城市道路非机动车骑行品质评价:一种自然骑行实验方法
2021-10-29王诗菡周诗旖
倪 颖,王诗菡,周诗旖
(同济大学道路与交通工程教育部重点实验室,上海201804)
引 言
自行车作为一种可持续的交通模式,与机动化交通相比具有独特的优势,不仅可以减少污染物排放,缓解交通拥堵,实现门到门的连续性出行[1-2],还有利于促进健康积极的生活方式[3-4],在世界各地均受到鼓励。然而,除了自行车由于其固有的质量差异和直接暴露使骑行者容易受到伤害,对外界环境品质异常敏感外[5-6],大多数现有的道路环境往往以机动车为主导进行规划和设计,忽视了自行车出行的利益[7],导致骑行环境存在安全隐患,舒适性有待提高。因而,需要建立科学、合理、全面、可操作的自行车骑行品质评价体系,为设施规划设计、运行管理提供有力依据。
国内外文献中对于自行车交通服务品质的研究主要包括两类:基于交通设施特征的评价,以及基于自然骑行实验获取的骑行行为特征的评价。在早期的研究中,许多评价模型是基于基础设施和交通流特征开发的。例如,自行车安全指数评级(BSIR)模型[8]、自行车服务水平(BLOS)模型[9-12]、自行车适宜性评分模型[13]、自行车兼容性指数(BCI)模型[14],其中最常用的衡量标准是BLOS,这也是HCM[15]中提出的。这里模型所采用的特征参数往往包括车道宽度、自行车与车辆的分离形式、交通流状况等,这些因素被证明对自行车骑行品质有显著影响,但其数据的收集方式耗时费力,主要为三大类:骑行者拦截调查、实地调研及视频调研。导致能获取的数据样本有限,数据内容质量及范围也很有限,且缺乏骑行行为等较客观的影响因素。近年来,随着机动车自然驾驶实验的发展,该方法已成为当下提高机动车安全流行的工具,且借鉴转移到对自行车的研究中。研究人员通过设计实验车,进行自然骑行实验来收集骑行行为数据,如速度、加速度、转向角等来评估骑行品质[1,16-17]。实验车上可以配备视频摄像头和一些传感器,如GPS接收器、速度传感器、加速度计、陀螺仪传感器、磁力计和压力制动传感器等[16,18-19]。这种方法可得到大量全面的动态骑行数据,具有一定的客观性,可弥补传统方法中仅基于设施类要素特征评价研究的不足,补充对骑行品质有重要影响但缺失的影响因素,为骑行品质相关研究带来新的思路和方法。已有研究综合利用行为与环境数据进行骑行品质评价,但在评价指标方面并不完善,设施方面考虑的因素较少,仅有机非分隔形式、人非分隔形式[20],以及路面的质量[17];而骑行行为特征方面,现有研究大多数仅仅分析行为的统计学指标,如加速度的平均值,标准差等,无法全面地衡量骑行品质。
基于上述分析与研究缺陷,本文提出了更为完整的骑行品质评价体系,基于自然骑行实验收集交通设施类和骑行行为参数,建立了科学全面的城市道路骑行品质评价模型。
1 实验数据采集及处理
1.1 实验车设计
本研究的自然实验车设计如图1所示,竖杆靠左把手处竖直安装运动摄像头GoPro Hero3+,能够拍摄骑行前方实况,辅助数据分析及验证实验有效性。靠左把手处水平安装9轴姿态角度传感器,可采集三维方向的加速度、角速度及角度,并设置采集速率为10 Hz,即0.1 s回传一次数据,能有效获取自行车骑行特征。正前方骑行方向为y轴方向,垂直方向为z轴方向,右横向为x轴方向,三维坐标系如图1所示。
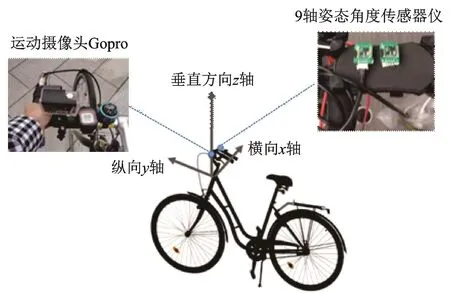
图1 实验车设计与其对应坐标系
1.2 自然骑行实验
为收集数据,本研究展开了自然骑行实验。通过路网调查,以涵盖多种路段为原则,选定实验地点如下图2所示,包含18条路段,组织20名志愿者(10男10女)在2018年11月26日至11月28日的8:30-10:30及15:30-17:30进行骑行实验,调查时间段内均为晴天。

图2 自然骑行实验范围
实验过程中,GoPro Hero3+收集骑行者前方的环境信息,并记录研究路段的设施类特征作为评估指标,包括机非分隔类型、人非分隔类型、路边停车情况、公交站数量、出入口数量、周边用地类型、机动车流量、非机动车流量、行人流量。路段的断面类型包含了常见的三大类:机非物理分隔、机非划线分隔和机非混行,另外,周边环境要素和交通流要素均有显著的差异性,其中机动车流量(veh/h)含有三个等级:低[0,360)、中[360,600)、高(600以上);非机动车流量含有三个等级:低[0,320)、中[320,620)、高(620以上);行人流量也含有三个等级:低[0,200)、中[200,400)、高(400以上)。上述流量的低中高的划分方法参考文献[7]。
此外,传感器每0.1 s采集一次三维方向的加速度、角速度及角度。骑行者在完成一个路段时,会停止骑车并对该路段的骑行品质感受进行打分(对应评分1-5分,分别表示非常不满意、不满意、一般满意、满意及非常满意)。共获得364个样本,一位骑行者在一个路段上骑行一次算作一个样本。在去除无效的传感器数据后,最终的有效样本为342个。
1.3 骑行行为参数提取
为了有效分析骑行行为特征,本文综合提取了反映横向稳定性、纵向稳定性以及垂直方向颠簸程度的行为参数。
1.3.1 横向稳定性
根据对视频的观察,认为当实验者在骑行过程中为躲避其他障碍物而摆动车头,且两者之间的距离小于1 m时,存在横向规避行为。通过对回避骑行和稳定骑行数据的分析可知,z轴角度的变化能直接反映及描述避让行为的过程。本文提出横向稳定性失衡时间及失衡程度两个行为指标。
横向稳定性的失衡时间基于z轴角度的变化衡量,根据z-score标准化算法的公式进行判断,该算法多应用于数据极值及趋势的识别,公式如下

式中θz为z轴角度;σ为z轴角度的标准差。结合实验效果及意义,z≥2或≤-2时,即判断为处于横向稳定性失衡过程中。统计符合上述要求的θz的个数以表示横向稳定性的失衡时间N z。
对于横向稳定性的失衡程度,可使用z轴角速度的均方根表示,公式如下

式中ωzt为t时刻z轴角速度;T为统计样本的时间长度。
1.3.2 纵向稳定性
纵向安全通常与突然加速和制动有关。通过数据分析,是否加减速与y轴加速度有明显的相关性。结合实验中加减速过程的特征分析及文献研究[21],认为当a y≥0.168g时,有加速过程存在,当a y≤-0.294g时,有减速过程存在。
1.3.3 颠簸程度
骑行颠簸程度一定程度上能反应骑行的舒适性与安全性,对骑行品质有重要的影响。根据文献及理论分析[22],骑行颠簸程度能通过竖直方向的加速度反应。
考虑到当z轴加速度为1g时,自行车将处于静止的垂直状态,因此本研究以重力加速度为参考,提出用加速度的均方根来表示整个自行车的颠簸程度,如下式所示

式中a zT代表z轴加速度的均方根,a zt为t时刻的z轴加速度,T为统计样本时间长度。根据现有文献的换算[22],当a zT≤0.1337g时,认为颠簸程度低;当a zT∈(0.1337g,0.2587g)时,认为颠簸程度中等,当a zT≥0.2583g时,认为颠簸程度高。
表1总结了本文提出的骑行行为特征参数。对数据传感器的原始数据进行处理,获取上述行为特征参数。为了后续数据处理及利于模型解释,将参数均进行归一化处理,转为无量纲参数,如下式所示

表1 骑行行为特征参数总结表

式中Xnorm为归一化后的数据,X为原始数据,Xmax和Xmin分别代表原始数据集的最大值和最小值。
2 骑行品质评价体系
2.1 关键评价指标筛选
本文基于三大交通设施类要素:断面设计要素、周边环境要素及交通流要素,结合三个维度的动态骑行行为特征:横向稳定性、纵向稳定性以及垂直向颠簸程度,共12个特征参数对路段的骑行品质进行评价。
使用有序Logit回归模型进行评价指标的筛选,得出对骑行品质有显著影响的关键评价指标。本次的有序Logit模型样本量为342,被解释变量观察值Y为志愿者对应的骑行品质评价。影响因素X即从骑行品质评价指标中进行筛选。模型一纳入设施参数及行为特征参数,模型二仅纳入设施类参数。经过多重比较,当模型中纳入横向失衡程度、横向失衡时间及减速时间参数时,各参数效果最为显著,结果如表2所示。模型一的R2相比于模型二提高约0.08,说明动态骑行特征参数的加入能够提高模型的精度。最终的评价指标位如表2所示的9大指标。

表2 有序Logit模型结果对比
在模型一的输出结果中,各个变量的系数能定性地表示各参数对骑行品质的正负面影响。总的来说,机非有物理分隔、横向稳定性失衡时间减少、自行车流量增加、减速时间减少、行人流量增加、机动车流量降低、人非有物理分隔、非商业用地及横向稳定性失衡程度减少能提高骑行品质评分,对骑行品质有正面影响。
2.2 骑行品质评价模型
上文的有序Logit模型能有效得出关键评价指标,但其预测精度有限,仅为约65%。为了提高预测精度,基于9个关键评价指标,使用随机森林模型建立骑行品质评价模型。随机森林模型的算法是一种集成算法(Ensemble Learning),该算法属于Bagging类型,其算法准确率高,且对异常值如空值和系统噪声都有较高的容忍[23]。主要包括以下几步:
1)从原始样本数据D中采样成i个样本D i。
2)假设原始样本中属性个数为a,每个样本选择a中的m个特征,利用最佳分割点方式建立决策树;
3)重复以上过程i次,产生i棵决策树;
4)对获得的分类结果采用多数投票方式确定最优分类结果。
由于可通过OOB ERROR来预测模型精度,建立模型时不需要建立测试集,所训练集的样本量为342个,设置子树数量为50时,OOB ERROR趋于稳定,约为19.5%左右。最终模型的准确率达到80.38%,评分误差基本为1分。输入参数重要性的排序如图3所示,结果表明,重要性排为前三的参数均为骑行特征参数,分别是横向失衡时间、减速时间及横向失衡程度,说明骑行特征参数的加入对骑行品质评价模型的模型精度起到非常关键的作用。此外,非机动车流量、机非分隔类型以及行人流量也是较为重要的设施类参数,在提升路段骑行品质时可着重考虑管控。
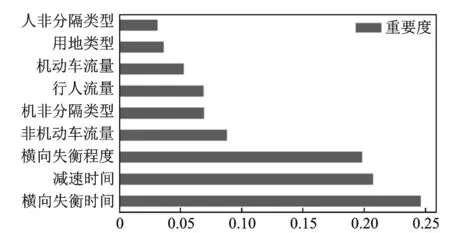
图3 输入参数的重要性度量结果
3 模型应用
本次应用首先选定评价的范围,如图4所示,位于上海市杨浦区,路网总长度约4 km。为了能获取骑行数据,邀请一名实验人员使用自然实验车沿着路段1~15进行实地骑行。通过骑行品质评价模型,输入图3中对应的9个评价指标,即可得到该条路段自行车的骑行品质,根据其得分绘制骑行品质地图,如图5所示。
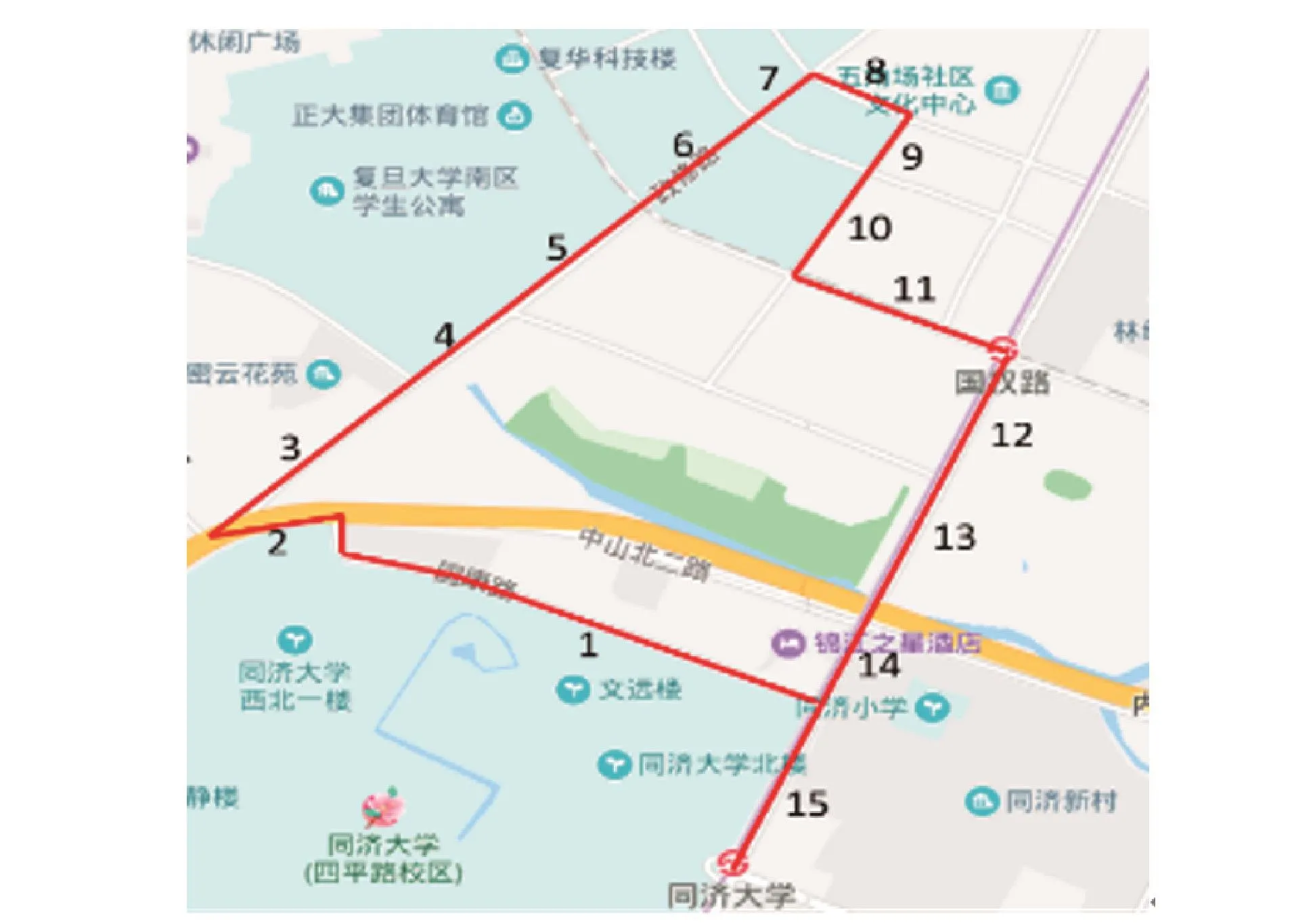
图4 模型应用试验范围

图5 骑行品质地图
4 总结与展望
本文主要研究了城市道路自行车骑行品质,将自然骑行实验运用到自然骑行评价的研究中,明确实验目标,选取合理的数据采集器,设计了符合目标的自然骑行实验车,丰富了数据收集的方法,能收集到骑行过程中客观且高质量的骑行特征数据。另外,大部分的传统研究中,评价指标集中在交通设施类数据,本研究将骑行特征指标纳入指标评价中,完善了评价的解释性,同时提高了骑行指标评价模型的精度。并且在骑行品质评价模型建立前,合理且较为客观地筛选关键评价指标,提高了预测模型的精度。以上海市杨浦区的路网为例,进行模型应用,基于骑行品质评价模型可得出各路段的分数,绘制骑行品质评价地图,从而直观得出城市道路自行车骑行品质。
模型应用阶段车载仪器为9轴姿态角度传感器,可操作性及可推广性强,在共享单车及公共自行车普及的背景下,可安装于自行车上,获取骑行特征数据,突破传统研究方法数据样本量的有限性和数据质量的局限性,能采集大量骑行特征数据,实现模型的进一步优化与应用。此外,未来可以对其他自行车交通设施(如交叉口)展开自行车骑行品质的调查,进而搭建更加完整的自行车骑行品质研究体系。
