基于状态空间平均法的非理想Boost 变换器建模与控制研究*
2021-10-26丁喜波
陈 昭,丁喜波
(哈尔滨理工大学测控技术与通信工程学院,黑龙江 哈尔滨 150080)
随着电力电子技术的迅速发展,电力电子系统的建模与控制技术越来越重要[1]。许多复杂的电路结构均是在Boost 电路结构上演变而来,对Boost电路进行建模研究,能够为其他复杂拓扑结构的研究提供借鉴意义。
王文斌等[2]利用了状态空间平均法,建立了理想状态下的Boost 变换器数学模型,对建立模型的准确性进行了验证,但是模型结构太理想化,不具备实用意义。王小方等[3]对隔离型的DC-DC 升压变换器进行了建模分析,利用状态空间平均法进行平均化处理以得到相应的模型,对模型进行了仿真验证,但是电路结构复杂,不利于其他电路结构的借鉴。皇金锋等[4]利用状态空间平均法对理想Boost电路进行建模分析,对建立的数学模型设计了超前-滞后补偿网络进行补偿校正,经过校正后的Boost变换器性能良好,为非理想型Boost 电路的建模研究提供借鉴指导意义。
利用状态空间平均法对非理想Boost 变换器进行建模分析并求解,根据求解的模型在控制系统中增加惯性补偿环节来改善非理想Boost 变换器的性能。通过仿真分析和样机实验测试,验证设计的控制系统模型具有良好的性能,能够使Boost 变换器的抗干扰能力增强、稳定性提高、动态和静态性能好。
1 工作原理分析
非理想Boost 变换器如图1 所示,rL为非理想电感内阻,rc为非理想电容内阻,Q 和D 均为理想开关。
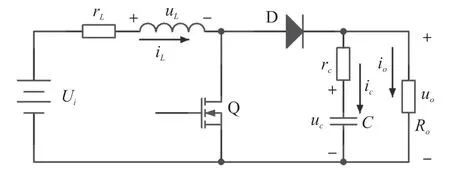
图1 非理想Boost 变换器
如图1 所示,对非理想Boost 电路工作在临界模式下进行分析,在整个开关周期Ts时间内,存在2个工作状态。
工作状态1 中,Q 导通,D 截止,电感储能,电容C给负载供电,整个工作状态经历时间为dTs。在此时间段结束时有
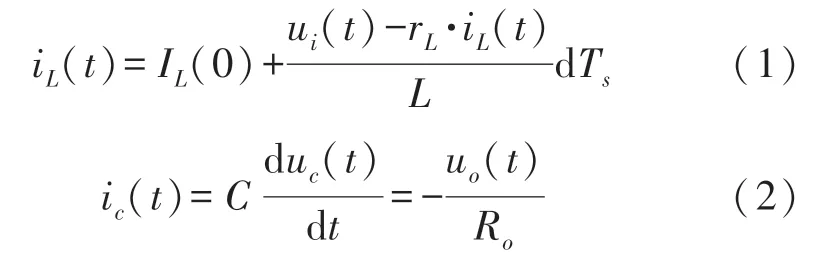
式中:IL(0)为电感电流初值,uc(t)和uo(t)代表电容电压和输出端电压瞬时值。
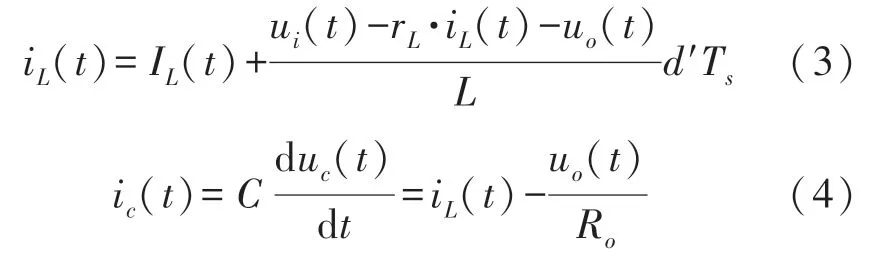
工作状态2 中,Q 截止,D 导通,电感和电源一起通过二极管给电容C和负载供能,整个工作状态经历时间为d′Ts,d′为工作状态2 的占空比。在此时间段结束时有
2 建立模型
对非理想Boost 变换器进行建模分析,根据式(1)~式(4),在整个开关周期内存在状态方程

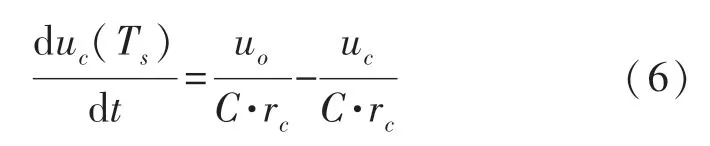
又可知,在输出侧有
引入交流小信号扰动,再经过线性化后可得状态方程[5]

电感在输入侧,电感电流平均值为输入电流平均值,因此有

式(7)和式(8)经过拉式变换后,求解输入到输出的数学模型

式中:d′为工作状态2 的占空比。控制到输出的数学模型

根据式(11)可知,控制到输出的数学模型Gv(s)中含有S右半平面的零点,使整个系统不稳定[6]。为了消除不稳定的零点,需要设计补偿校正环节对Boost 变换器进行补偿控制。
3 控制策略
如图2 所示为闭环控制系统结构,其中Gc(s)为补偿网络部分,Gv(s)为控制到输出的传递函数。

图2 Boost 变换器控制系统
为了对非理想Boost 变换器的性能进行改善,在补偿网络Gc(s)中设计相应的惯性环节来消除Gv(s)中的S右半平面零点,实现对整个控制系统的补偿。
根据式(11)可将控制到输出的数学模型Gv(s)转化为

式中:A、B、C、D、E和为传递函数标准形式的待求系数。
设计相应的惯性比例环节对数学模型进行补偿,设计补偿惯性环节为

式中:T、K为传递函数标准形式的待求系数,有惯性系数T=D=,常数K=-E经过惯性环节进行补偿后,可得稳定的Gv′(s)函数形式为

消去了S右半平面零点,实现了对整个控制系统的补偿。
输入电压Ui=9 V,输出端电容C=3 000 μF,rc=0.1 Ω,L=1 mH,rL=1 Ω,输出端负载Ro=9 Ω,占空比d=0.5。根据以上参数进行惯性补偿环节的设置,利用惯性补偿环节对非理想Boost 变换器控制系统进行补偿校正。校正前后控制系统幅频特性对比如图3 所示。

图3 校正前后控制系统幅频特性对比图
由图3 可知,增加惯性补偿环节之后,控制系统的增益裕度约为20 dB,相角裕度为35°,即增加校正环节后非理想Boost 变换器的动态性能和静态性能变好。
4 实验测试
利用PLECS 仿真软件对Boost 变换器进行仿真验证,在控制电路中设计惯性进行补偿,仿真电路图如图4 所示。其中运算放大器选用LM358 型号,输入电压为9 V,占空比d=0.5,额定输出电压为18 V,额定电流为2 A[7]。其中电阻R4和电容C1为补偿惯性环节,对控制系统进行补偿。

图4 闭环控制仿真电路图
在单位阶跃响应和负载扰动实验下,仿真结果如图5 所示[8]。
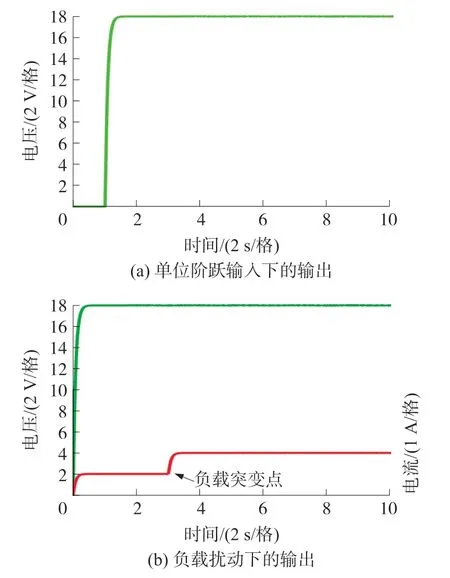
图5 仿真结果
由图5 可知,单位阶跃输入情况下,输出电压能够迅速稳定在18 V。在负载扰动的情况下,系统输出电流能够在35 ms 左右从1 A 过渡到2 A 且输出电压稳定在18 V。
在主电路控制芯片UC3843 内部误差放大器的2脚反相端和1 脚输出端加入惯性环节进行补偿,经过芯片内部调制[9-12],从而产生PWM 波。实验电路图如图6 所示,在UC3843 内部运算放大器的反相端和输出端增加了惯性补偿环节R7和C8进行补偿。

图6 实验电路图
根据上述参数制作实验样机进行测试验证,实验测试结果如图7。
根据图7 可知,在1.5 s 左右给定输入电压,输出电压能够在30 ms 内度过过渡过程,最后稳定在18 V。当输入电压出现扰动时,输出电压经过快速调节后能够稳定在18 V。在4 s 左右时负载突然出现波动,输出端电压能够维持稳定18 V,电流能够快速度过过渡过程,从1 A 稳定到2 A。实验测试验证了建立的模型在经过补偿校正后具有良好的动态性能和静态性能。

图7 实验测试结果
5 结论
利用状态空间平均法建立非理想Boost 变换电路的等效数学模型,根据建立的数学模型在控制系统增加惯性环节对非理想Boost 变换器进行补偿。对设计的补偿环节进行仿真分析和实验测试,验证了补偿后的控制系统使非理想Boost 变换器具有良好的动态性能和静态性能。
