冗余智能化船舶能量优化管理系统设计
2021-10-28郝卫明刘文达
郝卫明,刘文达
冗余智能化船舶能量优化管理系统设计
郝卫明,刘文达
(武汉船用电力推进装置研究所,武汉 430064)
智能化船舶是船舶自动化技术发展的必然趋势,船舶能量管理系统也在向着精细化、智能方向发展。本文介绍了一种热冗余智能化船舶能量优化管理系统的组成和功能,并对系统进行了硬件设计和软件设计,梳理了系统工作流程。为后续冗余智能化船舶能量优化管理系统的实现奠定基础。
船舶 能量管理系统 优化控制 热冗余
0 引言
随着船舶电网容量越来越大,船舶电站配置也越来越复杂。而且,船舶负载设备功率等级更高,船舶运行工况更加复杂、多变。传统船舶能量管理系统通常采用单控制器作为能量管理系统主控制器,机组控制和保护模块控制机组进行功率分配及增减机组,没有从船舶总体及船舶所处环境这一层面进行船舶能量管理。缺少基于大数据和人工智能的智能化辅助控制系统,从船舶运行状态、环境条件的实时状态及船舶、环境条件的历史数据出发,综合多因素进行能量优化管理。现有能量管理系统在智能化和能量管理的优化控制方面存在较大的提升空间[1]。
1 系统简介
能量管理系统是船舶电站的核心,目前船舶电力系统中的能量管理系统多以单控制器或双控制器、分布式I/O及机组控制器组成,无法满足DP-2及以上动力定位系统对船舶能量管理系统的要求,从系统集成化的角度出发,船舶各系统配置的各类传感器实时感知船舶的运作状态及环境状态,将这些数据进行深入分析及挖掘,对船舶能量管理系统中的控制参数进行实时动态调整,以满足全船能量精细化、智能化的管理。使船舶电力系统更加可靠、稳定、智能。
1.1 系统组成
热冗余的智能化船舶能量优化管理系统主要由智能辅助控制模块、热冗余控制器、现场I/O模块、机组控制器、机组恒频率控制器、调压器、机组调速机构,同步模块等组成。热冗余的智能化船舶能量优化管理系统的核心在于智能辅助控制器。
主电网上连接有多个机组控制器及主发电机组,机组控制器上连接有调压器和调速器,机组控制器分别连接现场I/O模块和控制器模块,主/备用控制器组成的热冗余控制模块通过交换机与智能辅助控制模块进行数据信息交互,同样热冗余控制模块可通过交换机与现场的各类设备和系统进行数据交互,智能辅助控制器可通过对接入系统的数据进行处理,综合决策,适时调整能量管理系统的控制参数及控制策略。

图1 系统组成
1.2 系统主要功能
热冗余的智能化船舶能量优化管理系统可以为船舶电力系统、特别是具有定位能力要求的电力推进的船舶提供安全、可靠、节能的控制功能及智能化的控制策略。
热冗余的智能化船舶能量优化管理系统可实现如下主要功能:
1)本系统的主用、备用控制器具有热备冗余功能、主备用控制器之间的可实现实时切换,进一步降低了系统的故障率,可确保在苛刻条件下的供电连续性。
2)本系统的主备用智能辅助控制期具有热备冗余功能、主备用辅助控制器之间的可实现实时切换,确保随时进行能量控制参数的实时调整,更加智能化,可保证控制策略的实时优化。
3)本系统可通过冗余的机组控制器和机组恒频控制模块实现发电机组在恒频和下垂两种模式工作。确保电网供电连续性和可靠性。
4)本系统具备传统的能量管理系统的所有功能、如自动、半自动模式的并车、解列、黑船自启动、分解卸载、以及负载管理。
5)本系统具有故障诊断功能,在经过系统故障模式分析及故障模式识别,进行故障定位及故障维修方案。并为设备及元器件寿命管理提供接口,为设备智能化维修保养提供升级空间。
2 硬件设计
本系统的主控制器采用热冗余控制器,并配置有同步模块,通过同步总线(可用光纤或电气介质)进行实时同步通讯,两套控制器独立运行并互为备用。智能辅助控制模块通过采集动力系统、机舱监测报警系统、动力系统的实时运行参数,处理后结合各系统历史数据建立的船舶动态控制优化模型、动力系统故障诊断模型、动力设备状态评估模型和系统控制策略优化模型,为船舶提供高效的能效管理、准确的动力系统故障诊断、故障预警、动力设备运行状态评估、优化的动力系统控制策略以及智能化的动力系统运行维护;智能辅助控制模块还会通过自学习功能,对系统中的各类模型参数进行调整和升级。
恒频模块、机组控制器与控制器通过现场总线进行数据通讯,系统设置了恒频工作方式、下垂工作方式,两种工作方式互为备用,当恒频模块或者机组控制器出现故障,控制器停止主发电机组的并车、解列、以及开关的合分闸控制,迅速切换到另一种工作状态,并依据电站能量需求继续进行相关控制工作。可自动或者手动切换,系统为手动切换提供误操作保护功能。各机组控制器配置了基于现场总线和基于硬线接口的两种负荷分配控制方案,两种负荷分配方式互为备用,并且满足分区供电情况下各分区负荷分配均衡。若其中一种控制方式出现故障,系统自动切换至另一种负荷分配模式,并进行声光报警。
主电网母联开关设置同步模块,对不同母线上的供电设备进行调频、调压,实现不同分区的汇流排同步,实现母联开关两端的某一带电母排不断电合母联开关。确保供电连续性。
3 软件设计
3.1 控制器软件功能结构
控制器以西门子可编程控制器为基础,采用博图V14平台进行开发编程,对硬件及网络进行组态编译,利用梯形图语言进行逻辑控制程序的编制,控制器程序主要实现全船动力设备的运行控制及供配电设备的控制与管理,主要包括了输入处理块、输出处理块、通信管理与处理块、供电设备管理块、负载管理块、应急处理块、决策与参数调整处理块等组成。主要功能如图2。

图2 控制器软件结构
输入处理块,主要处理与系统具有接口的设备或系统的状态信号、报警信号,并对短时“闪现”的故障信号进行锁存处理。
输出处理块,主要完成控制指令的发出及报警声光控制信号的输出,如开关合闸、电网电压超标等。
通信处理块,主要完成主、从控制器之间的数据同步,处理与远程接口模块、智能辅助控制模块之间的数据通讯,并对通信状态进行监控,出现通讯中断,进行报警,并尝试进行通讯恢复。
供配电设备管理块、主要实现柴油发电机组的自动启停、并车、解列、冷却停机、机组保护功能等,同时对配电网络中的各级母联开关进行同步合闸、分闸、分级卸载等功能。
负载管理块。主要实现电网负载的管理,包括负载开关合分闸、启停、转速控制、重载启动请求、主推进器推力分配等功能。
应急处理块,主要完成黑船启动、主备用设备转换等功能。
决策与参数调整处理块,程序依据智能辅助控制器发出的控制指令及控制参数,依据当前能量管理系统运行状态,对供配电设备管理块、负载管理块的控制策略和控制参数进行调整[2]。
3.2 智能辅助控制器软件功能
智能辅助控制器软件以Windows为软件开发平台,采用VS2010作为开发工具,建立全船设备的各工况及环境条件下的运行参数库优化模型[3]。
智能辅助控制模块综合分析船舶各系统运行状态及水文气象信息,经过数据处理为船舶动力系统提供优化的控制策略、故障诊断[4]及系统状态评估。结合各系统历史数据建立的航速、航迹优化模型、动力系统故障诊断模型、动力设备状态评估模型、系统控制策略优化模型为船舶提供高效的能效管理、准确的动力系统故障诊断、故障预警、动力设备运行状态评估、优化的动力系统控制策略[5]。
4 系统工作流程
通过冗余设置的控制器模块及智能辅助控制模块、机组控制器、恒频模块进行负荷的分配与控制,通过按照船舶机组数量配置的机组接口模块,实施分析来自船舶动力系统、机舱监测报警系统、动力定位系统等各系统的运行参数,采用人工智能技术实现船舶能量的优化管理和精确控制。
热冗余智能化船舶能量优化管理系统流程如图3所示,主要包括如下步骤:
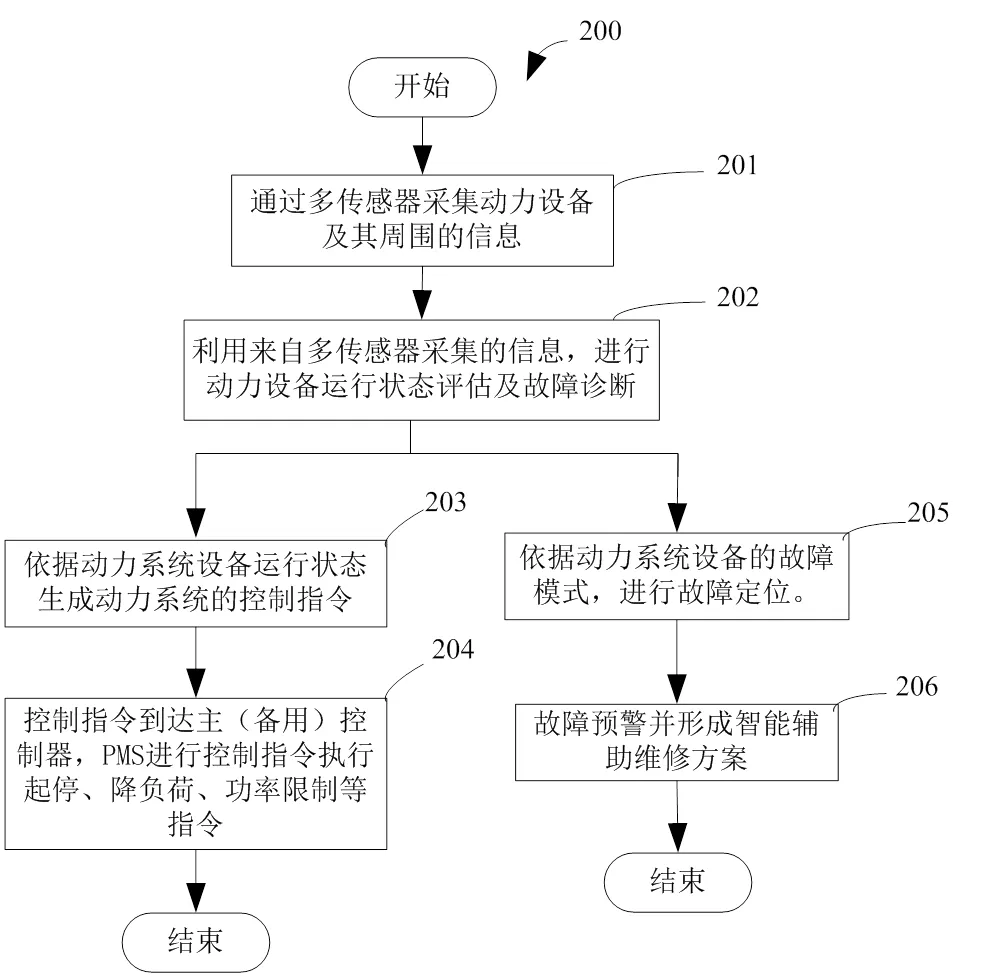
图3 系统流程图
步骤201,通过一个或多个网络接口,采集船舶动力系统设备的运行参数及其周围的环境状态信息;
步骤202,利用来自多网络接口采集的参数,通过智能辅助控制模块中的故障诊断模型及动力设备状态评估模型进行动力系统设备的故障诊断和状态评估;
步骤203,若动力系统设备正常运行,则依据动力系统设备的实时运行状态,生成船舶动力系统控制指令,还可结合来自船舶动力定位系统的水文气象信息通过人工智能算法优化船舶动力系统控制决策;
步骤204,能量管理系统的主/备用控制器接收到来自智能辅助控制模块的控制指令,执行起停、功率限制、降负荷、负载转移、主备用切换等指令;
步骤205,若动力系统设备存在故障,则依据动力系统设备的故障模式,进行故障定位和故障预警;
步骤206,依据动力系统设备的故障定位,进行故障记录,并依据故障模式形成辅助维修方案。
5 结束语
本文在传统的能量管理系统(PMS)的基础上,结合智能化技术,以船舶运行参数为驱动,对船舶电力系统的控制策略和控制参数进行实时调整,达到了船舶能量的优化管理的目的。
[1] 柯常国, 王劲, 杨俊飞. 电力推进船舶功率管理系统设计与研究[J]. 船电技术, 2013.9, 33(9): 17-21.
[2] 朱小平. 舰船主推进系统的建模理论、控制策略及优化设计[D]. 上海: 同济大学, 2007.
[3] 尹成, 颜成钢. Visual C++2010开发权威指南[M]. 北京:人民邮电出版社, 2010.
[4] 张永俊. 智能变电站变压器在线监测与故障诊断系统设计[D]. 成都: 西南交通大学, 2012.
[5] Damir Radan, Integrated control of marine lectricl power system[D]. Department of Marine Technology, Norwegian University of Science and Technology, 2008.
Design of Intelligent Ship Power Optimization Management System Based on Hot-standby Redundancy Controller
Hao Weiming, Liu Wenda
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
U664.8
A
1003-4862(2021)10-0045-03
2020-12-31
郝卫明(1988-),男,工程师。研究方向:船舶电力推进。E-mail: 15827524739@163.com
