一种基于模糊算法的水产养殖系统增氧机智能控制方案
2021-10-27许璐蕾
关 辉,许璐蕾
(苏州市职业大学 计算机工程学院,江苏 苏州 215104)
0 引 言
我国是一个水产养殖的大国,水产养殖业发展非常迅速。据农业农村部发布的2019年全国渔业经济统计公报显示[1]:2019年全国水产总产量达到6 480.36万吨,其中水产养殖产量5 079.07万吨,水产养殖面积7 108.50千公顷。然而,在我国水产养殖业迅猛发展的过程中也逐渐暴露出土地资源占有过大,水资源消耗过多,生产和管理方式比较粗放等问题,依靠传统养殖模式通过增加水产养殖面积来提高产量已不能满足绿色生态和渔业发展的长远需要。因此,充分利用物联网、云计算、人工智能等新兴技术来发展现代化水产养殖,实现精细化生产和管理,更加注重科技、注重生态环保、注重质量和注重可持续是今后水产养殖发展的重中之重。
近年来,一些水产养殖企业将物联网和云计算等技术应用到水产养殖系统之中。通过高精度的传感器采集养殖水域中的温度、pH值、溶氧度等环境数据,借助物联网和互联网传输至云计算平台,利用云计算技术对这些数据进行存储、分析和处理,并将处理结果实时反馈至手机客户端、Web页面等各类终端。从而帮助管理人员及时准确地掌握各种环境数据和异常预警,做出正确的控制决策。这种现代化的水产养殖系统大大提高了水产养殖的生产效率,节约了资源,有效促进了精细化水产养殖的实现。不过,这类系统中大部分只能实时展示或查询各种水环境的数据,在数据出现异常时进行报警,最终还是依靠管理人员人工做出决策进行相应设备的调控,智能化程度不高。也有一部分系统可以通过设定相关参数的阈值,当采集的数据值超出设定的阈值范围时,利用继电器控制设备的启停,从而在一定程度上实现了智能化控制。但是这种智能化控制存在着明显的缺陷,比如:溶氧传感器采集的水体溶解氧参数值低于设定的阈值时系统自动控制增氧机开启使之回归正常区间,而后自动关闭设备,过一会儿参数数值再次低于阈值时控制增氧机再次开启,回归正常区间后又自动关闭设备……,这样有可能使得水体溶氧参数值一直在设定的阈值上下反复波动引起增氧机频繁启停,造成设备磨损、缩短使用寿命等问题,无法实现精准调控。基于此,本文提出一种基于模糊算法的增氧机智能控制方案,通过两级模糊控制器智能调控变频器,由变频器驱动增氧机智能调整转速,实现根据养殖水体溶解氧参数值的变化自动调整控制策略,精准调节养殖水体中的含氧量,达到平滑控制的效果。
1 模糊控制
在现代控制理论中,实际生产系统往往具有较强的随机性或滞后性。比如水产养殖系统中水体的溶解氧参数就具有明显的波动性、趋势性、滞后性等非线性特征,依靠传统的控制方法很难达到让人满意的效果[2]。模糊控制是一种智能控制的方法,它以模糊集理论、模糊语言变量和模糊逻辑推理为基础,将工作人员在长期观察实践中积累的经验加以描述编制成模糊规则,然后将传感器采集的实时信号经过模糊化处理后作为模糊规则的输入进行模糊推理,最后将推理后得到的输出量经清晰化处理后加载到执行器上[3],其核心和关键即是模糊控制器。将模糊规则存入到知识库中,使用知识库对实际生产系统进行控制就可以得到模糊控制器[4]。
模糊控制器的整体结构主要由知识库(数据库和规则库)、模糊化接口、推理机和清晰化接口四个模块组成,如图1所示。
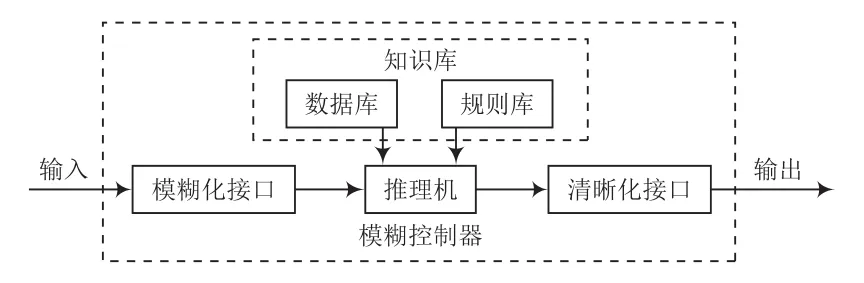
图1 模糊控制器结构
一般来说,模糊控制器将被控对象实际值和设定值的偏差以及偏差的变化率作为输入,通过隶属度函数将其转化为系统可以识别的模糊量,通过存储有大量人工经验转化而成的数据和控制规则的知识库进行推理,推理得到的控制量经清晰化后对控制设备进行控制输出。
2 模糊PID控制
PID控制是比例积分微分控制的简称,是较早发展起来的工业过程控制策略之一。其基本工作原理是将设定值r(t)与实际输出值y(t)之间的差异构成控制偏差e(t),把偏差按照比例P、积分I和微分D进行线性组合构成控制量u(t),从而对被控对象进行控制[5],表达式为:

式中:e(t)=r(t)-y(t)代表控制偏差;KP是比例系数;KI是积分系数;KD是微分系数。
PID控制工作原理如图2所示。图中:P(比例)环节主要针对系统当前误差进行控制;I(积分)环节则主要针对系统误差的历史进行控制;而D(微分)环节则主要反映系统误差的变化趋势,这三者的组合是“过去、现在、未来”的完美结合[6]。
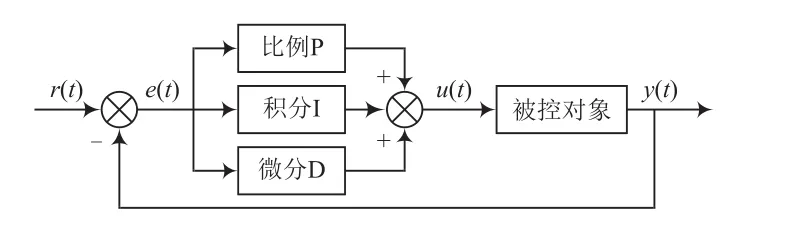
图2 PID控制工作原理
在PID控制器的基础上,利用模糊控制器对PID控制器的KP,KI,KD三个系数进行实时调整,就实现了模糊PID控制。具体过程是:将被控对象的误差e和误差变化率ec作为模糊控制器的输入,通过知识库进行推理得到ΔKP,ΔKI和ΔKD三个修正量,对PID控制器的比例系数、积分系数和微分系数分别进行修正得到新的KP,KI和KD,从而实现对被控对象的输出控制。
3 基于模糊算法的增氧机智能控制方案
在水产养殖系统中,监测水体中的溶解氧含量可以反映出水体的污染程度,尤其是有机物污染程度,它是判断水质好坏的重要指标之一[7]。渔业生产中,当溶解氧含量低于4 mg/L若未及时采取增氧措施,鱼类就会因缺氧窒息而大量死亡,造成经济损失。因此,在现代化的水产养殖系统中基本都会部署溶解氧传感器来监测水体的溶氧浓度,并根据溶氧浓度值的高低人工或者简单地设置阈值利用继电器控制增氧机的启停,以维持水体中溶解氧的含量在合理的区间范围。但这种控制模式智能化程度较低,无法实现溶解氧的精确调控,且容易造成增氧机的频繁启停,影响使用寿命。
本文设计了一种通过两级模糊控制器对变频器进行模糊控制,由变频器控制增氧机的电机转速来实现智能控制养殖水体溶氧浓度的方案。该方案基于模糊控制算法来自动调整变频器AVI端口的直流模拟电压,并进一步对变频器实施模糊PID控制,智能调整增氧电机的转速,从而实现精准调节养殖水体中的溶氧浓度的目的。系统的基本工作原理如图3所示。
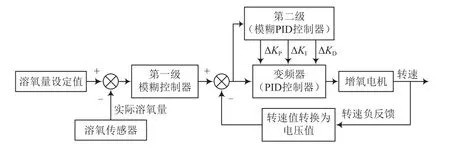
图3 增氧机智能控制系统工作原理
变频器设置为0~10 V电压控制,对应频率输出为0~50 Hz。不同的频率输出驱动增氧电机产生不同的转速,转速越快,增氧能力越强。
第一级模糊控制器将溶氧量设定值与溶氧传感器获取的实际测量值之间的偏差以及偏差的变化率作为输入,电压值作为输出,隶属度函数设置为三角形分布。偏差和偏差变化率通过隶属度函数按照负大NB、负中NM、零ZO、正中PM和正大PB五个模糊语言变量进行模糊化处理。根据水产养殖管理人员和技术人员长期总结的经验,输出电压值按照零ZO、正小PS、正中PM、正大PB和正极大PBB五个模糊语言变量。利用取小取大模糊推理法得到结果模糊集,编制出25条控制规则,形成模糊控制规则表,保存到知识库中,推理机利用查表的方法就可以查出输出的模糊值。通过重心法清晰化处理后转换为实际电压值,提供给变频器。
目前,大多数变频器都内置了PID控制器,将PID控制算法固化其中。第二级模糊控制器实际上就起到模糊PID控制器的作用,主要目的就是为变频器固定的比例系数KP、积分系数KI和微分系数KD进行在线优化调整,从而实现对增氧机更加精准的控制。由于增氧机是靠电动机拖动运转的,电动机转速越快则增氧功率越大,因此将增氧电机的实际转速值经过转换电路转换后得到一个相对应的电压值ΔU,以此作为PID控制器的反馈值。并将变频器输入的电压U与ΔU进行数值比较后得到模糊PID控制器的输入量偏差e和偏差变化率ec,把它们连续变化的区间范围划分为负大NB、负中NM、负小NS、零ZO、正小PS、正中PM和正大PB七个等级,隶属度函数设置为高斯分布,进行模糊化处理。模糊PID控制器输出的用于实时调整PID控制器KP,KI,KD三个系数的三个修正量ΔKP,ΔKI和ΔKD同样按连续变化的区间划分为NB,NM,NS,ZO,PS,PM和PB七个等级,隶属度函数设置为三角形分布。通过总结工程技术人员的知识和经验,并结合KP,KI,KD三个系数各自不同的特性和作用,获得ΔKP,ΔKI和ΔKD三个输出参数的模糊规则表,各49条规则,全部存入知识库。推理机经查询知识库就可以获得输出的模糊值,再经清晰化处理后即可得到实际的三个修正值ΔKP,ΔKI和ΔKD。这三个修正值输入到内置PID控制器的变频器与三个固定系数KP,KI和KD分别相加,即 :KP'=KP+ΔKP,KI'=KI+ΔKI,KD'=KD+ΔKD,从而实现在变频器运转过程中PID参数实时在线调整以达到“自适应”的目的。第二级模糊PID控制器控制流程如图4所示。
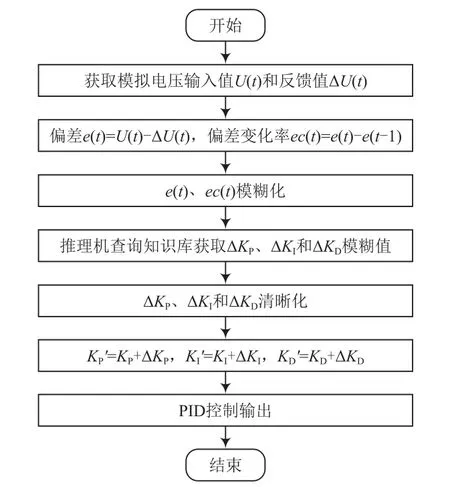
图4 第二级模糊PID控制器控制流程
通过两级模糊控制,第一级实现变频器输入电压的模糊控制,第二级实现变频器PID参数的模糊控制,从而实现了系统增氧机智能控制的方案。实验结果表明,该方案能够使增氧机电机转速响应速度更快,更快地趋于稳定,基本避免了超调,控制曲线更加平滑,溶氧值不会在设定值上下来回波动影响增氧机的使用寿命。
4 结 语
为了实现现代化水产养殖系统中增氧机的智能化控制,本文设计了一种基于模糊控制算法采用两级模糊调控、利用变频器驱动增氧机智能调速的方案。该方案结构简单,能够实现准确、平滑调控,运行稳定,有效减少了增氧机的频繁启停现象,延长了设备的使用寿命,在一定程度上提升了水产养殖的智能化水平,提高了生产效率,达到了按需自动控制、节约能耗的目的。
