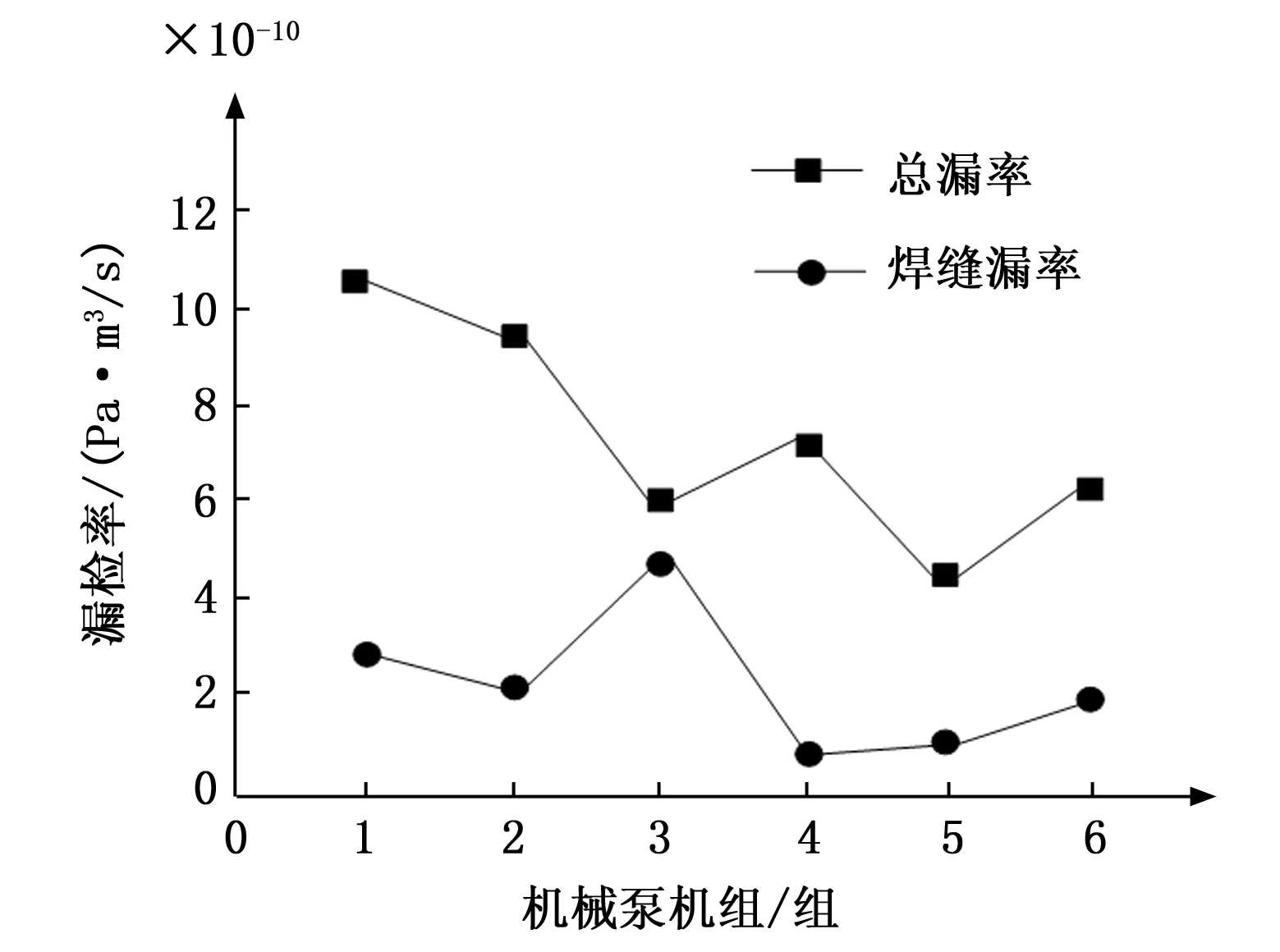
图6 机械泵机组漏率结果示意图
由图6可知,设计的6组机械泵机组,焊缝漏率最低的为4号机组,总漏率最低的为5号机组,从综合角度考量,5号机组为最优机组,焊缝漏率和总漏率分别为0.78×10-10Pa·m3/s和4.82×10-10Pa·m3/s,漏率值在真空试验设备的标准之内,故整体系统采用5号泵组为系统组成部分。
采用复合真空机和真空规进行真空抽气试验,真空度测量值在105~10-6Pa范围内,采用载荷条件下展开试验,试验结果如图7所示。

图7 真空度变化示意图
液氮输入真空容器辅助子系统热沉内部静置12小时后,热沉内部真空度值为3.3×10-5Pa,该结果与设计目标值相比高出一个数量级,表明真空抽气系统具备良好抽气效果。
在不同温度工作状态下进行加热笼的辐照热流密度试验,试验结果如图8所示。

图8 辐照热流密度试验结果示意图
由图8可知,当工作状态处于1 800 ℃的极高温度时,红外加热笼中各加热区的辐照热流密度平均为586 W/m2,当低于100 ℃的极低温度时,加热区的辐照热流密度平均仅为27 W/m2,该结果完全满足设计需求。
各支管内的液氮流量分布直接影响着整体的制冷性能及各子系统温度的均匀性,而影响液氮流量是否能够分布均匀的关键因素为支管之间的距离和支管自身尺寸,支管距离对液氮流量的影响如图9所示。

图9 支管流速分布分析示意图
图9中的距离是指各支管与主管之间的间距,从分布结果可以看出,所有支管的流速均保持在0.26~0.40 m/s之内,与主管之间的间距越小则支管流速越大,液氮流量分布不均会导致系统制冷能力下降。为此降低各支管与主管之间的间距,本系统将热沉管路中各支管之间的距离设为0.15 m,采用静压分布和流量分布的方式进行真空系统中的液氮流量流动分布均匀性的试验,试验结果如图10所示。

图10 支管流速分布结果示意图
由图10可知,采用本系统的支管配置后,各支管的流速均保持在0.356~0.374 m/s以内,所有支管液氮流量分布较均匀,表明该设计方式能够有效提高系统的制冷能力,保证各子系统的温度均衡,间接提升系统的可靠性和有效性。
采用本文系统和文献[8]基于参数化设计的空间环境模拟器系统和文献[9]离子探测分析器地面标定系统进行异常数据的检测率和误报率的对比试验,试验结果如图11所示。

图11 异常数据分析试验结果对比示意图
由图11可知,本文系统的异常数据分析效果相对最好,平均检测率为98.73%,比文献[8]系统和文献[9]系统的平均检测率分别高1.41%和2.87%;本文系统误报率为0.18%,比文献[8]系统和文献[9]系统的平均误报率分别低1.41%和2.87%;表明本文基于GIS的深空探测器真空热环境模拟测试系统在监测过程中,具备较好的异常数据监测能力,能够有效提升系统的有效性。
由于本文系统应用GIS 对深空探测器真空热环境进行监测,并优化设计了真空系统中的热沉和红外加热笼部分,并一一优化设计了环境监测系统、真空容器、真空抽气系统、外热流模拟系统及一些辅助系统,因此对深空探测器真空热环境的模拟测试较为准确。
4 结束语
基于GIS构建的深孔探测器真空热环境模拟测试系统,可解决大热流对真空容器系统中的热沉子系统产生的温度和流量分布不均等问题,设计中对其采取了结构优化策略,采用提升红外加热笼的温度控制能力的方法,并结合地理信息系统GIS,实现对模拟深空热环境的实时检测和分析,该真空热环境模拟测试系统的各项指标均满足设计要求。
