直驱桥式起重机的模糊PID 控制研究
2021-10-28孙伟翔戴明阳张晓华
孙伟翔,侯 森,戴明阳,张晓华
(1.华东琅琊山抽水蓄能有限责任公司,安徽滁州 239000;2.中国电子科技集团第五十八研究所,江苏 无锡 214100;3.青岛前湾集装箱码头有限责任公司,山东 青岛 266500)
0 引言
如今我国起重设备的发展位于世界前列,相关设备主要应用于工矿、码头、交通运输等领域。传统起重机多以旋转电机为驱动源,通过变速器连接皮带、齿轮等传动机构,使电机高速旋转并牵引吊具运动。传统桥机常采用PID 控制,PID 控制虽然具有精度高、通用性强等优点,但在运用过程中需要建立精确的数学模型,控制参数也需要人工进行调整,控制缺乏灵活性,通常无法满足非线性系统的控制要求。现代制造业中对桥式起重机的研究大多将人工智能算法引入控制系统,以提高桥机的工作性能[1-3],研究者采用如神经网络控制、矢量控制、迭代控制等算法对桥机系统进行控制,并取得了一定效果[4-10]。传统桥式起重机结构复杂,存在系统笨重、运行过程噪音大、维护困难等缺点。随着直线电机技术的不断完善,应用范围越来越广。将直线电机引入到桥式起重机上,不但可以克服部分传统旋转电机结构上的不足,而且具有低转速、大转矩、小体积、无噪音、环境适应性强等优点[11-12]。由于直线电机具有非线性、强耦合等特点,会使系统更容易受到外界干扰。为减少外界造成的影响,本文采用PID 控制结合模糊控制技术模拟人脑推理计算过程,设计模糊PID控制器对直驱桥式起重控制系统进行优化。仿真结果表明,基于模糊PID 控制的直驱桥式起重系统相比传统桥式起重系统启动更加平滑,具有更好的鲁棒性,可使推力超调降低18.6%。
1 直驱桥式起重机系统结构及其数学模型
1.1 系统结构
整个直驱桥式起重机结构由永磁同步直线电机(Permanent Magnet Synchronous Linear Motor,PMLSM)和盘式直线电机两部分构成,PMLSM 作为桥式起重机横梁走向的驱动源,盘式直线电机驱动吊具。整个系统由直线电机初级电枢绕组(定子)、动子、吊具等组成,其中直驱桥式起重机系统结构如图1 所示。
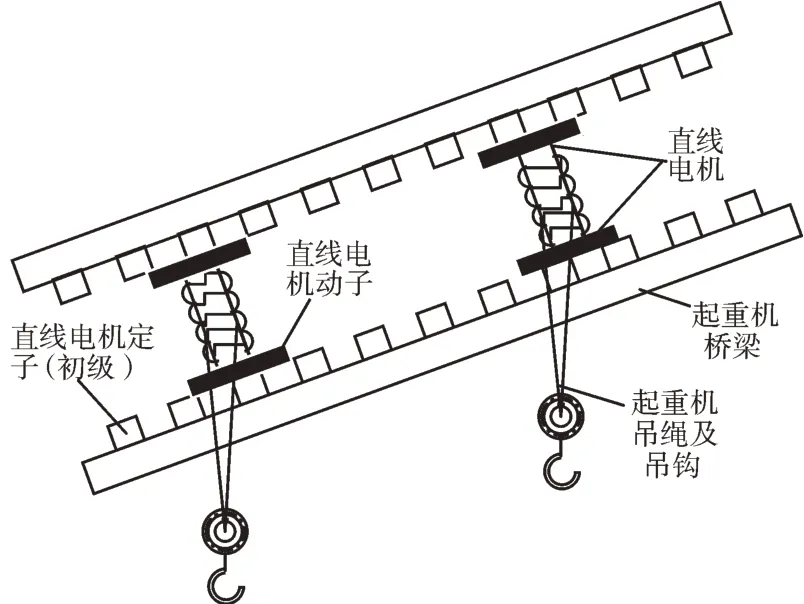
Fig.1 Structure of direct drive bridge crane图1 直驱桥式起重机结构
1.2 系统数学模型
直驱桥式起重机系统主要利用永磁同步直线电机直接驱动的特点,其数学模型可简化为PMLSM。在建立PMLSM 理想数学模型之前,对条件作以下假设[13-15]:①忽略铁心饱和及温度的影响;②不计铁芯涡流、磁滞损耗;③不考虑电机纵向端部效应,电机永磁无阻尼;④永磁体电导率为零且磁场恒定;⑤电枢绕组感应电势呈正弦波分布,线圈均匀分布。
对PMLSM进行d-q坐标变换。其中,PMLSM 的d-q轴电压方程为:

式中,W为电机速度,τ为极距,R为电枢电阻,φf为永磁体磁链,Ld、Lq分别为直轴与交轴电感,Ud、Uq分别为直轴与交轴电压,id、iq分别为直轴与交轴电流。
在无任何外力的情况下,电机输入功率为:
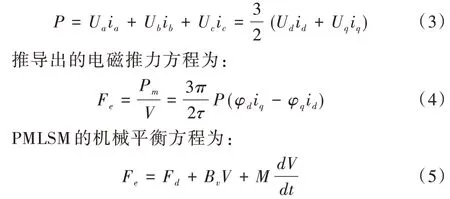
式中,φd、φq分别为d、q轴磁链;Fd、Fe分别为负载阻力和电磁阻力;Bv为粘性摩擦系数;M为PMLSM 自身质量。
根据上述数学表达式,PMLSM 结构框图如图2 所示。
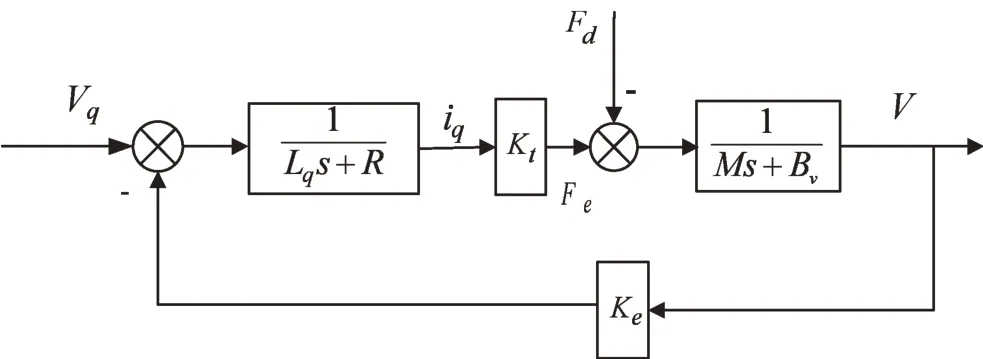
Fig.2 PMLSM structure block diagram图2 PMLSM 结构框图
2 模糊PID 控制器设计
2.1 模糊PID 控制器结构
模糊控制是将自然语言模糊化,采用模糊逻辑处理后再进行模糊化处理,以实现对对象的控制。模糊控制结构如图3 所示。
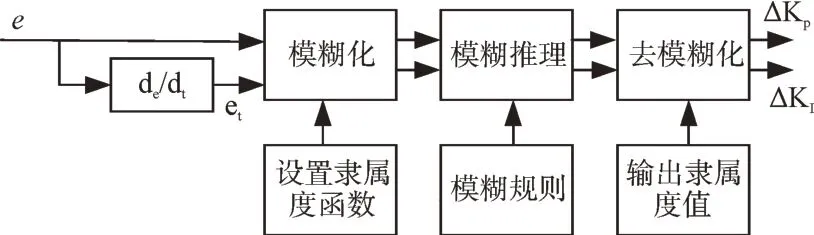
Fig.3 Fuzzy control structure图3 模糊控制结构
PID 控制的中心理论为将偏差比例以及微、积分按照一定方式的线性组合建立控制系统,如今PID 控制技术已成为工矿控制领域的核心技术之一[16-18]。对于PID 控制的数学表达,可描述为:

模糊控制思想建立在人类大脑推理、模糊性思维的基础上,其具有专家控制的经验基础,又综合了人脑推理思维的优点,在当今智能控制领域具有一定的实际意义。PID 控制特性由PID 的3 个参数确定,但其控制参数一旦设定则无法更改,这也是传统PID 控制的局限所在。为改善传统PID 控制器较为单一的特点,本文在传统PID 控制的基础上引入模糊控制,设计了一种模糊PID 控制器。通过模糊控制的隶属度函数、模糊规则等实现对传统PID 控制器的优化。其中,被控量偏差e、变化率ec分别为模糊控制器的两个输入变量,最终通过优化后的输出变量整定PID参数。模糊PID 控制器结构如图4 所示。
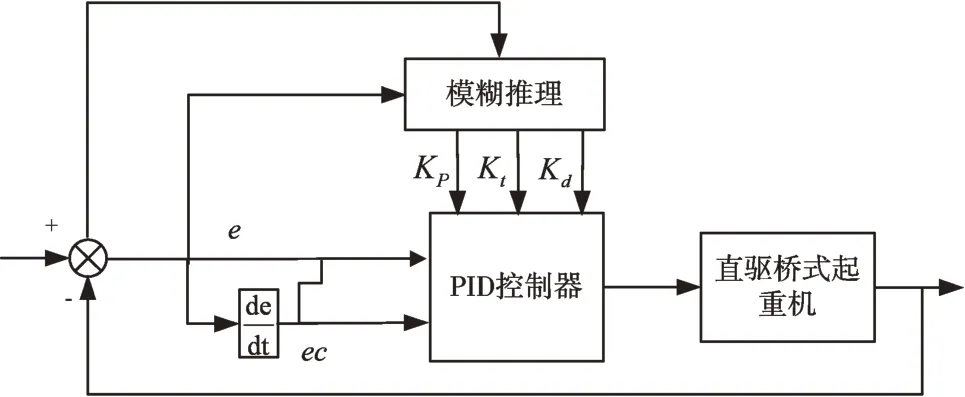
Fig.4 Structure of fuzzy PID controller图4 模糊PID 控制器结构
2.2 模糊规则确定
输入变量e、ec,输出△Kp、△KI、△Kd的模糊子集均设为{NB NM NS Z PS PM PB},隶属度函数选择三角形函数,误差论域为[-1,1]。设误差变化率ec的论域为[-1 000,1 000],本文采用Mamdani 推理规则执行模糊运算[19-20]。模糊规则如表1 所示。

Table 1 Fuzzy rule表1 模糊规则
3 系统仿真分析
为验证模糊PID 控制器对直驱桥式起重机系统性能的影响,本文利用MATLAB/Simulink 对直驱桥式起重机系统及模糊PID 控制器进行仿真。模糊PID 控制器仿真模型如图5 所示。
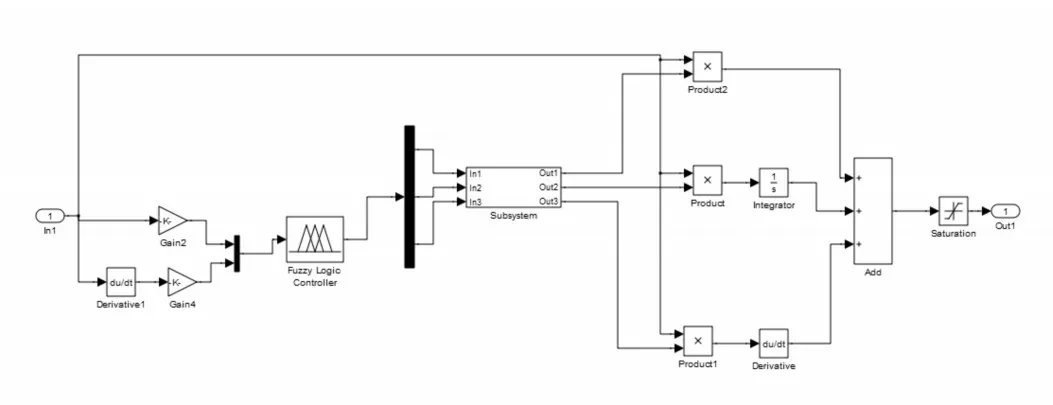
Fig.5 Simulation model of fuzzy PID controller图5 模糊PID 控制器仿真模型
所选直驱桥式起重机的驱动单元电机参数为:R=2.65Ω,φf=0.3V·s,Ld=Lq=26.7mH,τ=16mm,M=28kg,Bv=4N·s/m。在MATLAB/Simulink 中建立的基于模糊PID 控制的直驱桥式起重机系统仿真模型如图6 所示。
图7 为直驱桥式起重机在不同控制方式下的推力曲线图,仿真时间设定为0.6s。为验证系统控制特性,在0.36s时设置推力突变,将推力由1 000N 降至500N。从图中可以看出,传统PID 控制在启动初期产生的瞬时推力可达到1 485N,而模糊PID 控制产生的推力为1 250N。对比给定推力,传统PID 与模糊PID 控制下的推力超调分别为37.5%和18.9%,模糊PID 控制的直驱桥式起重机系统相较于传统PID 控制的超调量更小,在推力突变后波动小,且恢复响应更加平稳、迅速。
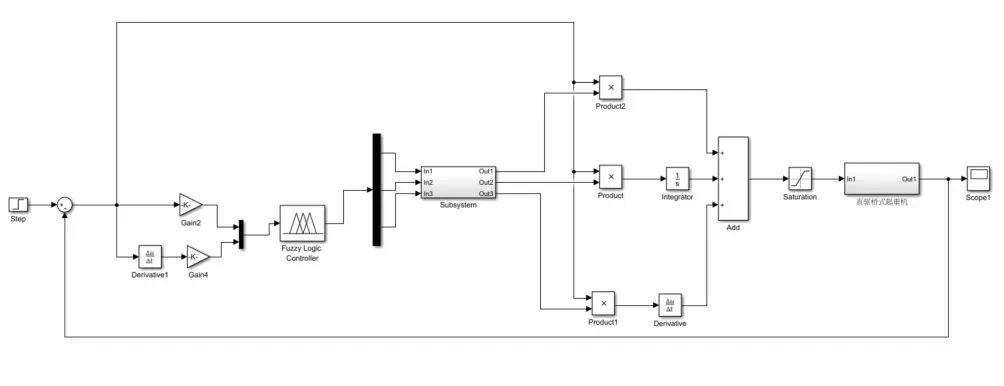
Fig.6 Simulation model of direct drive bridge crane system based on fuzzy PID control图6 基于模糊PID 控制的直驱桥式起重机系统仿真模型
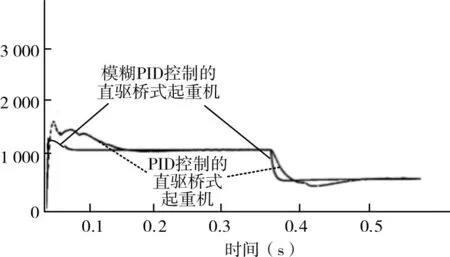
Fig.7 Thrust curves under different control modes图7 不同控制方式下的推力曲线
图8 为旋转电机和直线电机驱动在不同控制方式下的速度响应仿真对比。仿真结果显示,传统PID 控制的旋转电机驱动响应速度缓慢,超调量大;PID 控制的直线电机驱动依然存在速度超调的问题,而模糊PID 控制的直线电机驱动相较于前两者速度基本无超调、无波动,且速度上升更加平稳。
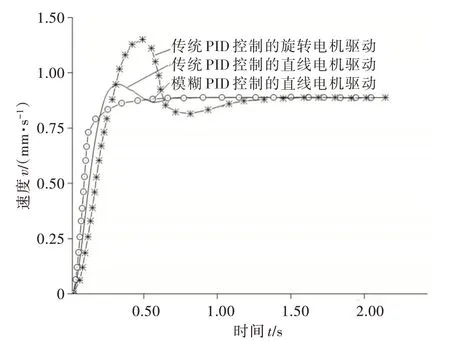
Fig.8 Speed response curves under different control modes图8 不同控制方式下的速度响应曲线
4 结语
针对传统旋转电机驱动的桥式起重机系统在运行过程中存在的噪声干扰、参数扰动、非线性等问题,本文根据直线电机直接驱动的特点建立直驱桥式起重机结构,并结合模糊控制,在传统PID 控制的基础上对桥式起重机系统进行了优化。通过在MATLAB/Simulink 中搭建仿真模型,对不同控制方式下的推力和速度响应进行仿真对比。从仿真结果可以看出,模糊PID 控制的直驱桥式起重机系统推力响应更加快速、平稳,对外界扰动的恢复能力强,速度曲线更加平滑无波动、超调量小,具有更强的鲁棒性,可为直线电机在相关领域的应用提供参考。
