基于滑动窗口的影像中建筑物特征提取方法研究∗
2021-10-27伟孙鹏翔黄恒刘思奥
孙 伟孙鹏翔黄 恒刘思奥
(辽宁工程技术大学测绘与地理科学学院,辽宁阜新123000)
从上世纪80年代起,学者们的目光就开始投向于遥感影像建筑物的提取方向,对其展开了理论研究并进行了大量的实验,针对于遥感影像的建筑物信息提取是指在遥感数据中通过相关算法[1-5],根据既定的流程在众多图像信息中准确找到建筑物的位置、属性、形状等信息[6-9]。2009年Ren K检测到遥感图像中的建筑物阴影,用盒子搜索来确定建筑物的外界轮廓信息。2010年陈杰在面向对象分类方法的基础上与空间聚变和分水岭变化相结合,他还加入了Gabor小波段用来提取Quick Bird信息,利用结合后的新方法进行分割,最后分析对象之间的空间拓扑关系来确定类别性质,该方法可提升影像分类的自动化能力,能有效利用对象各大特征。2017年林雨准等人将多尺度分割和形态学相结合提出了阴影检测方法,利用均值漂移法和分割影像,对影像进行多尺度分割后生成阴影指数矢量,对高分二号和Google Earth影像进行实验,结果表明该方法有一定抗干扰能力。高分辨率影像会存在同物异谱或者异物同谱现象,仅靠单一的技术不可避免地无法准确获取信息,基于多特征多方法结合的方法比单一的方法效果好,相对地算法流程会比单一的复杂。随着计算机发展的越来也成熟、人工智能的兴起以及多学科相互交叉[10-11],该方法在以后一定会不断突破,成为建筑物提取的主要方法。影像分割[12-14]是面向对象信息提取算法的关键,目前较为常见的多尺度分割算法在最优尺度确定好的前提下可以精确的分割影像对象,但是该方法主要应用于商业型软件中,在实际的项目中使用成本过高。论文尝试通过滑动窗口的方式对窗口内的影像对象特征进行提取与训练,在多尺度分割实验中探究最优尺度选择的问题,在滑动窗口实验中构建面向对象建筑物信息提取方案。
1 灰度共生矩阵建立
灰度共生矩阵(Gray-Level Co-occurrence Matrix,GLCM)[15]是纹理特征提取的基础,通过计算灰度图像的空间分布得到共生矩阵,根据其相关特征值代表图像纹理特征的一种统计分析方法,即通过统计某一特定的灰度值在空间中反复出现的次数,以此描述纹理特征。可用两个位置像素的联合概率密度来定义共生矩阵。
通过设二维图像水平方向与垂直方向分别有Nx、Ny个像元,定义灰度级数为k,则灰度级集合K={0,1,2,…,k-1}。取图像中任意一点记为(x,y)以及偏离它的另一点记为(x+Δx,y+Δy),设这一组点对的灰度值为(m1,m2)。将(x,y)点在图像域Nx×Ny中任意移动,则会出现k2种(m1,m2)的组合。在整个图像域中统计每一种(m1,m2)出现的个数,排成方阵,再用(m1,m2)出现的总次数将其归一化为概率P(m1,m2),此方阵记为灰度共生矩阵:
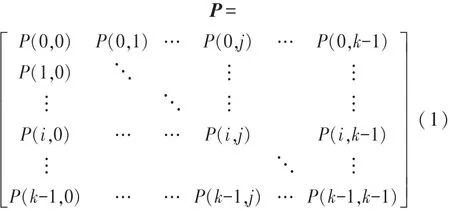
差分值(Δx,Δy)每更新一次数值,就会得到一个新的联合概率矩阵,(Δx,Δy)取值要根据纹理特征周期分布的特性来选择,对于较细的纹理,要选取较小的差分值。为了减少计算量,通常选取0°、45°、90°和135°四个方向对图像域进行扫描。当图像各位置的灰度值差异不大时,灰度共生矩阵中的各元素会集中在主对角线附近分布,当图像各位置的灰度值差异很大时,灰度共生矩阵中的各元素会较为分散。
2 基于主成分分析的灰度图像获取方法
主成分分析法主要根据正交变换原理将原始空间转化至主成分空间,把具有相关型的变量数目减少,减少数据冗余,实现数据降维。如图1所示,二维空间的黑色数据点沿M轴的方差最大,因此将其投影到M轴,将二维数据降至一维,降维后的各个主成分之间相互独立,能代表原始数据中绝大部分信息。
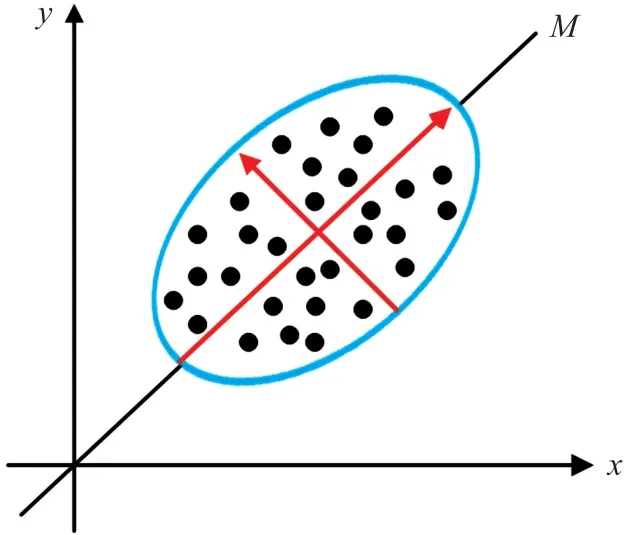
图1 主成分分析降维示意图
论文将GF1影像中的四个波段数据作为4个变量,构造协方差矩阵进行降维,并提取主成分第一分量,在多特征基础上增加第一分量特征来增加类别间的差异性,提高分类精度。
根据如图2所示主成分分析流程可得:
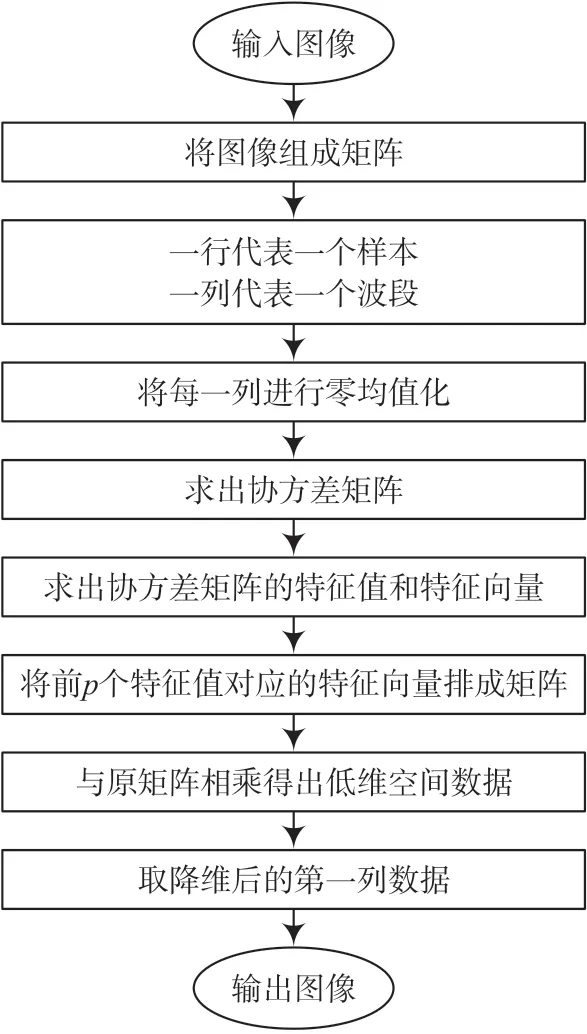
图2 主成分分析流程图
①图像矩阵零均值化。将图像排成矩阵X,其中一行代表一个像元,一列代表一个波段,p个波段(x1x2…xp),n个像元的图像矩阵X的结构如式(2)。
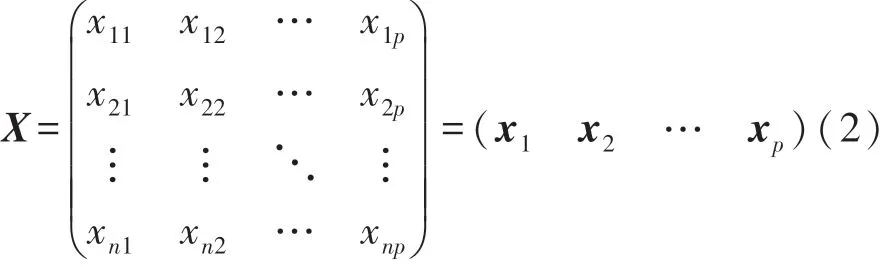
式中:xi=(xi1xi2…xip),xj=(x1jx2j…xnj)T,i=1,2,…,n,j=1,2,…,p。
将X进行零均值化处理:

②计算协方差矩阵C,即各波段之间的相关系数矩阵,求解过程如式(4)与式(5)。
③求解特征方程|λE-C|=0,计算协方差矩阵对应的特征值并按式(6)由大到小排列。

④逐个计算每个特征值对应的特征向量ki=(ki1ki2…kip),i=1,2,…,p,并排成矩阵,其中,‖ki‖=1。
⑤计算贡献率和累计贡献率。特征方程的每个特征根贡献率θ计算公式如式(7):
论文选取贡献率最高的主成分第一分量进行特征组合分析,实现数据降维,并将得到的单波段影像作为区别不同地类差异性的评价标准之一。
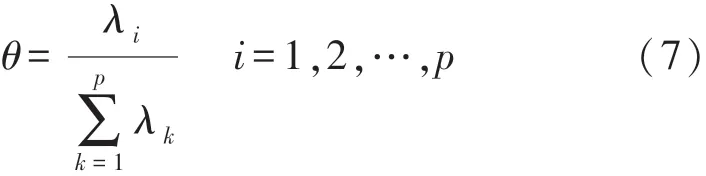
绝大多数高分辨率遥感影像都有多个波段,携带着大量的信息,并且每个波段所携带的信息都不可以随意丢弃,为了将数据损失降低到最小,论文采取主成分分析的方法将研究区的GF1_WFV1影像降维,提取主成分第一分量得到灰度图像。预处理后的影像以及主成分分析后的影像如图3所示。
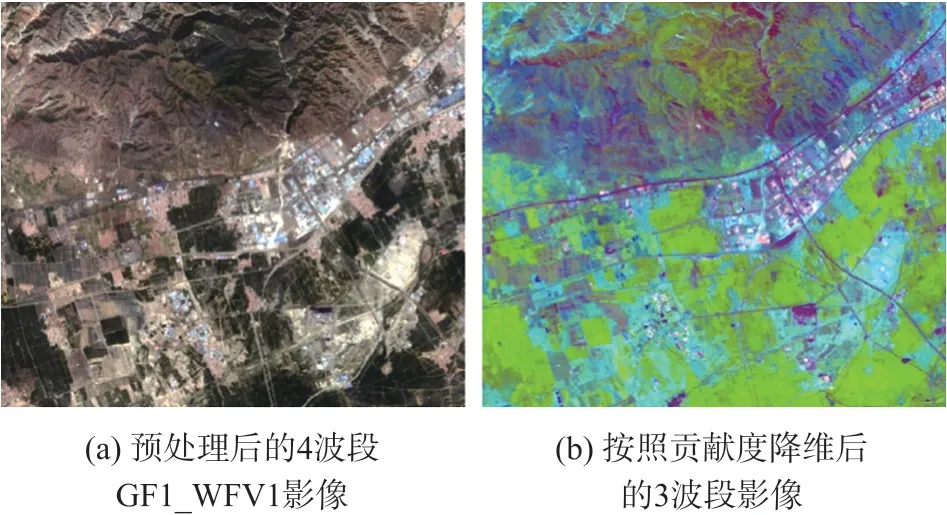
图3 预处理后的影像与降维影像
图4 为单波段的主成分第一分量、第二分量和第三分量。在获取主成分第一分量后,为减少计算量来提高算法效率,对影像进行灰度级调整至0~15之间,取整保留16个灰度级。进行灰度级缩放时将影像进行直方图均衡化处理,来增加影像的全局对比度。
图4 单波段各主成分分量
3 滑动窗口参数设置
如图5所示,滑动窗口参数主要包括窗口大小与步长。其中,窗口大小设置为5×5、步长设置为1。窗口从影像左上角开始水平滑动,先进行列遍历,滑动完整行后,行加1继续滑动,每滑动一次窗口就计算一次窗口内的纹理特征与光谱均值特征,直至整幅影像全部遍历完成,滑动停止。通过拟合的分类算法模型来预测每个窗口内的地物类别信息。
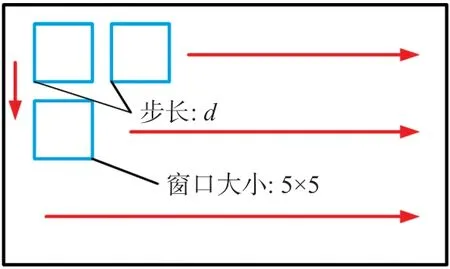
图5 滑动窗口示意图
4 单窗口纹理特征值获取
GLCM虽然可以描述纹理,但是不可以对纹理进行深层次分析,因此Haralick等人相继用灰度共生矩阵提出了14种统计函数,即为灰度共生矩阵特征值。其中多个统计函数之间存在数据冗余,为了简化计算,用四个应用最广泛的特征值来提取影像对象的纹理特征。
①角二阶矩(Angular Second Moment,ASM)又称为能量,是图像灰度分布均匀程度和纹理粗细的一个度量,反映图像灰度分布均匀程度和纹理粗细度。当图像纹理均一规则时,能量值较大;反之灰度共生矩阵的元素值相近,能量值较小。
②熵(Entropy,ENT)度量了图像包含信息量的随机性,表现了图像的复杂程度。当共生矩阵中所有值均相等或者像素值表现出最大的随机性时,熵最大。

③对比度(Contrast,CON)反应图像的清晰度和纹理的沟纹深浅。纹理越清晰反差越大对比度也就越大。

④反差分矩阵(Inverse Differential Moment,IDM)反映纹理的清晰程度和规则程度,纹理清晰、规律性较强、易于描述的,值较大。

5 实验结果与分析
由于灰度共生矩阵的计算全部以矩阵为单位,因此计算影像对象纹理特征时所需要的计算量非常大,计算中产生的冗余会大量消耗电脑内存,因此在研究区选择时,截取预处理后的内蒙古自治区GF1_WFV1影像中的一小块区域进行信息提取研究。GF1_WFV相机为多光谱相机空间分辨率为16 m,分辨率较低,同时研究区域有大量林地、耕地,非建筑物较多,地物相对简单数据处理量小,以便快速得出实验结果。预处理后的研究区影像如图6所示。
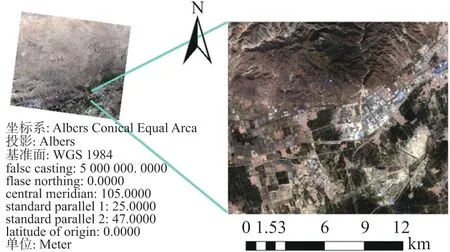
图6 研究区影像参数信息
分别采用多尺度分割和滑动窗口算法对建筑物信息的提取,并在算法使用成本、准确度两个方面进行比对分析。

表1 精度评价
在算法使用成本方面,多尺度分割的建筑物信息提取结果在易康商业遥感软件中操作得出,图7(a)中十字丝为样本点的选取位置。由于选取的影像是分辨率16 m的GF-1影像,不同地物边界较为模糊,所以使得多尺度分割在不同地物的边缘区域分割的过于细碎,依赖于分割后的人工后处理操作,将影像对象进行人为勾画与修改,人力成本过高。此外,易康软件缺乏影像预处理操作,与此商业机构合作困难,因此在实际项目中的使用成本较高;反之滑动窗口的应用场景要广泛得多,图8中滑动窗口的提取过程通过Python语言实现,只需要配置GDAL,OpenCV,Scikit-learn模块即可在终端中运行,此外算法可以进行封装,在信息提取的系统中调用,在实际项目中使用成本较低。
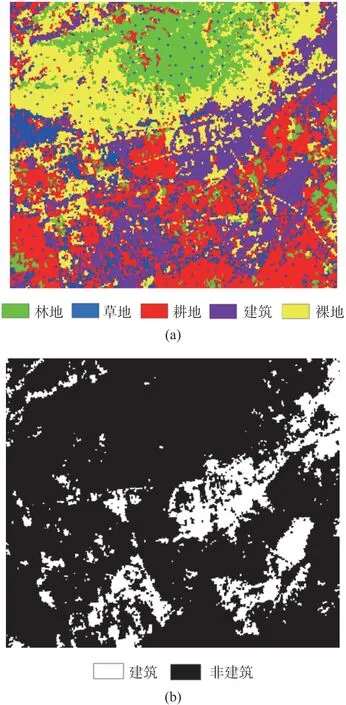
图7 多尺度分割提取结果
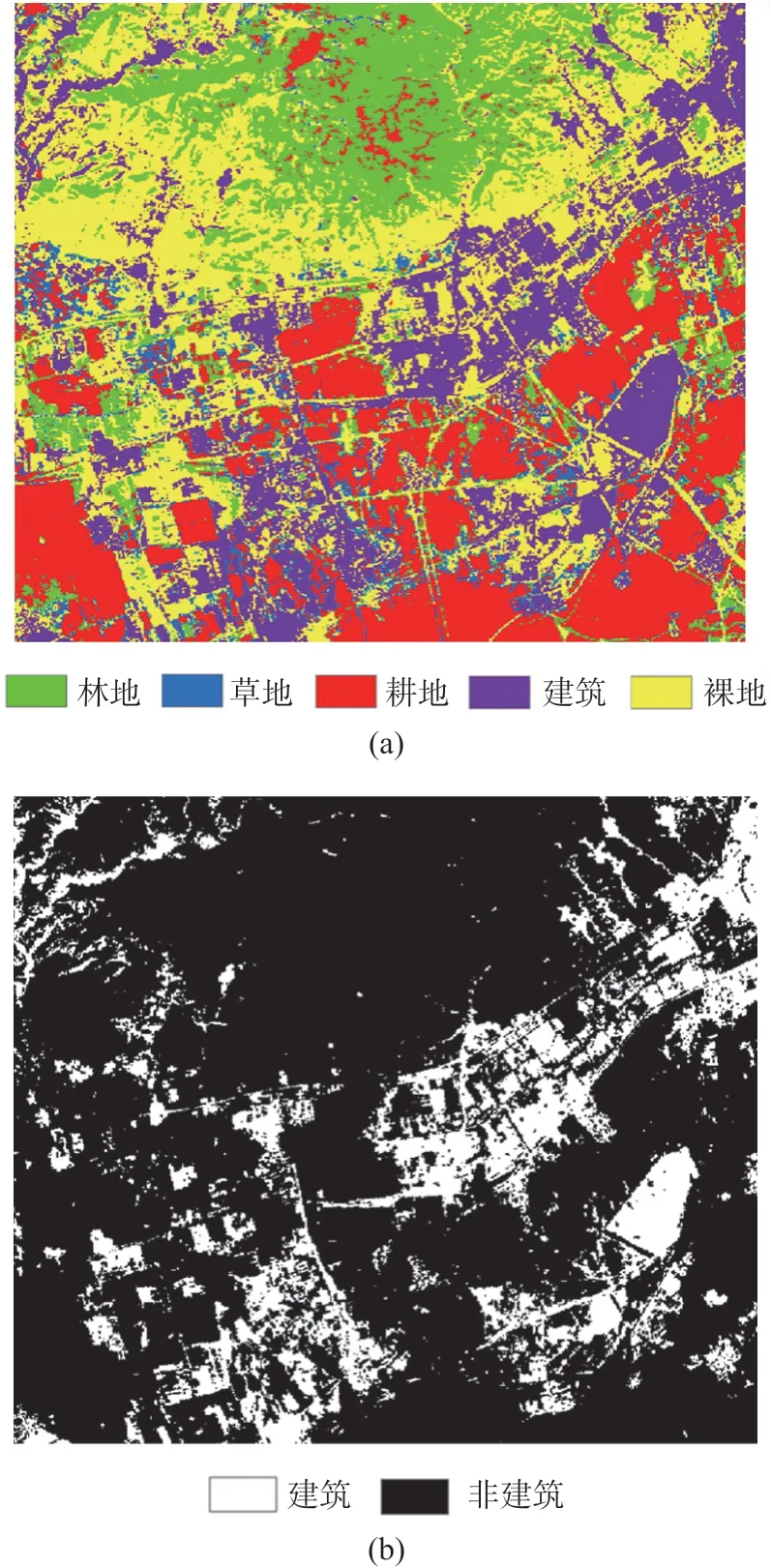
图8 滑动窗口提取结果
在准确度方面,根据表的精度评价结果显示,多尺度分割方法的总体精度为84.73%,Kappa系数为0.698 1;滑动窗口方法的总体精度为85.67%,Kappa系数为0.698 1,两种方法的建筑物提取结果均有极高的一致性。其中滑动窗口提取结果的总体精度比多尺度分割提取结果的总体分类精度高出0.94%,Kappa系数高出0.012 5,因此在准确度方面两种方法的提取精度较为相似。
综合算法使用成本和准确度两个方面的分析,在后续的建筑物信息提取实验中,将运用滑动窗口方法进行面向对象的建筑物信息提取。
6 结论
通过主成分分析进行数据降维,获取主成分第一分量,缩放第一分量灰度级,为滑动窗口纹理特征的计算提供数据输入;通过灰度共生矩阵计算单窗口内特征值,计算四个最常见的纹理特征;利用纹理特征结合光谱均值特征构建面向对象的建筑物信息提取的实现方案,得出滑动窗口的建筑物提取结果,并与多尺度分割的提取结果进行评价参数对比,在算法使用成本和准确度两个方面进行分析;结合影像对象的光谱特征和纹理特征,设计基于多尺度分割和滑动窗口的面向对象建筑物信息提取实验。实验结果表明,滑动窗口的建筑物提取方法精度略高于多尺度分割,且对于商业性软件无依赖性,使用成本低。
