控制点布设方案对无人机精度测量的影响及其应用
——以西北地区某尾矿坝地表沉降监测为例
2021-10-27魏冠军
戴 嵩,魏冠军,梁 斌
(1.兰州交通大学测绘与地理信息学院,甘肃 兰州 730070;2.地理国情监测技术应用国家地方联合工程研究中心,甘肃 兰州 730070;3.甘肃省地理国情监测工程实验室,甘肃 兰州 730070)
0 引言
近年来,矿区地质灾害愈发严重,其中尾矿坝由于堆放工业废渣及废弃物,具有高势能,存在人造泥石流溃坝危险[1]。矿山环境污染是采矿活动引发的主要环境问题之一,基于尾矿坝严重的安全隐患,世界上很多国家把对尾矿坝的安全监测列为国家劳动部门安全监察的重要内容[2−4]。当险情发生时,由于灾区环境风险,常规的监测手段无法及时获取灾情。无人机同现有的常规手段相比,可以解决灾情勘察人员由于安全隐患无法接近灾区的问题,能够速获取空间要素,具有高精度、高时效、低成本的优势,是一种快速部署、零伤亡的灾情获取技术手段[5−9]。利用无人机遥感监测地面空间要素一直是学者们关注的热点。文献[10]进行了单相机无人机航摄试验,并开发了相应的地面监测软件;文献[11]对辽宁省某市铁矿开采区域进行了无人机动态遥感监测;文献[12]利用无人机摄影测量监测程潮铁矿西部塌陷区的地表塌陷变形。文献[13]利用无人机影像对云南省滇东北地区滑坡的活动性、发生发展过程进行监测,分析山体滑坡体特征。文献[14]以锦屏二级水电站出线场边坡落石灾害所在区域为例,将无人机摄影测量技术应用于高陡边坡危岩体调查中。随着无人机技术应用范围越来越广泛,这为尾库坝监测防灾及精细测量提供一种新思路。
采用无人机技术进行沉陷监测具有非接触性,大面积采集监测数据的优点。获取高精度的成图是无人机监测的保证。本文基于无人机低空摄影测量获取的航摄照片,经POS(Position and Orientation System)数据误差纠正,选取合理的像控点布设方案,利用获取的尾矿坝高分辨率两期DEM(Digital Elevation Model)数据进行尾矿坝沉降变形分析,对0~120 m,Y=0~700 m地表高程主要分析区域的变化情况做剖面分析,精度符合实际要求,为实际工况下无人机低空摄影测量提供参考,具有一定工程应用价值。
1 无人机低空摄影成图方法
无人机低空摄影测量是对地面监测的一种新型手段。无人机采集地表信息的一般流程有航线规划、布设像控点和提取信息,它通过获取高清晰度航摄影片,获取POS数据,联系地面控制点,利用畸变改正等方法,经过空三解算,获取高精度DEM数据以及高分辨率正射影像[15−16]。无人机低空摄影测量获取的航片需要确定投影坐标以及DEM数据网格间距,精度越高则分辨率越高[17]。基于无人机低空摄影测量的尾矿坝地表沉降主要技术流程如图1所示。

图1 无人机监测应用流程Fig.1 UAV monitoring application process
2 无人机航测影像POS数据系统误差分析
改正模型纠正原始POS数据系统误差。无人机飞行时的6个外方位元素Xs,Ys,Zs, Φ, Ω,K是由共线方程反算
无人机低空摄影测量有一定的系统误差,对数字摄影测量精度造成影响的原因有很多种,但是最重要的是相机的分辨率;相机拍摄时存在的安置误差;原始POS数据系统误差[18]。通过设计合理的航飞方案可以提高影像质量,提高航片的重叠度减少误差,建立误差得到,这是摄影测量的一个基本问题[19−20]。共线方程的建立如式(1):
式中:x0,y0——像主点;
x,y——以像主点为原点的像平面坐标;
∆x,∆y——相机畸变改正数;
f——像片主距;
Xs,Ys,Zs——外方位线元素;
X,Y,Z——物点的地面坐标;
a1,a2,a3,b1,b2,b3,c1,c2,c3——旋转矩阵的9个元素。
通过地面控制点反算获取影像精确的外方位元素,得到POS数据误差的改正参数,建立两种针对单张相片和多张相片的误差改正模型。其中单张相片误差改正公式如式(2):
式中:XPi,YPi,ZPi, ΦPi, ΩPi,KPi—原始POS数据的外方位元素;
Xi,Yi,Zi, Φi, Ωi,Ki—地面控制点反算获取的外方位元素;
i—表示计算的影像张数,i=1,2,···,n;
∆XPi, ∆YPi, ∆ZPi, ∆ΦPi, ∆ΩPi, ∆KPi—表示第i张影像外方位元素的改正值。
如果选取多张相片进行误差改正,则误差取平均值计算多张相片误差改正公式如式(3):

通过改正模型纠正原始POS数据误差如表1所示。
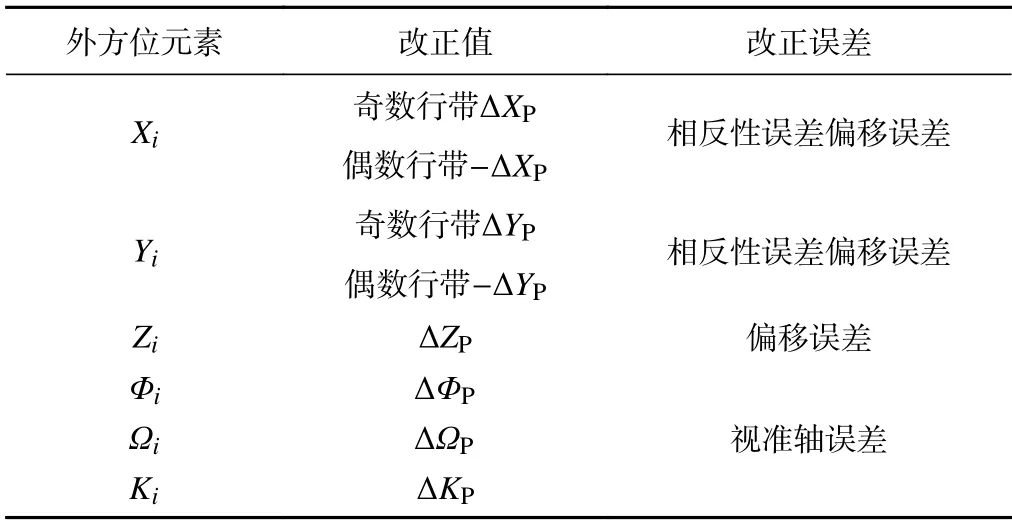
表1 外方位元素的改正值和误差来源Table 1 Correction values and error sources of elements withexternal orientation
3 实验区概况与控制点布置方案
3.1 实验区概况
本次实验区深处亚欧大陆腹地,地形地貌复杂,气候干旱少雨,绿洲生态维持主要依赖高山雨雪形成的河流。尾矿坝较多,属典型的山谷型尾矿库。其中研究区尾矿坝具有高势能的人造泥石流危险源,一旦溃坝容易造成特大事故和河流污染,对矿区的安全及其它方面也会产生一定影响。尾矿坝位于图2所示的研究范围内,尾矿坝用于存放工业废渣,而且在进行数据采集之前就已经出现过部分边坡的滑落。因此需要对尾矿坝进行无人机摄影测量监测,通过数据分析判断边坡是否再次出现滑坡灾害,以确保矿区地质安全[21−22]。

图2 实验区研究范围Fig.2 Research scope of the experimental area
3.2 控制点布置方案
为获取实验区无人机影像,设计合理的飞行方案,分别在2018年8月2日及2019年8月5日采用固定翼和多旋翼无人机对实验区进行航拍,获取两期原始航片数据。为了保证生成具有高精度的DEM,飞行前在地面做好控制点并记录其大地坐标,将控制点清晰记录在影像上。无人机飞行参数设置相对航高为95 m,航向重叠度为85%,旁向重叠度为80%。在完成航摄后,应对照片进行质量检查,主要包括:照片的清晰度和重叠度,有没有航摄漏洞,航摄区域与需要观测区域的覆盖情况。如果在检查时发现有些照片不符合要求,进行补飞,以免影响后续处理的精度[23]。
控制点的选取和布设可以保证低空摄影测量的精度。做空中三角测量需要布设的地面控制点和检查点进行区域网平差[24]。采用高精度水准仪按照一等测量规范在实验区域架设仪器获取两期尾矿坝区域控制点高程数据,高精度全站仪获取控制点点位数据。实验区主要为尾矿坝区域,矿区两侧有山路环绕,便于行走及架设仪器。因此以尾矿坝为主要区域,然后沿矿区两侧山路在路边进行布设控制点。
针对控制点数量对成图的精度影响问题,在第一次航拍前实验选取最佳控制点数量提高成图精度。参考“均匀布设原则”,按照控制点依次增加2个,最后累加到14个的7种控制点布设方案。建模时,把用全站仪及水准仪测量的对应控制点坐标及高程输入到软件中,并且把纠正过的POS数据输入到Pix4Dmapper软件中,建立对应的三维立体模型。对生成的模型进行分析,读取不同控制点布设方案下各控制点的坐标,比较平面及高程精度。经过处理的7种控制点布设方案的数据误差如图3所示。

图3 7种布设方案的控制点误差Fig.3 Control point errors of seven layout schemes
由图3可以看出,随着控制点数量的增加,数据精度也在逐渐增加,数量到达8个之后,精度逐渐降低并趋于稳定,所以此次尾矿坝控制点数量选取为8个,数据精度达到最高。
将原始外方位元素代入控制点坐标进行反算,利用Matlab软件设计系统误差改正模型计算出POS数据改正参数,然后对原始POS数据进行改正。选取第一期部分影像原始POS数据与纠正后POS数据对比如表2所示。

表2 原始POS数据与纠正后POS数据对比Table 2 Comparison of original POS data and corrected POS data
由表2可以看出改正的外方位元素精度得到提高,生成的正射影像及DEM数据相对提高。此次获得的原始POS数据精度较高,经区域网平差后,线元素误差在0.1 m以内,角元素误差在1 °以内,但还是满足不了沉降观测高精度的要求,所以需要纠正POS数据提高精度。用Pix4Dmapper软件进行后续处理生成正射影像与DEM数据,投影坐标系为WGS84-UTM44N坐标系,第一期POS数据纠正前正射影像与纠正后正射影像对比如图4所示。两期控制点与DEM坐标点位误差如图5所示。

图4 第一期POS数据纠正前正射影像与纠正后正射影像对比Fig.4 Contrast of orthophoto before and after correction of POS data in the first phase
通过图4可知用纠正后POS数据生成第一期正射影像的定位精度高于原始POS数据。由于目前的无人机没有搭载后差分POS数据处理系统,因此要纠正POS数据进行影像定位,提高定位精度。由图5可知两期地面控制点和生成DEM数据的对应监测点坐标的差值在毫米级别,控制点的误差基本控制在3 mm之内,说明其生成的坐标精度可靠,可以用于接下来的尾矿坝地表沉陷分析。
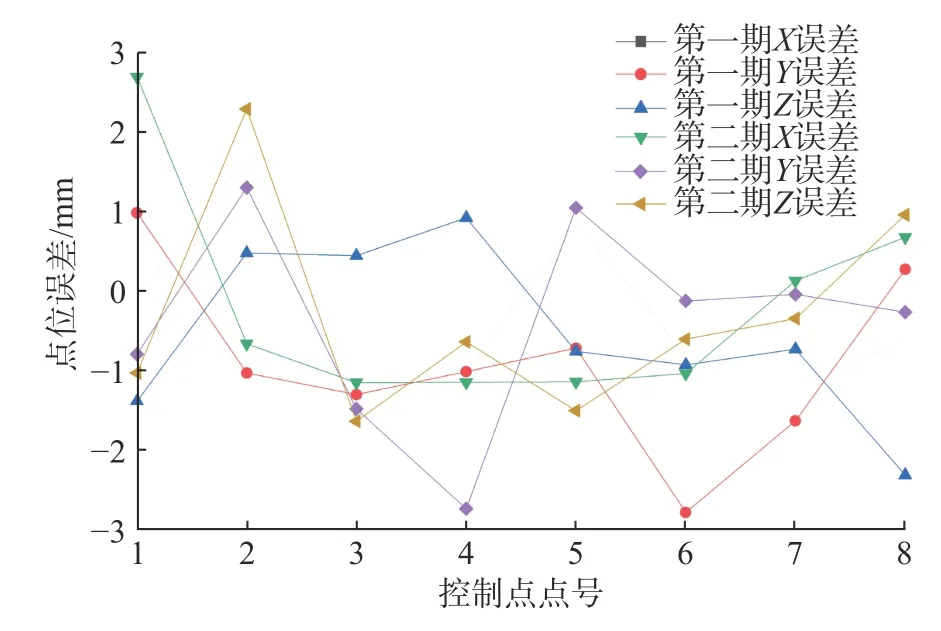
图5 两期控制点与DEM坐标点位误差Fig.5 Error between control points in two phases and DEM coordinates
4 尾矿坝地表沉陷特征
对本次研究区域进行位移沉降分析,首先需要得到DEM数据的坐标信息,生成的2018年8月2日及2019年8月5日DEM数据整体差值如图6所示。根据Pix4Dmapper软件生成的三维尾矿坝图如图7所示。
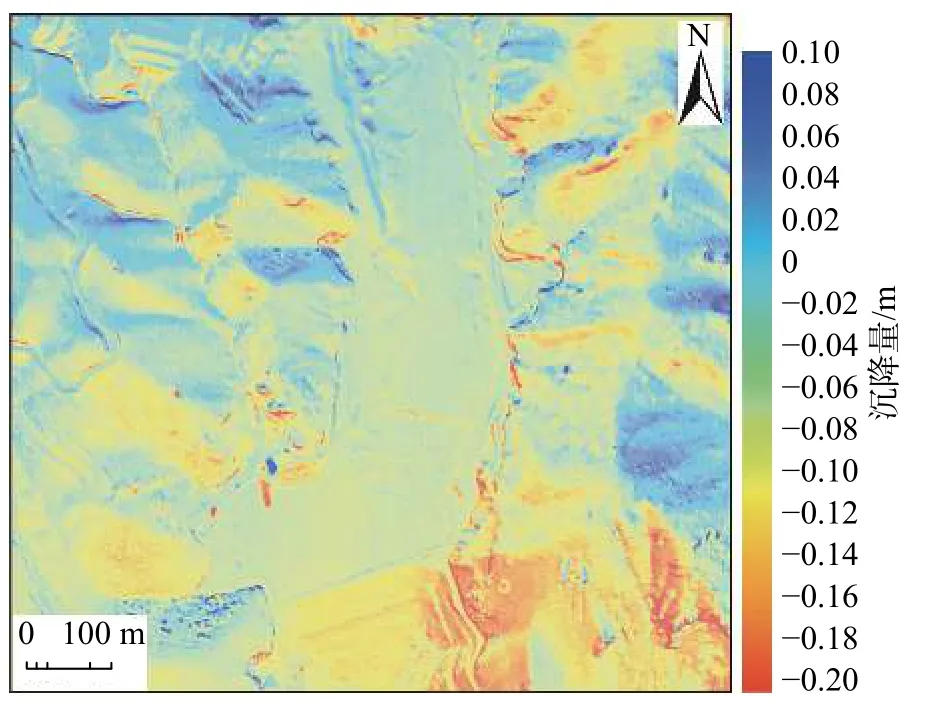
图6 两期DEM整体差值Fig.6 Overall DEM difference between the two phases

图7 三维尾矿坝图Fig.7 3D tailing dam
将尾矿坝两期DEM数据整体差值覆于数字模型表面上,经过ArcGIS平台的技术处理[25],得到尾矿坝整体沉降图如图8所示。

图8 尾矿坝整体沉降图Fig.8 Overall settlement of mine dam
对于尾矿坝整体的主要分析区域为0~120 m,Y=0~700 m地表高程的变化情况。为了分析研究区域地表塌陷区的沉降情况,对两期实验所得到的模型区域内,分别在Y=350 m、Y=100 m和X=60 m剖面线上,提取相应点的高程差值,分析其高程在三次监测情况下的变化,如图9、10、11所示。

图9 X=60 m剖面沉降图Fig.9 Settlement diagram of profile with X=60 m
由图8可知,尾矿坝整体出现了沉降,尾矿坝两侧山坡西坡受尾矿坝沉降及西南暖湿气流的影响,在南北或偏南北走向山脉的西坡和西南坡形成大量降水,出现沉降现象。由X=60 m剖面可知尾矿坝南坡沉降范围最大。由于尾矿坝内部存在矿区工业废水,经过一年的废水流失,以及该实验区降水量大,受日照及降雨影响,尾矿坝的地质发生了解构现象,导致了整体沉降。南部尾矿坝下坡是尾矿坝的坡顶区域,坡度大,降雨量受面广,受沉降位移的影响较为明显,加快了地表塌陷区的沉降。尾矿坝北部因为坡度小,受降雨及日照影响小,所以沉降范围小于南部。对于剖面Y=500 m,根据剖面线上各点高程的变化情况可知,此剖面线上沉降位移为0.08 m左右。分析其原因,主要是因为此剖面所处区域比较平坦,属于尾矿坝中部地区,沉降比较稳定。对于剖面Y=100 m,尾矿坝下坡沉降范围在0.16 m之内。
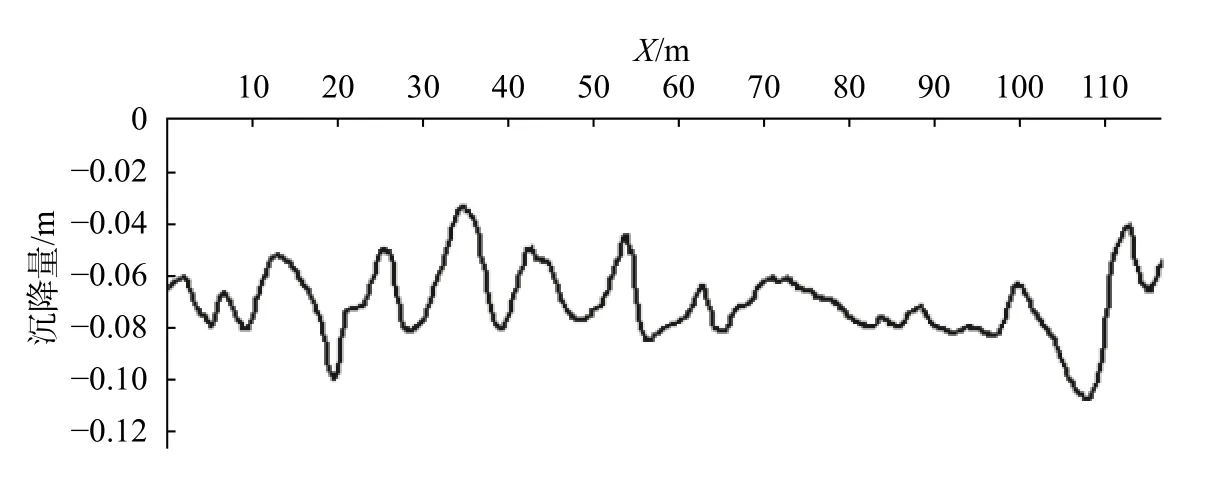
图10 Y=350 m剖面沉降图Fig.10 Settlement diagram of profile with Y=350 m
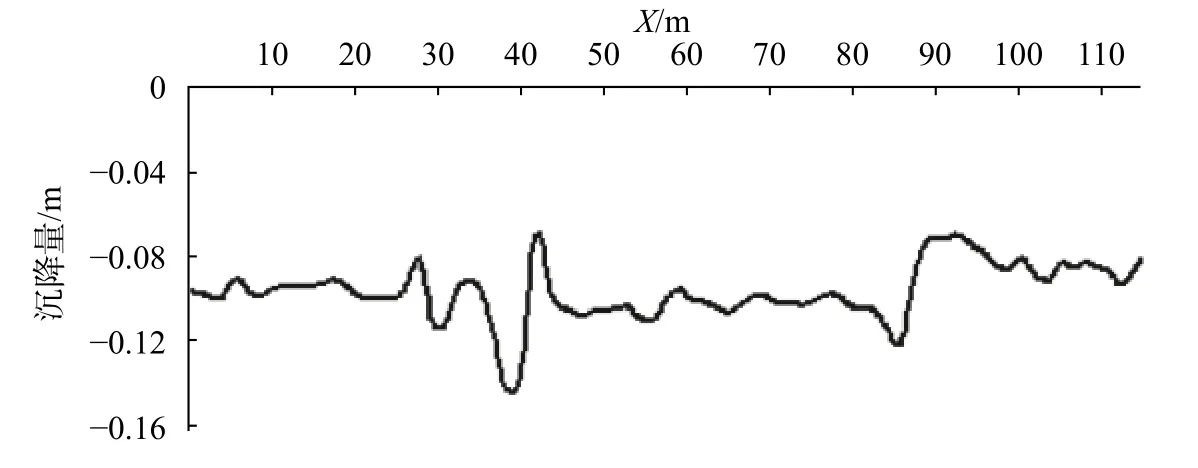
图11 Y=100 m剖面沉降图Fig.11 Settlement diagram of profile with Y=100 m
综上所述,当前利用无人机低空摄影测量技术为监测地表沉降提供了新的方法,比传统监测方式更加便捷。与传统监测相比,低空摄影测量技术能够从多角度进行影像采集,能够充分地获取监测区域的地形地物信息。
5 结论
文章基于无人机低空航摄技术获取实验区数据,并进行数据处理,利用高精度成图方法,得到实验区尾矿坝地表沉陷图。实验结果表明:
(1)通过改正原始POS数据误差,是可以提高无人机摄影测量成图精度的,这为无人机在精细测量方向上有更多的研究潜力。无人机成图精度并不是随着像控点数量的增加而增加,要根据实际情况做出决策。
(2)经过实际工程的应用,利用无人机监测尾矿坝地表沉陷的高精度成图方法获得的精度是可靠的,可以达到毫米级,这对现有监测手段是一种有效的补充。
(3)尾库坝安全监测一直是矿区安全生产的重要保证。由于光照、温度、雨量、风速和土壤质地等因子的综合作用,尾矿坝发生沉降,尾矿坝北部因为坡度小,受降雨及日照影响小,所以沉降范围小于南部。通过无人机低空摄影测量监测,对矿区安全生产起到一定的预警作用。需要指出的是,本次试验研究的是植被覆盖较少的尾矿坝区域,沉降变形主要靠人工识别和分析,下一步的研究工作将针对植被覆盖广的区域以及对矿区地质灾害信息进行自动识别和统计分析。
