船舶电力系统的故障诊断及处理研究
2021-10-28桂永胜张志远杜罗娜
桂永胜,张志远,杜罗娜
船舶电力系统的故障诊断及处理研究
桂永胜1,张志远2,杜罗娜2
(1. 海装驻武汉地区第二军事代表室,武汉 430064;2. 中国舰船研究设计中心,武汉 430064)
介绍了一种船舶电力系统监控架构,针对该监控架构提出故障诊断及处理策略,将电力系统的故障分为直流幅压电网故障、交流电网故障和直流24 V电网故障,给出不同故障诊断的依据及判断部位。针对不同故障,提出不同的处理措施,当供电支路发生过载或短路故障时,通过分级保护实现供电支路的隔离;当电源发生故障停机时,通过电力系统拓扑结构改变,实现故障重构,恢复未故障区域供电。该故障诊断及处理策略能够满足电力系统自主运行的需求,适用于无人舰船。
故障诊断 分级保护 故障重构 自主运行
0 引言
船舶的无人化是当今世界船舶行业的一个重要发展方向。船舶的无人化要求船舶电力系统更加智能化、信息化。通信技术、控制技术、电力技术等相关行业的发展为电力系统实现智能化和信息化提供了可能[1]。
船舶电力系统的主要动力来自蓄电池、柴油发电机等设备。船舶电力系统的主要辅机,即电网用户,包括泵、风机、电子设备等。船舶电力系统通过直流断路器、交流断路器、DC/AC电源、DC/DC电源等设备实现电力系统的输配电,将蓄电池、柴油发电机等设备的输出电压转换为船舶电力系统用户需要的电制。同时,利用直流断路器、交流断路器实现电力系统的分级保护功能[2]。
电力系统在运行过程中,电力系统的组成设备,如蓄电池、断路器、DC/AC电源、DC/DC电源等,一旦发生故障,会造成某个或部分电力系统用户失电。目前,船舶电力系统主要通过电力系统监控设备进行故障后的分析,而电力系统监控设备只能记录稳态数据,数据的采集频率低,约为1 Hz左右,难以真实地复现电力系统发生故障时的状态。并且,电力系统发生故障后,需要人员去进行判断和操作,从而尽可能地恢复失电设备的供电。且断路器需要手动操作,非常耗时。
船舶电力系统的网络调度自动化是新近发展的一项能有效提高供配电系统安全运行能力及可靠性的技术[3]。中央计算机为整个系统的核心,对每一个终端计算机进行寻址通信,采集相关信息,将其按逻辑方程解算,然后把解算结果的信息指令通过数据总线传递到相应终端计算机,控制负载的通断。本文介绍的船舶电力系统通过应用自动控制技术、通信技术、高频采集技术等实现电力系统的自主运行、故障诊断和故障处理。
1 船舶电力系统架构
图1是本文设计的船舶电力系统架构简图,该电力系统主要由直流幅压电网、50 Hz交流电网、直流24 V电网构成。直流幅压电网主要由蓄电池组、直流配电设备、推进电机控制板、推进电机等构成。直流幅压电网主要负责向推进电机、船舶直流辅机用户、船舶逆变电源、直流24 V UPS等供电。50 Hz交流电网主要由逆变电源、配电设备、变压器等构成,主要负责向船舶交流辅机用户供电。直流24 V电网主要由直流24 V UPS、配电设备等构成,主要负责向船舶直流24 V 辅机用户供电。

图1 船舶电力系统架构
本文所述电力系统的左舷和右舷正常工况下一直保持独立,即母联断路器一直保持断开。对于直流幅压电网,正常工况下,由两组蓄电池分别向左舷和右舷的直流辅机用户、推进电机、逆变电源以及直流24 V UPS提供直流电。当一舷的蓄电池组出现故障,由另外一舷的蓄电池组为全船用电负荷供电。对于50 Hz交流电网,正常工况下,由两台逆变电源装置分别向两舷的交流用户供电,当一台逆变电源装置故障或失电时,由另外一台逆变电源装置为全船交流用户供电。对于直流24 V电网,当一舷的直流24 V UPS故障或者无法供电时,由另外一舷的直流24 V UPS为全船直流24 V用户供电。
2 船舶电力监控系统设计
根据所述电力系统架构,设计了图2所示的电力监控系统架构。为了实现对直流幅压主干网络和50 Hz交流电网主干网络的信号采集,在直流配电板和交流配电板的各个支路布置了霍尔电流传感器,在直流配电板和交流配电板的母排和电源进线端布置了霍尔电压传感器。图2所示的录波采集箱内的录波采集模块内置模拟量采集板卡和开关量采集板卡,能够将霍尔传感器输出的模拟量信号和断路器自带的辅助触点信号转换为数字量信号。同时,录波采集模块通过内置的CPU模块将上述数字量信号在CPU模块的内存中不断的进行判断和刷新,一旦上述数字量信号满足故障判据,便将故障点前后一段时间内的数据按照40 kHz的采集频率存入CPU模块内的硬盘中。如果上述数字量信号不满足故障判据,则将送入CPU模块内的数字量信号按照1 kHz的采集频率存入CPU模块的硬盘内。
电力系统的主要电源设备包括两台直流24V UPS和两台逆变电源。逆变电源能够通过CAN总线向外部发送自身的电压、电流、频率信息、工作状态,同时逆变电源自身能够根据设备内部的采集装置进行故障判断,能够识别的主要故障包括过载、过压、输入绝缘低、输出绝缘低、过热、输入欠压、逆变装置输出是否短路等故障,上述故障信息能够通过CAN总线发送到图2所示的录波采集箱内的CANHub。直流24 V UPS能够通过CAN总线向外部发送自身的电压、电流、工作状态等信息,同时直流24 V UPS自身设置了监控模块,该监控模块能够识别UPS装置本身的输出过载、输出过压、输入过压、输入欠压、过温、输出短路等故障。另外,UPS装置本身采用模块化设备,因此监控模块还设置了与UPS装置各个电源模块之间的通讯故障,一旦某个模块损毁或故障。上述的UPS装置故障均能通过自身的CAN通讯发送至图2所示的录波采集箱内的CANHub。
电力系统的主要配电设备包括直流配电板、交流配电板、直流配电箱、交流配电箱、直流24 V配电箱。直流配电板和交流配电板主要电量信息均通过霍尔传感器进行采集,并由录波采集模块进行A/D转换、故障判断及存储。直流配电箱、交流配电箱通过内置的PLC及传感器实现对电压、电流以及开关状态信息的采集,直流24 V配电箱通过内置的采集电路实现对电压、电流以及开关状态信息的采集,直流配电箱、交流配电箱、直流24 V配电箱通过CAN总线将采集的信息送至录波采集箱内的CANHub。
为了实现对电力系统蓄电池组的监测,电力监控系统配置了一套蓄电池监测装置。蓄电池监测装置能够实现对蓄电池组的总电压、总电流、剩余电量等的监测,同时也能实现对每块蓄电池的电压及温度的监测。蓄电池监测装置能够根据监测到的蓄电池电压和温度对蓄电池状态进行判断,当蓄电池的电压或者温度超出阈值时,蓄电池监测装置即认为此蓄电池为故障。蓄电池监测装置能够判断出当前状态下的总的故障电池数目,并将蓄电池的故障数、蓄电池组的电压、蓄电池组的电流等信息通过以太网发送至能量管理柜。
为了实现对电力系统绝缘状态的检查,电力监控系统配置了一套绝缘监测装置。该绝缘监测装置由一套直流绝缘监测装置和两套交流绝缘监测装置构成。其主要功能有:(1)在线测量直流电网和交流电网在正常工作工况下的供电网络及各个支路的绝缘电阻,并将测量结果通过CAN通讯传输给能量管理柜;(2)接收能量管理装置离线绝缘测量指令,离线测量直流配电板主动力蓄电池组断路器进线支路及各个用电支路的绝缘电阻,离线测量交流配电板进线支路及各个用电支路的绝缘电阻,并将测量结果通过CAN通讯传输给能量管理柜;(3)当电网绝缘电阻低于预设值时,自动启动故障支路定位功能,判断故障负载支路并通过状态灯显示,同时给能量管理柜发送报警信息及故障支路。
录波采集模块对电压电流信息、开关状态信息进行存储、分析和故障判断后,并将结果通过以太网发送到显控模块(PCM)和控制模块。显控模块采集以太网和CAN网的所有信息以及通过显控模块触摸屏本身下发的控制指令信息进行存储,同时将本身所能采集到的所有信息发送给上级的综合控制系统。控制模块作为逻辑处理中心,接收来自能量管理柜本身的控制部位和控制模式指令、来自显控模块的控制指令、来自综合控制系统的控制指令以及其他参与逻辑处理的其他CAN通信设备和以太网通信设备。

图2 电力监控系统架构
3 船舶电力系统故障诊断及处理
根据电网类型,将电力系统的故障分为三类:直流幅压电网故障、交流电网故障、直流24 V电网故障。
3.1 直流幅压电网
直流幅压电网故障主要分为电源故障和供电支路故障。电源故障是指蓄电池组发生故障,电压超出正常供电电压,部分电池温度过高,无法正常工作,需要及时切除故障电池,减少蓄电池放电电流,从而避免电池故障扩大化,而为了保障电力系统的正常运行需要进行直流幅压电网故障重构。供电支路故障是指供电支路出现过载或者短路,为了避免支路故障扩大化,实现故障隔离,需要及时切除故障支路。
蓄电池组是电力系统最重要的动力来源,电力系统正常运行时,1号蓄电池组和2号蓄电池组分别给左、右舷电网供电,供电拓扑结构详见图3,每块蓄电池顶部都配备了蓄电池监测模块,实时监测蓄电池电压和温度,当监测到电压和温度超出正常范围后,上传故障信息,蓄电池监测装置主机汇总故障电池个数,监测电池组总电压,当故障电池数量超出一定数量时,电池组总电压范围超过直流幅压用户设备正常工作电压,不满足直流幅压电网的电压要求,需要及时切除故障电池组,能量管理装置判断另一组蓄电池组故障数低于要求值,电压满足并联供电要求后,下发直流配电板内故障蓄电池组供电开关分断指令,同时闭合直流配电板内母联开关,实现单组蓄电池组给左右舷电网供电,供电拓扑结构如图4所示。

图3 直流电网左右舷独立供电拓扑结构

图4 故障模式下单蓄电池组供电拓扑结构
直流配电板各个供电支路均设置了电流传感器,能够实时采集电流信号,当电流突变超过一定阈值后,能量管理装置内部录波模块进行越线报警,并以40 kHz的采样频率采集电流和电压信息进行存储,作为故障分析的依据。目前有效的故障支路切除是依据断路器自身的保护特性,蓄电池供电开关、供电支路开关和直流配电箱内开关设置分级保护,通过时间和电流实现分级切除。当电流超出短路整定值后,对应支路断路器分断,切除最小故障支路,实现故障隔离,恢复未故障区的正常供电。
3.2 交流电网
交流电网故障主要分为电源故障和供电支路故障,电源故障是指逆变电源发生过压、绝缘低、过热、短路等,电源故障主要由逆变电源对设备状态判断并上传给能量管理装置。供电支路是指交流配电板供电支路或交流配电箱内供电支路过载、短路等故障,通过分级保护,及时切除故障。
逆变电源从直流幅压电网取电,是交流电网的动力来源,交流电网正常工作时,1号逆变电源和2号逆变电源分别给左、右舷交流电网供电,供电拓扑结构详见图3所示。当逆变电源监测到输入欠压、绝缘值较低、过热、输出欠压、过压等故障时,逆变电源会自动停机保护,保证设备自身的安全,同时给能量管理装置上传故障信息。此时一舷交流电网断电,能量管理装置判断另一台逆变电源工作状态,如果另一台逆变电源无过载,运行正常,能量管理装置会下发交流配电板内故障电源供电开关分断指令,同时闭合交流配电板内母联开关,实现单台逆变电源给左右舷交流电网供电,供电拓扑结构如图6所示。
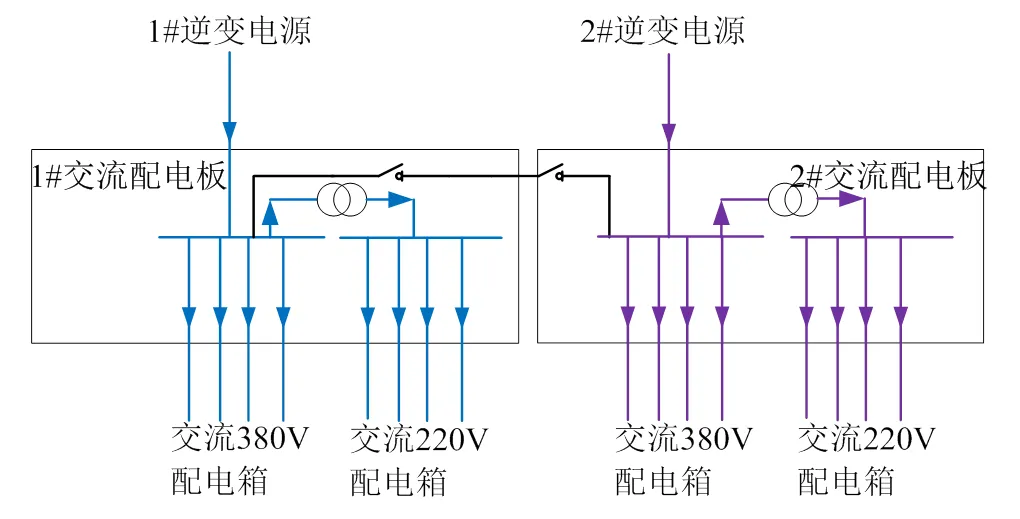
图5 交流电网左右舷独立供电拓扑结构

图6 故障模式下逆变电源供电拓扑结构
交流配电板各个供电支路均设置了电流传感器,能够实时采集到电流信号,当供电支路出现电流突变时,能量管理装置内部录波模块进行越线报警,并以40 kHz的采样频率采集电流和电压信息进行存储,作为故障分析的依据。目前有效的故障支路切除是依据断路器自身的保护特性,逆变电源供电开关、供电支路开关和交流配电箱内开关设置分级保护,通过时间和电流实现分级切除。当电流超出短路整定值后,对应支路断路器分断,切除最小故障支路,实现故障隔离,恢复未故障区的正常供电。
3.3 直流24 V电网
直流24 V电网故障主要分为电源故障和供电支路故障,电源故障是指直流24 V UPS出现输入过压、过温、输出短路等故障,直流24 V UPS内部监控模块对各个模块的故障状态进行监测并上传给能量管理装置。供电支路故障是指直流24 V配电支路出现过载或短路故障,当电流过大时,切除供电支路,实现故障隔离,同时恢复未故障区的正常供电。
正常工况下,直流24 V UPS从直流幅压电网取电,给直流24 V电网供电,供电拓扑图详见图7,当直流24 V UPS出现欠压故障时,24 V UPS从自带备用电池取电,给直流24 V电网供电,保证重要用户不断电;当直流24 VUPS出现过温、过压等故障,直流24 V UPS会停机保护,保证电源设备自身的安全,同时将故障信息上传给另一台直流24 V UPS和能量管理装置,正常工作的直流24 V UPS通过闭合母联开关,实现失电侧直流24 V电网断电恢复,由于直流24 V配电箱内采用的是电力电子开关,断电后支路分断,能量管理装置监测到母联开关闭合,会下发断电恢复的直流24 V配电箱支路闭合指令,恢复供电,实现直流24 V电网故障重构,供电拓扑结构详见图8。

图7 直流24 V UPS左右舷独立供电拓扑结构
直流24 V配电箱内部配置了单独的采集电路,当电流超出过载或短路电流时,直流24 V配电箱快速分断支路,实现故障电路的切除,其它未故障支路电压在短暂的拉低后恢复正常,有效实现了故障的隔离。
直流幅压电网、交流电网和直流24 V电网故障可通过断路器分级保护切断故障支路,恢复非故障区供电,如果电源发生故障,则需要通过供电拓扑结构的变化,来实现供电重构。
4 小结
本文介绍的故障诊断及处理技术,能够实现无人舰船上的电力系统状态实时监测,通过分级保护原则,及时将故障区域进行隔离,有效保证电力系统的正常运行。能量管理装置作为电力系统的监控中心,在电力系统自主运行过程中,当电源发生故障停机,引发一舷电网失电时,能够迅速进行故障重构,快速恢复未故障区域的供电,满足电力系统自主运行的需求。电力系统的架构及故障诊断及处理策略,能够有效保证电力系统的自主运行,同时对故障信息进行存储,能够快速定位故障,适用于各类无人舰船,满足自主化、智能化的新需求。

图8 故障模式下直流24 VUPS供电拓扑结构
[1] 苏绍娟, 韩静, 王天霖等. 船舶无人化对船舶设计的影响[J]. 船舶工程, 2018(s1): 346-351.
[2] 庄劲武, 张晓锋, 杨锋, 等. 船舶直流电网短路限流装置的设计与分析[J]. 中国电机工程学报, 2005, 25(20): 26-30.
[3] 傅荟璇. 大型船舶电力系统网络拓扑重构技术研究[J]. 全国优秀硕士论文, 2007.
Research on Diagnosis and Processing of Ship Power System Faults
Gui Yongsheng1, Zhang Zhiyuan2, Du Luona2
(1. Second Military Delegates’ Office in Wuhan, Wuhan 430064, China; 2. China Ship Development and Design Center,Wuhan 430064, China)
U665.1
A
1003-4862(2021)10-0001-05
2021-06-28
桂永胜(1970-),男,高级工程师。研究方向:船舶操纵控制,船舶电气。E-mail: 13707115537@139.com
