人工智能在智慧海洋建设中的应用
2021-10-28郑婷婷
郑婷婷
(1. 中国科学院大学 人文学院, 北京 100049;2. 中国船舶集团有限公司, 北京 100097)
0 引 言
智慧海洋[1]是指将信息化与工业化相融合以建设海洋的系统工程,是信息与物理融合的海洋智能化技术革新。智慧海洋在海洋大数据的基础上,利用物联网,结合海洋云平台,利用人工智能来实现海洋战略发展中的智能化处理,利用区块链来降低成本适应海洋的发展趋势。智慧海洋的核心基础[2]是海洋综合感知网,智慧海洋的联通纽带是海洋信息通信网,智慧海洋的神经中枢是海洋大数据云平台,智慧海洋核心价值的体现是海洋信息智能化应用服务群。本文梳理国内外人工智能与海洋技术及装备平台融合的实例,探究智能技术在海洋装备上应用的发展路径,并提出加快人工智能在智慧海洋建设的几点建议。
1 国外人工智能技术在海洋中的应用
较多国家已开始人工智能技术在海洋探测方面的应用,通常这类技术应用的前沿都始于军事领域。
2007年,美国制定《海洋行动计划》,建成综合海洋观测系统,并研究信息快速挖掘方法,近年来又提出《海军海洋科学发展计划》《海洋数据获取与信息提供能力增强计划》等。在海洋智能平台方面,美国海军于2005年公布《无人潜航器主计划》,该计划也为工业部门指明发展方向。
欧洲非常重视智能化海洋探测技术的发展,欧洲海洋观测数据网(EMODnet)提出 Marine Knowledge 2020计划,加强海洋科学研究能力。英国、法国、德国制定长期发展计划,推进以水面和水下机器人为载体的海洋探测技术发展。瑞典、意大利等国也在研制用于扫雷的无人水下航行器。俄罗斯于2016年研制新型水声通信系统,实现水下智能平台、潜艇、深潜器、潜水员等水下组网通信。
2 人工智能是智慧海洋建设核心技术
当前,人工智能技术主要是为海洋资源开发利用、海洋经济发展、海洋生态环境保护和海洋权益维护提供全面透彻的信息感知、泛在随行的通信保障和精准智能的决策服务,包括海洋感知网、海洋通信网、海洋智能平台和应用群这四大板块。目前智慧海洋建设对人工智能主要有4个方面的需求:智能信息采集、智能信息传输、智能信息处理、智能信息服务。从智慧海洋信息流“数字-信息-知识-智慧”的过程来看,人工智能技术是人类从海洋中挖掘智慧的基础技术。不难看出,人工智能技术是建设智慧海洋的核心与关键。图1为智慧海洋应用场景概念图。

图1 智慧海洋应用场景概念图
海洋环境的特殊性决定了海洋智能平台尤其是水下机器人面临着严峻的功耗、通信和计算能力的挑战。具有低功耗特点的智能控制、智能感知、目标识别、协同工作、动物型潜航器和智能通信导航技术具有非常广阔的应用前景。对于普通舰船和潜艇,运用人工智能技术的智能调度系统、智能指挥系统、水下目标自动探测和识别、智能驾驶和智能水声电子对抗等将有大量的待研发课题和应用需求。
3 人工智能在智慧海洋建设中的应用实例
声音、图像识别及自动驾驶技术是目前较成熟的人工智能技术。以水下图像识别、水下立体视觉、海上障碍自主避碰为例,论述人工智能在建设智慧海洋中的应用实例。
3.1 水下图像识别技术
水下图像识别主要以声学、光学和激光为主,相对于其他传感手段(电磁波、视觉光、温度、磁性),声呐是现有监视手段中每平方米水下覆盖面积成本较低的。水下目标的声呐图像检测是一个复杂的问题,诸多因素都会对水下图像检测造成干扰,如操作和环境条件的变化、存在空间变化的杂波以及目标形状、组成和方位的变化等。此外,底部特征如珊瑚礁、沙层和植被可能会遮蔽目标或混淆检测过程。
针对自主式水下航行器侧扫声呐图像,MUKHERJEE等[3]提出一种鲁棒特征提取的符号模式分析方法,该方法基于符号动力学和自动机理论的数据驱动算法探测海底环境中的水雷和类似水雷物体。这种实时算法通过粗粒度化的数据空间将其符号化来实现,即二维声呐图像的分割。通过构造概率有限状态自动系统,从符号化图像中提取作为特征的随机矩阵形式的统计信息,设计一种二值分类器,用于将检测到的物体区分为类雷目标和非类雷目标。模式分析算法在探雷阶段产生的声呐图像上得到了验证。该算法用于有限内存商用货架平台上的实时执行,能够检测海底物体。声呐在海床上方的恒定高度处以恒定的速度沿直线轨道移动。图2为发射声呐波束的左半部,右半部与左半部相似,此处不再赘述。两侧的传感器传输近似垂直于平台运动方向的窄能量束。原始侧扫图像对应于回波强度随飞行时间变化。通过假设海底是水平的(即零梯度),从原始图像推断水平范围。图 3为声呐传播模型及海床上存在水雷的典型图像。由于假设为水平海床,来自雷状物体(出现在标记点A~B的范围内)的回波被映射到标记点A′~B′的范围内。
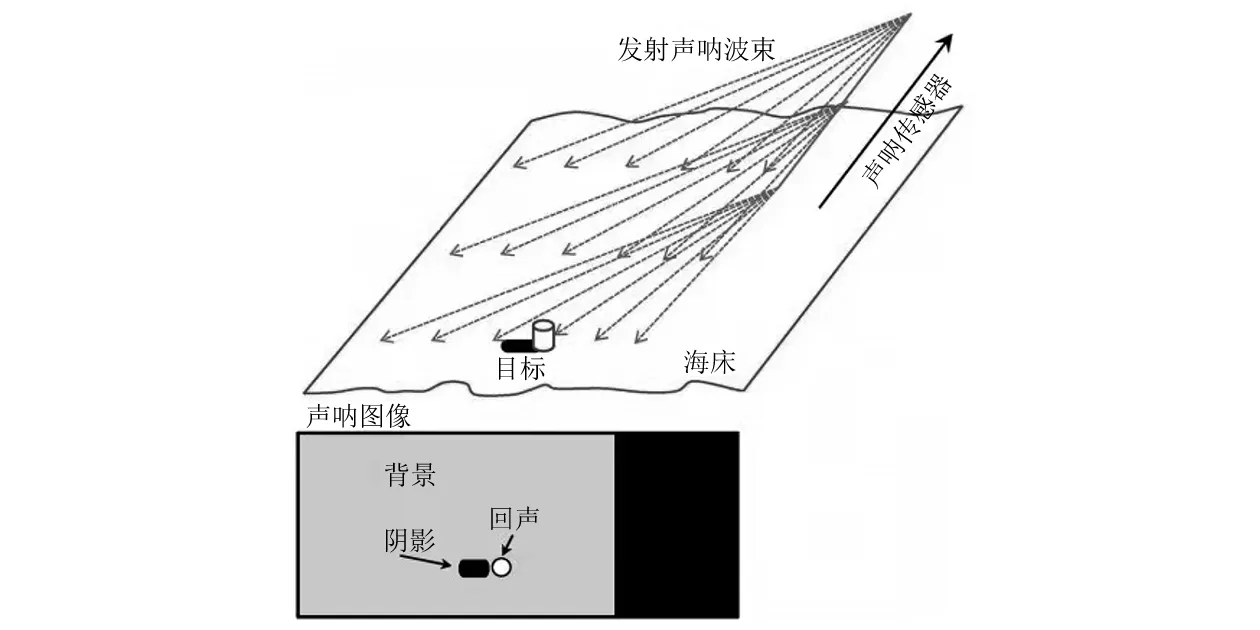
图2 典型的侧扫声呐操作原理
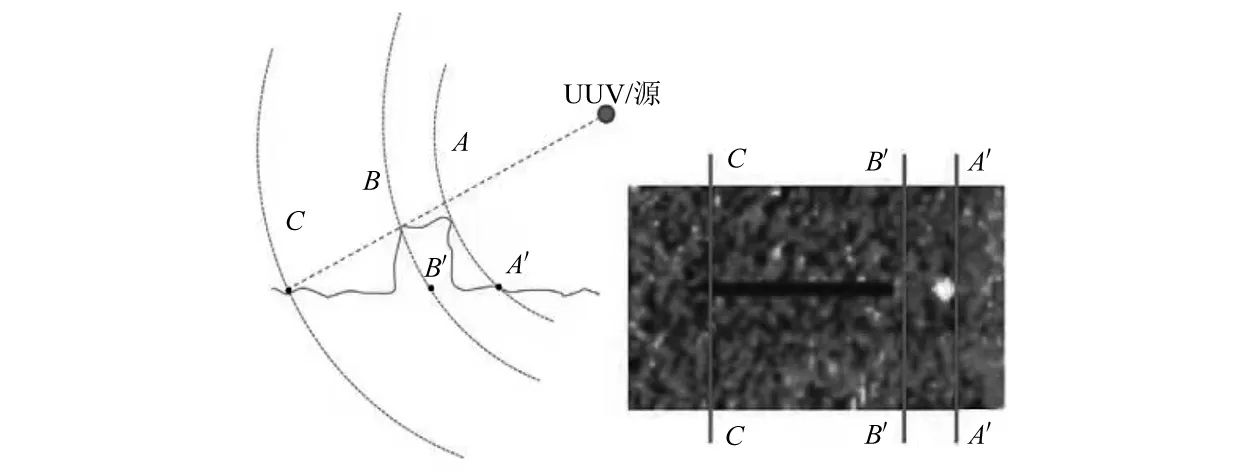
图3 声呐波路径中雷样物体的阴影形成
3.2 水下立体视觉技术
基于立体视觉系统,人眼能够估计可视化对象的深度。如果将这种能力引入机器人的设计中,可开发出基于立体视觉的观测或目标跟踪系统,配备该系统的移动摄像头机器人可在不同环境中更灵活以适应各种不同的任务。
基于立体视觉技术的应用场景或搭载系统大多基于静态相机或地面车辆上的摄像头等。优点在于技术可提供周围场景的精确三维重建,支持从图像中提取相关数据,如颜色、边缘、角落、关键特征点,并将场景中的不同物体分类。该技术已被应用于海运车辆导航及其动态环境领域。立体视觉系统可通过修改来适应许多情况,例如与海况有关的恒定运动、由太阳的位置或云的存在而导致的照明变化、眩光、反射、由雨水或其他车辆穿越而造成的部分或全部遮挡等。SINISTERRA等[4]在无人水面艇(Unmanned Surface Vehicle, USV)上基于立体视觉技术估计移动船舶的位置、速度和航向,以跟踪运动中的目标船舶。该方法包括立体视觉测距、目标检测和跟踪,以及由图像量化限制和立体像素不匹配而引起的跟踪误差的最小化。该技术包括结合简单的立体视觉匹配算法、基于扩展卡尔曼滤波器的预测-校正方法,以及使用表示目标船舶运动和立体视觉测量的适当概率模型的选择。
3.3 海上障碍自主避碰技术
USV具有不同的模块化功能及无人员伤亡特性,可在敌方危险区域担任探潜、反水雷、情报侦察监视等高危险及高难度任务。战时USV将前出舰艇编队几百公里执行上述危险任务,保障舰艇编队安全。为及时有效且隐蔽地完成任务,须确保USV自主准确到达危险任务区,其应具备自主导航控制功能。自主导航控制是指USV依靠自身携带的传感器在海上特定环境中,按时间最优、路径最短或能耗最低等要求实现从起始位置至目标位置的无碰撞运动过程。其中,海上障碍自主避碰技术[5]就是USV需要解决的自主导航控制技术之一。
USV在按照既定路径航行过程中,需通过艇载雷达、光电系统等传感器实时探测周围运动障碍物,若障碍物出现在原路径点间,需临时修改路径并生成新的路径,使USV沿新路径航行。USV自主避碰主要通过传感器探测到的障碍物与本艇相对速度大小、相对距离、相对运动方向及障碍物大小等因素来实现。速度避碰法即通过改变USV速度大小和运动方向完成避碰。其中,USV运动方向改变需满足一定的海事规则,需据此制订相关策略以确保USV航行中成功自主避碰。
4 海洋智能平台与无人装备
空中、海面、水下海洋智能平台是海洋感知网的承载实体,此类智能平台同时运用了自动驾驶、云计算、大数据、高速互(物)联网等技术,可单独或成群执行特定任务,在军事领域已有应用实例。
4.1 海上无人艇
在近海防卫作战体系中,USV承担大型舰艇编队日常外围警戒、机动巡逻查证、可疑小艇远距离拦截等任务,也可作为电子对抗、水声对抗舰外机动诱饵。USV可跟随航母编队、驱护舰编队、两栖编队行动,接受编队指挥,依托编队信息、物资、弹药、维修保障等,单艇工作和多艇联合工作,替代有人舰船执行重复性、低强度、高代价、高危险性任务。
4.2 无人潜航器
美国海军在《无人潜航器主计划》中赋予水下无人潜航器多种使命任务,即情报、监视和侦察,反水雷,反潜战,探测与识别,海洋调查、中继通信和导航网络节点,负载投送,信息战以及时敏目标打击。目前,国外已投入使用的无人潜航器主要担负海洋调查,情报、监视和侦察,反水雷等任务,而反潜战和时敏目标打击是无人潜航器未来发展的方向,也是实现起来难度相对较大的部分[6]。
无人潜航器能隐蔽地抵近敌方沿岸海域或重要海上目标,并进行长期潜伏,收集水声、电磁和光电数据。其配置的光学成像和电子设备等可在航道、港口和基地附近对水面以上舰机和岸上目标及雷达通信电子设备信号进行侦察和监视;配置的前视声呐、多波束测深声呐、侧扫声呐等成像声呐和水下电视机等可在航道、港口和基地附近对水下防潜网、水声基阵等目标实施侦察;配置的监视传感器和传感器阵列可适时部署在航道、港口和基地附近,对水下环境和目标进行监视;配置的水声测量装置功能模块可对航道、港口和基地的水下战舰、潜艇、军辅船、各种潜器等进行辐射噪声或主动声呐信号测量及海洋环境噪声数据测量。
4.3 海上无人机
海上无人机是指用于海面侦察目标指示、反潜、扫雷、通信中继等海上军事活动的无人飞行器,主要由飞行器平台和机载任务载荷组成,一般可重复使用。无人机具有零飞行人员伤亡、持续作战能力强、全寿命周期成本低、允许机动过载大等优势,主尺度、飞行速度等包线范围宽等特点,在军事领域用途广泛。
参考美国国防部发布的《无人机系统发展路线图2005—2030》,可将海上无人机划分为10个自主控制等级[7]:1级-遥控引导;2级-实时故障诊断;3级-适应故障和飞行条件;4级-机载航路重规划;5级-多机协调;6级-多机战术重规划;7级-多机战术目标;8级-分布式控制;9级-机群战略目标;10级-全自主集群。
5 未来海洋建设的发展思考
虽然前文部分应用实例以军事应用为主,但人工智能技术未来将在智慧海洋建设进程中拥有广阔的应用前景。现结合人工智能技术与智慧海洋融合创新提出几点建议。
5.1 发挥人工智能在军事科研中的牵引作用
联合作战已成为信息化条件下的基本作战样式。具有高度智能化的无人系统可在联合作战中大规模投入对地、对海进攻,也可作为防御武器,阻击战斗机、水面舰和潜艇。将新模式和新方法发展需求与装备创新相结合,并考虑未来特定作战环境和作战对象下的实际应用,形成针对性强、作战能力独特的无人系统作战模式。军事智能技术发展涉及专业面广,需进一步做好人工智能军事科研工作。
5.2 加快人工智能在海洋领域的创新发展路径
世界范围内舰船基础性科技正处在全面创新发展的重要时期,这有力地促进了舰艇各领域的全面变革,催生了换代型装备和新概念武器的问世,推动着舰船装备体系、海军作战概念的变化。
在研发和推进海上人工智能无人系统发展中,需突破相关的关键技术,并注重关键技术研究成果的演示验证和工程转化,以夯实无人系统的发展基础,加速我国海上人工智能无人系统科技创新发展。
6 结 论
本文介绍人工智能技术在海洋中的应用,并梳理其在智慧海洋尤其是海上无人装备中的应用现状,详细介绍3种实现海上无人装备智能化的人工智能技术:水下图像识别技术、水下立体视觉技术和海上障碍自主避碰技术。介绍3种海洋智能平台与无人装备:海上无人艇、无人潜航器和无人机。提出加快人工智能在智慧海洋建设中的两点建议。本文可为海洋科研人员提供人工智能的应用框架,以服务我国智慧海洋建设。