一种基于边缘方向连续性的车道线快速检测算法∗
2021-10-27化春键潘瑞陈
化春键潘 瑞陈 莹
(1.江南大学机械工程学院,江苏 无锡214122;2.江苏省食品先进制造装备技术重点实验室,江苏 无锡214122;3.江南大学物联网工程学院,江苏 无锡214122)
直线特征是图像重要的几何特征,对直线的检测也是机器视觉中的经典问题,在视频跟踪,相机标定,位姿估计和目标识别等很多领域都有应用。在汽车领域中,从高级驾驶辅助系统ADAS[1]到完全意义上的无人驾驶[2],都离不开车道直线的检测与识别,为汽车行驶提供路径信息并且对偏离路线做出预警。
传统的车道线检测方法主要分为基于特征的分割方法[3]和基于模型的分割方法[4],分别利用车道线颜色,梯度,纹理等特征或者建立车道线空间模型的方式实现车道线的精确检测定位。这其中最为经典的方法是基于Hough变换检测车道[5],文献[6]基于车道线边缘点梯度特征,统计梯度直方图并优化了Hough变换算法提高了检测速度。文献[7]基于几何矩采样获取动态感兴趣区域,利用车道线段的质心与偏转角度动态估计下一段车道线位置,缩减了直线检测搜索空间,提高了检测速度及鲁棒性。传统的车道线检测研究中常采用先二值化图像再边缘检测的方法得到较少的边缘信息,但是由于二值化阈值选择不确定性,对于复杂环境下,例如艳阳天多阴影区域,雨天积水区域等,难以选择合适的阈值分割得到车道线边缘,容易出现车道线分割不足或过分割问题,并且传统Hough变换在复杂环境下也很难保持较好的实时性。随着深度学习[8-9]技术的发展,通过训练合适的神经网络[10-11]检测车道线信息鲁棒性强,然而其计算复杂,对硬件设备要求较高。
为了准确且快速的识别出复杂道路环境中的车道线,本文根据Lab色彩空间对黄色敏感性特点,实验选择合适的阈值与灰度图像加权;根据车道线边缘方向连续性特点,选择合适的掩膜窗口上下沿边缘掩膜窗口遍历图像,筛选车道线边缘;再根据轮廓删选后边缘轮廓的集中性特点,改进Hough变换扫描方式,通过迭代去点的方法提高算法速度,并利用消失点[12]原理进一步筛选直线。
1 图像预处理
1.1 基于先验ROI划分
通过对平行道路安装的车载相机采集到的图像分析可知,采集图中包括道路平面信息,及天空、道路两旁的树木、建筑等干扰信息。因此在进行车道线检测之前,必然要首先选择合适的检测区域。如图1所示,道路信息处于图片的下方区域,故选择图片下方区域当作感兴趣区域[13]进行进一步的图像处理。

图1 感兴趣区域裁剪图
1.2 对比度增强
在光照较差的多阴影图像中,黄色车道线区域模糊不清,往往很难被检测。本文针对这种现象,根据Lab色彩空间b分量对黄色敏感度高的特点,选择加权阈值增强灰度图像,增强车道线对比度。图像增强算法步骤如下:
①将采集图片灰度化,计算图像坐标系上(x,y)的灰度值gray;
②将RGB图像转化成Lab图像,并且提取b分量值b0;
③选取加权阈值w,得出增强后图像f,如式(1)所示:

式中:w为加权阈值,gray为灰度图像,b0为b分量图像,f为增强图像。经过实验表明,w为0.6时图像效果最好,增强了黄色车道线区域对比度,也不影响其他区域的正常检测,结果如图2所示。
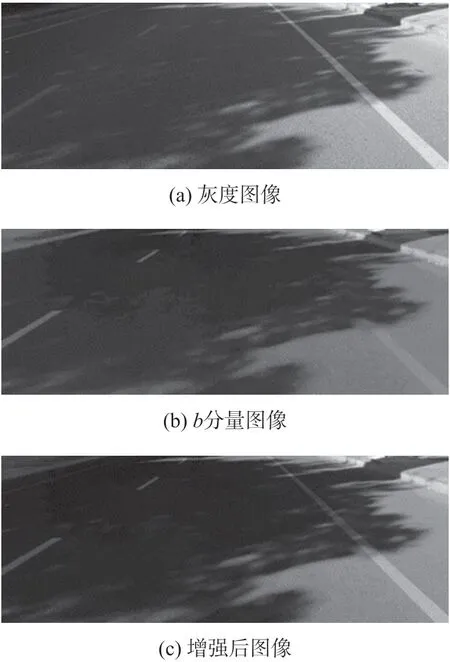
图2 对比度增强效果图
2 边缘轮廓提取
在复杂光照环境中,由于光照不均匀、反光、阴影等问题,很难把车道线从路面背景中分割出来。为了避免二值化图像后车道线分割不足导致的漏检测问题,本文直接对灰度图像进行边缘检测,得到冗杂但完整的图像边缘信息。如图3所示,在光照稳定、多阴影、障碍物干扰等情况下,车道线边缘信息皆呈现连续且方向相同的特点,基于此特点将边缘分为上升点,下降点,一般点三种情况,分别对三种边缘点分析。
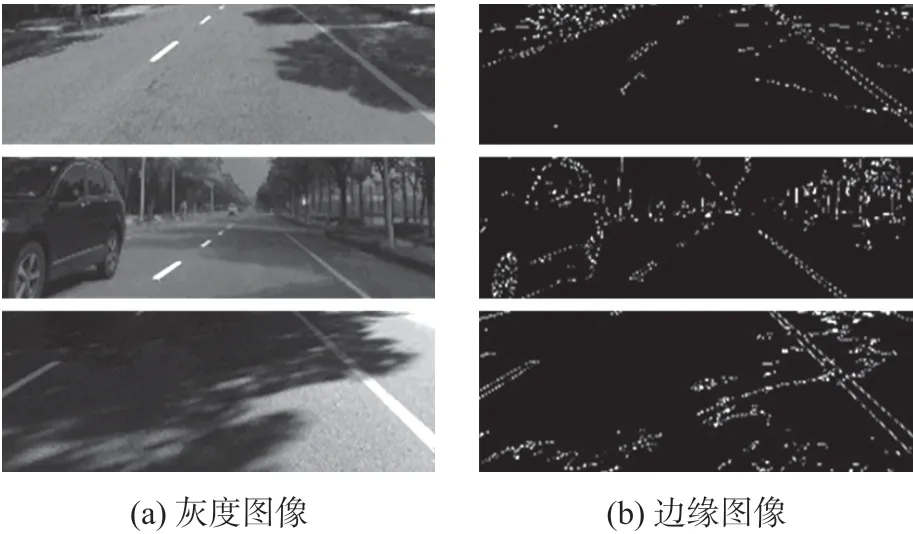
图3 边缘检测图
如图4所示,在边缘图像中,将由7种上升点组成的连续线段标志成上升车道线,将由7种下降点组成的连续线段标志为下降车道线,而2种一般点既有可能存在于上升车道线中,又有可能存在于下降车道线中。
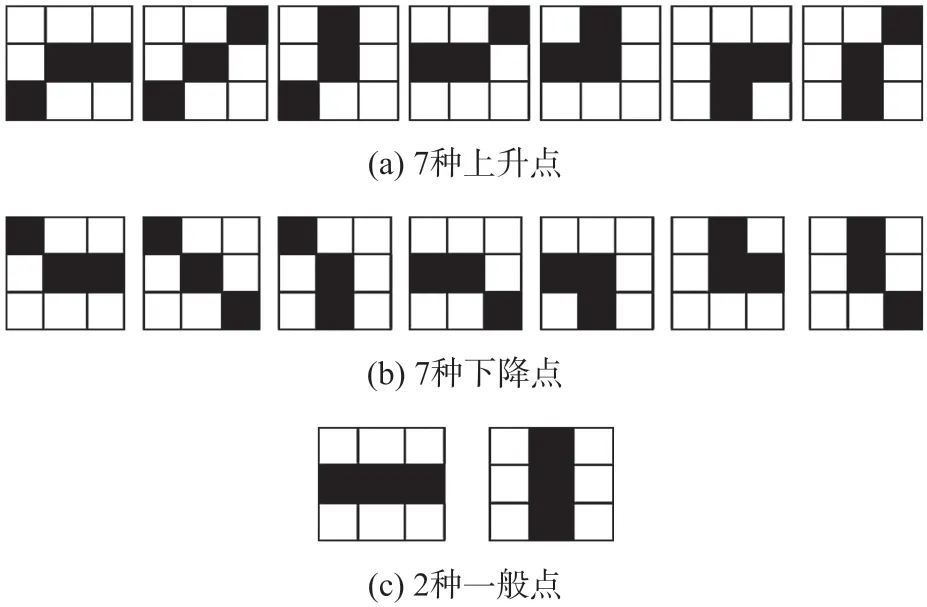
图4 边缘方向分析图
经过实验,选择如图5的掩膜对边缘点情况进行量化,对该点的上升性、下降性进行描述。两种掩膜都包含3个整十元素和3个个位元素,无论是上升点还是下降点,其邻域内必包含一个或多个整十元素,也必包含一个或多个个位元素。取边缘点3×3邻域与边缘模板卷积的结果作为该边缘点梯度方向响应值,则7种上升点与上升滤波模板卷积响应值为:31,33,32,13,12,21,23;7种下降点与下降滤波模板卷积响应值为:31,33,32,13,12,21,23;2种连接点响应值为:11,22。因此,可选用合适判定准则区分上升边缘与下降边缘。
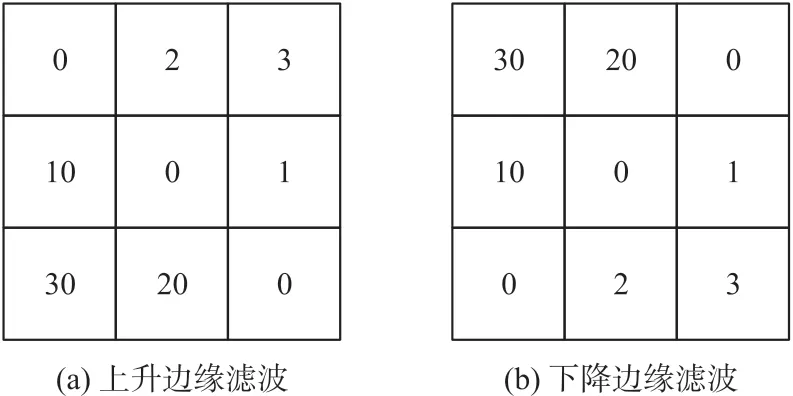
图5 滤波模板
故对边缘点筛选的步骤如下:
①从中间将图像均分为左、右两个子图像。其中上升沿的车道线位于左图像,下降沿的车道线位于右图像;
②遍历左图像每行每列,选择3×3的邻域与图5(a)卷积,若值大于11且不能被10整除,则将此点置为1,定义此点为上升点,否则置0,定义此点为干扰点;
③遍历右图像每行每列,选择3×3的邻域与图5(b)卷积,若值大于11且不能被10整除,则将此点置为1,定义此点为下降点,否则置0,定义此点为干扰点。
经过筛选后,左右图像中车道线边缘上的点仍具有较好的连通性,而非车道线的边缘线皆断开,分割成了一个个特别小的连通区域。对筛选后图像进行区域生长处理,选择合适的阈值删除小连通区域。此时连通域较大的线段即可能为车道线线段,不排除存在误检测直线的可能,可结合车道线倾斜角度和位置信息等特征对检测车道线进一步约束。
3 车道线拟合
3.1 曲直判定
直线和曲线是常见的两种车道线形状,本文采用Hough变换与最小二乘法分别对直线轮廓、曲线轮廓进行拟合。在进行车道线轮廓拟合之前,应该对检测到边缘轮廓进行曲直判定,然后将轮廓选择合适的方式进行拟合。如图6所示,Pm是轮廓P1P2的中点,而对于理想直线P′m与Pm应该重合,而对于曲线来说,P′m与Pm的位置会有一定的偏差,因此,本文采用P′m与Pm之间的距离作为检测轮廓边缘是曲线或是直线的判断依据。
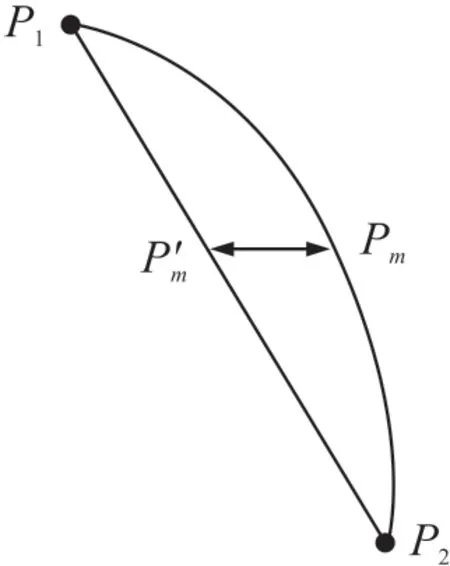
图6 曲直判定示意图
3.2 基于改进Hough变换的直线拟合
Hough变换是一种常用的模型识别方法,常用检测直线,圆等形状特征,通过建立图像空间和参数空间的对应关系,图像空间中一个点对应参数空间一条线,图像空间一条直线对应参数空间中一个点,其极坐标表示为:

式中:ρ表示原点到直线的垂直距离;θ表示直线与x轴夹角,(x,y)为像素点坐标。传统的Hough变换遍历所有像素点,建立(ρ,θ)累加器,采用投票的方式选出峰值。然而在复杂环境下,由于边缘点冗杂,投票累加的过程占据大量计算资源。
基于以上缺点,本文提出一种改进Hough变换方法,提高车道线检测速度。首先根据先验知识限定车道线极角、极距范围,经过对大量车道线图像统计分析可知:

式中:θl,θr分别为左右两个车道线极角,m,n为图像的长和宽。
其次,根据上文得到的去除不连续小边缘后的左右轮廓图,建立新的像素点扫描方式,迭代删除已测直线上点,流程如图7所示,具体步骤如下:

图7 改进Hough变换流程图
①经过边缘轮廓分割后,将各边缘轮廓按从大到小排序得contours[i],i=1,2,3,…,contours[1]为做图像最长的边缘;
②建立累加器,从contours[i]开始对(ρ,θ)单元投票累加,首次迭代i=1。设定阈值T,若A(ρ0,θ0)>T时,即检测到一条长为T的小直线,转步骤3。否则等所有点集累加完成,跳转步骤4;
③遍历所有点集其他所有轮廓点(x′,y′),若x′cosθ0+y′sinθ0=ρ0,则点(x′,y′)位于小直线上,A(ρ0,θ0)=A(ρ0,θ0)+1,并从点集中剔除此点。迭代完成后,记录(ρ0,θ0)为检测到的一条直线,并将A(ρ0,θ0)置0,并返回步骤2,i=i+1;
④记录左右图像所有检测到的直线,并根据平行车道线在图像中交于一点,筛选出正确的车道线。
3.3 基于最小二乘法的曲线拟合
本文采用最小二乘法拟合曲线,将曲直判定后的曲线轮廓拟合成数学曲线。由于本文获得的曲线轮廓干扰点少,利用最小二乘法可使车道线拟合具有较高的精度和实时性。假设最小二乘法拟合多项式如式(4)所示:

式中:a0,a1,…,ak,为对应项系数,(x,y)为待测点坐标,各点到这条曲线距离平方和的数学表达式如式(5)所示:

式中:R2为偏差值,当其值最小时,拟合效果最好,故分别对ak求偏导并化简为矩阵形式:

式中:
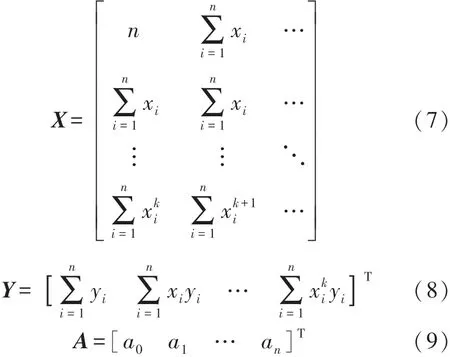
本文采用最小二乘法对曲线车道线进行曲线拟合,根据曲线的形状选择三次多项式y=a0+a1x+a2x2+a3x3拟合车道曲线,因此需求解出[a0,a1,a2,a3]四个未知量。
4 实验测试
为验证本文提出的车道线检测方法鲁棒性和实时性,本文验证环境为:Intel(R)Core(TM)i7-8750H,8G内存PC机,Win10操作系统,开发环境为VS2015配置opencv3.3.0。
4.1 车道线分割实验
在图8(a)的车道线图像中,除了车道线信息外,还包含路旁树木、路灯等干扰,通过边缘检测可以获得清晰边缘轮廓,结果如图8(b)所示。边缘检测图像具有完整图像边缘信息,其中包括车道线轮廓信息和道路旁树木、路灯等冗余信息的边缘轮廓。这些冗余的边缘轮廓不仅增加了车道线检测算法的计算量,也对车道直线、曲线拟合过程造成一定程度干扰。
根据车道线边缘梯度连续性特点,选择合适掩膜遍历所有边缘点,删除方向不连续的边缘点,中断不规则冗余干扰信息的轮廓边缘,而车道线边缘轮廓仍保持较高的连续性,如图8(c)所示,路边路灯、树丛干扰信息边缘轮廓断裂成一个个短小的片段,而路面上连续的车道线边缘轮廓仍保持较大的长度。统计每个8连通边缘轮廓尺寸,删除较小尺寸的边缘轮廓,保留较长边缘轮廓拟定为车道线边缘,结果如图8(d)所示。
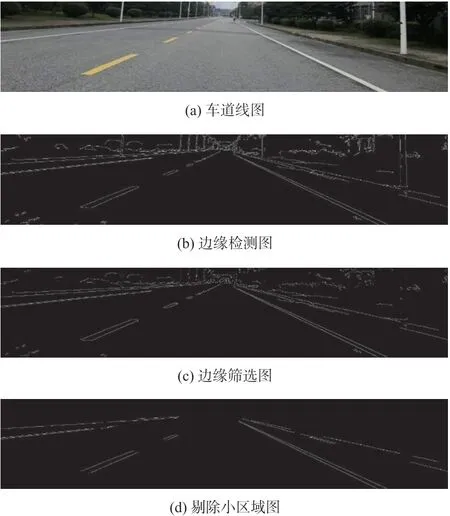
图8 车道线轮廓分割效果图
图9 为弯曲车道线轮廓分割效果图,由图可知,弯曲车道线经过滤波模板筛选后,车道线轮廓仍保持较高的连通性,可从路面背景中分割出正确的弯曲车道轮廓。
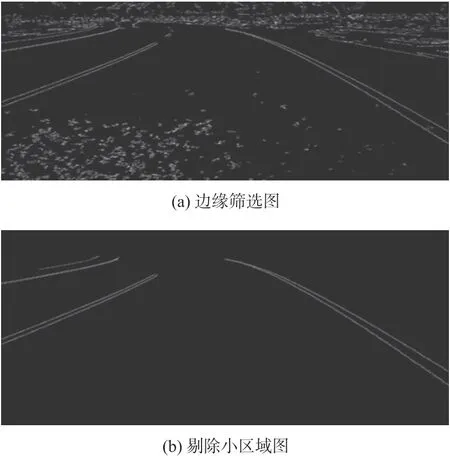
图9 弯曲车道线轮廓分割效果图
从图8、图9中可以看出,本文方法根据车道线方向连续性的特点,可以从复杂的边缘轮廓图中寻找出正确的车道线边缘。车道线边缘保持较高的完整性,其中,车辆所在车道区域的车道线边缘表现为具有一定距离的两条平行线,而距离车辆所在车道较远的车道线边缘由于相机分辨率的限制表现为一条线或距离较近的两条平行线。
4.2 对比实验
为验证本文算法在复杂光照环境中的鲁棒性和实时性,选取了正常光照,昏暗光照和阴影光照下图像进行测试,与文献[14]算法相比较,结果如图10~图13所示:
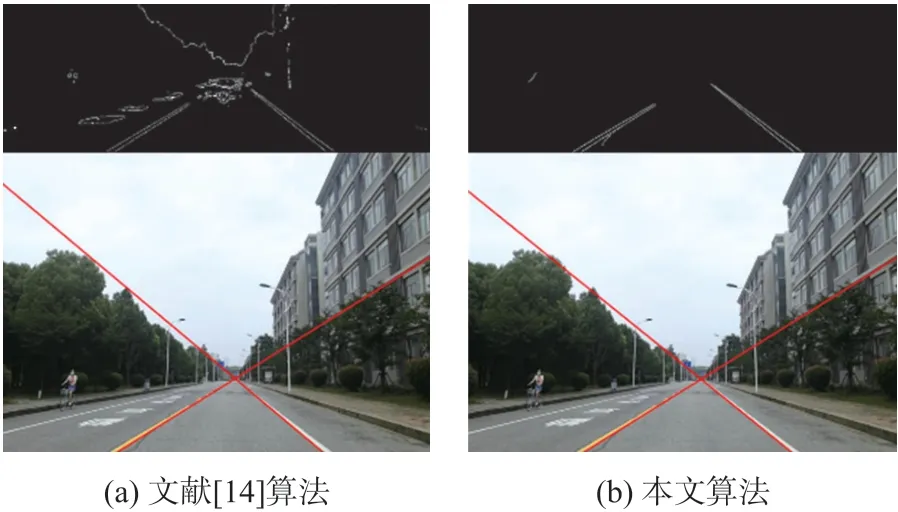
图10 正常光照
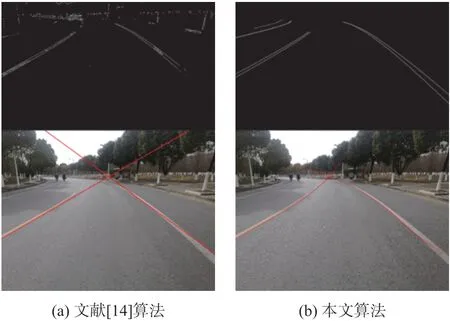
图13 曲线拟合实验
文献[14]首先采用自适应阈值分割技术将车道线区域与路面背景分割,再检测边缘轮廓进行Hough变换检测车道线。如图10、图11所示,在正常光照及昏暗光照下,阈值分割后的车道线边缘保持完整,足以检测出直线。然而当光照不均,或受到
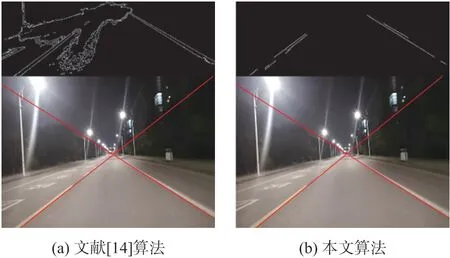
图11 昏暗光照
阴影干扰时,往往无法选择合适的阈值分割出车道线,容易造成车道线信息丢失,如图12所示,左侧明亮域区域车道线信息丢失。本文直接从灰度图像中检测边缘,得出完整的图像轮廓,再基于连续性原则筛选出车道线,如图10~图12所示,在正常光照,昏暗光照及阴影干扰下都能较好的检测效果。
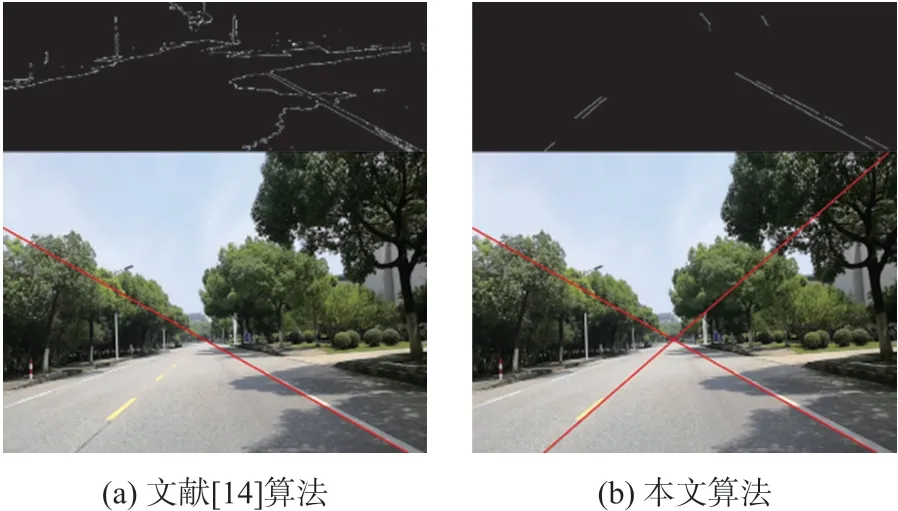
图12 阴影光照
此外,文献[14]仅采用Hough变换拟合直线,将曲线也当成直线拟合,弯曲车道线拟合精度较差,本文采用最小二乘法拟合车道线轮廓,拟合精度较高,结果如图13所示。
由于ROI划分与Hough极角约束相关参数与相机拍摄高度、角度有关,本文采用相机水平拍摄方案,相机距地面1 m,分别采集正常光照、昏暗光照和阴影干扰等3类光照环境下各500帧路面图像进行测试,统计数据如表1所示。
由表1可知,与文献[14]相比,本文算法在正常光照及昏暗光照下鲁棒性和实时性上有一定的提高,在复杂阴影光照下,由于避免了因为背景复杂导致的车道线漏分割和边缘点冗杂问题,识别率从90.6%提高到96.4%,时间从45.2 ms提高到25.4 ms。本文算法平均识别率达到97.1%,平均用时22.9 ms。结果表明,本文所提算法抵抗干扰性能良好,能适合各种复杂光照环境,具有较高的辨识正确率,且满足实时性要求。

表1 车道检测时间与精度对比
4 结论
本文提出一种基于边缘方向连续性的车道线快速检测算法。首先,采用Lab色彩空间b分量与灰度图像加权的方法,使车道线在明亮区域、昏暗区域皆有较高的对比度,降低了黄色车道线漏检率。针对二值图像存在车道线漏分割的缺陷,采用边缘连续性筛选分割出正确车道线轮廓,并采用Hough变化和最小二乘法拟合车道线。经过不同光照环境下实验测试,本文算法平均识别率达到97.1%,平均用时22.9 ms,尤其在阴影干扰下,识别率提高5.8%,速度提高43%。因此,本文所提出算法具有较高的普适性,且满足实时性要求。
