基于下游大水位变率的下水式垂直升船机随动技术的设计与实现
2021-10-28徐扬帆路明明
徐扬帆,路明明,李 彬,郑 超
基于下游大水位变率的下水式垂直升船机随动技术的设计与实现
徐扬帆1,路明明1,李 彬2,郑 超1
(1.中国船舶重工集团武汉船舶工业有限公司,武汉 430022;2.武汉长海高新技术有限公司,武汉 430223)
下游航道水位变率大,快速适应水位变化的准确停位随动技术,对下水式升船机的传动控制很重要。本文介绍下水式垂直升船机随动控制技术。首先,对控制对象的特性进行分析,描述了系统的速度运行曲线,对位置控制功能进行了研究。然后,搭建试验平台对本控制方案的性能进行了测试,给出了测试的方法和试验结果。实验结果表明本控制系统具有定位精度高、响应速度快等优点,能够适应下游大水位变化率的下水式垂直升船机准确停位要求。
下水式升船机 大水位变化率 准确停位随动技术
0 引言
目前国内垂直升船机大致分为全平衡钢丝绳卷扬垂直提升、下水式钢丝绳卷扬垂直提升和全平衡齿轮齿条爬升等几种形式。下水式升船机其船厢可以直接进入水中,可以根据航道水位变化寻找减速点和停位点。升船机的运行要求停位时船厢内的标准水位和上、下游的水位一致。在船厢运行的各个阶段,航道水位是变化的,变幅和变率也可能较大,船厢运行的目标位置(上、下游水位)应根据水位实时变化。针对下水式船厢动态控制,开展船厢减速停位检测等相关科学问题的研究,具有重要意义。
1 跟随水位变化准确停位控制技术研究
1.1 控制对象特性分析
下水式升船机航道水位波动较大,而船厢水位与航道水位对接时水位差有一定的要求。卷筒造成的钢丝绳偏移在高行程的升船机中已不可忽视,在对位阶段对电气传动行程计算提出了很高要求,需要更好的随动控制特性,并纠正此前因钢丝绳卷筒当前绳槽转动到接近到两侧钢丝绳偏离垂直角度最大所造成的行程误差,快速适应水位变化的随动技术快速跟踪水位变化,找到最佳停机点。
为了纠正由于传动机构间隙,结构变形等原因引起的位置误差,在上游方位上安装了四个接近限位开关(B0-B4,),当接近限位开关(B0-B1)动作时,船厢实际位置强制被纠正为预设定位置值,避免位置误差对定位精度的影响。由于入水式升船机在下游方位上无法安装接近限位开关且水位变率快,原控制方法无法满足需求。
1.2 速度运行曲线
下水式升船机在入水前需要减速,再进入水中低速运行,按S型速度图运行,使船厢具有位置低速微调运行功能,能动态适应上下游水位的变化。使系统速度为零,承船厢停位,保证系统停机的平稳无冲击,并且升船机实现准确的定位。研究闭环位置控制(动态位置控制技术),电流/转矩环、速度环三闭环控制,提高位置控制精度。与上下游水位对接时,能使承船厢按S型速度图运行,具有船厢位置低速微调运行功能,能动态适应航道游水位的变化。
如图1所示,常规小惯量系统中,采用简单的斜坡控制来调整加速度(加速度变化率通常非常大)通常能满足要求。而升船机刚性连接的驱动系统是一个大惯性多变量耦合系统,所以系统选用如下图右所示的S形曲线,可以非常平滑的控制加速度和加速度变化率,极大地减轻系统的冲击,保证系统运行的稳定性,同时避免对精确定位的影响。

图1 速度运行曲线
1.3 位置控制技术研究
本方案中不采用变频器的斜坡函数发生器输出作为速度环速度的给定值;而是在其它控制器中设计一个速度信号给定发生器,一个完整的运行过程应该是一条S形速度曲线图。根据升船机船厢的当前高度、运行前的目标位置(根据实时水位的变化)、位置控制器速度补偿值和设定的运行速度产生运行当前时刻的升船机船厢的运行速度,并实时传送给正在运行的传动装置作为速度给定。
这个发生器的工作可以由正常停机命令、快速停机命令、紧急停机命令改变运行运算条件,从而生成相应的运行曲线、停机曲线或中断运行。由于系统长期运行可能的系统误差和传动机械固有误差,故控制系统需要有精确动态校准功能,以保证控制系统内基准与外部事实基准一致。精确定位开始后,系统实时采集主站实际位置反馈信号,并与目标定位位置送入现地控制单元最优运行轨迹,控制加减速及位置差补,形成精确定位控制。位置控制原理图如图2所示。

图2 位置控制原理图
本控制方案中涉及三个位置,分别是实际船厢位置、设定目标位置和积分位置;当任意两个位置的差值趋近于零时,表明驱动电机转速趋近于零时且位置偏差也为零,即实现了准确停位。在准确停位过程中,若出现速度趋近于零但位置偏差不为零;或位置偏差趋近零时,速度不趋近于零时,需优化位置控制器PI参数、积分时间参数。
在运行过程中,由于外界环境易导致目标位置水位发生变化(即运行行程变大),可分为二种情况讨论:
1)若传动装置各电机在减速点前出现目标位置增大,则此状态和没减速前状态一致;
2)若传动装置各电机在减速点后出现目标位置发生变化,当开方器输出的速度给定值大于速度设定值时,各传动装置电机会出现加速或匀速运行,由于在减速区间段外界目标位置变化率小于电机运行位置变化率,因此直至开方器输出的速度给定值小于速度设定值后开始减速。
船厢运行在空气中时,速度曲线运行在A-B-C曲线段。船厢入水前需减速,即从C点开始减速,对应C-y-D曲线段。入水后按照指定入水运行速度开始运行,对应曲线D-E段。
船厢在运行过程中,目标位置能实时跟随上下游水位实时变化。从控制原理图2可知:当传动装置在减速点E前,由于积分的位置与实际目标位置的绝对值经开方器输出的速度值(对应图2的X-E曲线段)大于速度的设定值,此时选择器输出的值为速度的设定值,经斜坡函数发生器后输出值作为各传动装置的速度给定值,故船厢按照入水后的正转速度设定值或反转速度设定值运行,如图2的D-E曲线段。当积分的位置与实际目标位置的绝对值经开方器输出的速度值小于速度的设定值,此时选择器输出的值为开方器的输出值,速度曲线为E-z-F曲线段。
因此船厢的运行曲线由二段曲线ABCYDE与xEZF合成而成。
2 技术方案论证
2.1 试验平台构建
(1)试验设备型号
“适应下游大水位变率的下水式船厢动态控制技术”试验样机主要器件包括现地控制柜低压器件、可编程逻辑控制器(西门子S7-400PLC)、交流变频传动装置(采用VLT丹佛斯(Danfoss)公司FC302系列矢量控制变频器)、三相交流异步电机、测速编码器等设备组成。
(2)电机位置换算减速齿轮箱、机械同步轴系统等设备参数为参考,结合试验电机铭牌为原则,构建的电机位置换算关系如下:
1)试验电机转速:1465转/分;配增量型脉冲编码器:1024脉冲/转
2)齿轮箱减速比:1519.9
3)转筒直径:4米;转筒周长:12.5664米
因此;电机实际位置(船厢实际位置)等于脉冲数*12.5664/1519.9/1024。
(3)测试软件
运用Autem PLC-ANALYZER软件采集记录电机的速度数据波形,采样周期20毫秒。
2.2 试验分析
2.2.1下游航道水位持续增加模拟试验
(1)试验方法
1)设置运行参数。电机运行速度739转/分、船厢初始位置0米、下游水位值14米(目标位置)、下游水位变化率300 厘米/4分钟;
2)试验分析
从记录的试验波形可知:船厢实际位置是15.713米处电机开始按照设定减速度开始减速,此时下游水位值是16.461米、下游水位变化值为246.057厘米。由于下游水位值(目标位置)在持续增加,且变化率比较大,因此电机速度只减速到(约)106转/分恒速运行。只有当下游水位值接近恒定或变化量很小时,电机再次开始减速至零,此时船厢实际位置与下游水位值偏差-4毫米。
3)试验波形
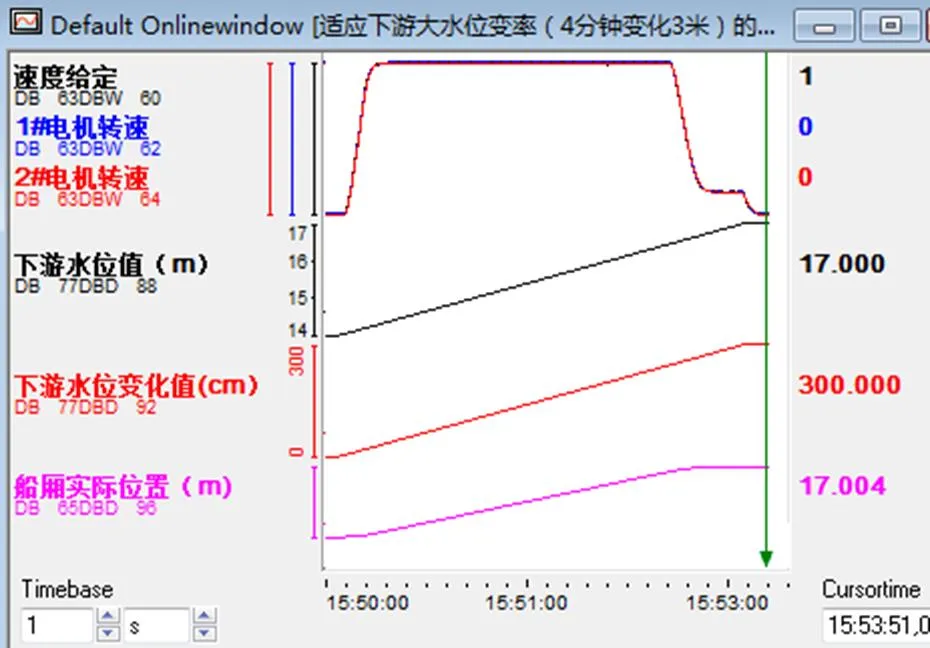
图3 适应下游大水位变化率的下水式船厢试验波形
2.2.2下游水位持续减少模拟试验
1)设置运行参数: 电机运行速度739转/分、船厢初始位置0米、下游水位值17米(目标位)、下游水位变化率-300厘米/4分钟;
2)试验分析
从记录的试验波形可知:船厢实际位置是14.429米处电机开始按照设定减速度开始减速,此时下游水位值是14.805米、下游水位变化值为-219.507厘米。由于下游水位值(目标位)在持续减小,且变化率比较大,因此控制好减速度避免出现船厢实际位置比下游水位值大得过多显得非常重要。
从波形上可以看出,电机转速开始反向加速,反向速度最大(-142转/分)时船厢实际位置(14.681米)与下游水位值(14.627米)偏差负向最大,随后电机反向加速到(约)106转/分恒速运行。只有当下游水位值接近恒定或变化量很小时,电机再次开始减速至零,此时船厢实际位置与下游水位值偏差2毫米。
3)试验波形,如图4所示。

图4 适应下游大水位变化率的下水式船厢试验波形
3 结论
本文对下游大水位变化率的下水式垂直升船机准确停位、快速适应水位变化的随动技术进行了研究,选取通用变频器丹佛斯FC302及西门子S7-400PLC控制器搭建试验平台,通过试验记录的波形可知:本控制系统具有定位精度高、响应速度快等优点,能够适应下游大水位变化率的下水式垂直升船机准确停位要求。
[1] 李彬, 谭明波, 翁晨雷. 三峡升船机传动控制系统电气行程同步性能测试[J]. 船电技术, 2014, 34(7): 27-29.
[2] 刘红兵. 升船机主拖动系统性能研究[D]. 哈尔滨: 哈尔滨工程大学, 2003.
[3] 秦雅岚, 唐勇, 王伟. 垂直升船机多轴多电机机械同步力矩均衡控制技术的研究与应用[J]. 中国水运, 2011, 11(1): 106-108.
[4] 马小亮, 蒋琪, 等. 升船机交流主拖动系统几个特殊问题的研究[J]. 电力电子技术, 2000, 5.
Design and Realization of Follow-up Technology of Submerge Chamber Ship Lift Based on Large Variation of Downstream Water Level
Xu Yangfan1, Lu Mingming1, Li Bin2, Zheng Chao1
(1. China Shipbuilding Industry Group Wuhan Shipbuilding Industry Co., Ltd, Wuhan 430022, China;2. Wuhan Great Sea Hi Tech Co., Ltd, Wuhan 430223, China)
TP273
A
1003-4862(2021)10-0048-04
2020-12-16
国家重点研发计划“重大水利枢纽通航建筑物建设与提升技术”(课题编号:2016YFC0402002)
徐扬帆(1985-),男,工程师。研究方向:电力电子与电气传动。E-mail: libin1979121@163.com
