青岛地铁11号线ATO节能研究
2021-10-26唐宁兴李文彬
唐宁兴,马 铮,李文彬
卡斯柯信号有限公司北京分公司,北京 100070
1 ATO节能原理
列车运行过程中须尽可能减少列车牵引时长,使列车长时间处于惰行状态,并减少牵引制动转换,以实现ATO节能目标。车载ATO系统通过ATS系统发送的下一站到站时间计算出区间剩余运行时间,与列车当前状态进行匹配,进而对后续的列车牵引制动状态进行控制。
目前青岛11号线列车ATO模式区间运行过程中采用了如下惰行控制策略,即当车在坡度加速或减速超出目标速度0.6m/s后,例如在上坡时,当车速降到目标速度-0.6m/s时,则一次制动提速到目标速度+0.6m/s。
测试版节能软件,为将节能运行时间与当前运行图时间匹配,对站间运行时间进行调整。
ATO驾驶列车策略与ATS的调度命令密切相关。ATO在站台接收ATS的命令如下:(1)当前站ID;(2)当前站发车时间;(3)下一站ID;(4)下一站到站时间。ATO可以根据上述信息,对比离线时计算的站间运行最小时间和ATS要求的到站时间,判断是否需要采用全速运行策略,或可以采用节能策略,并在运行过程中根据实际情况进行调整。
ATO根据不同的车辆性能、不同的行车间隔及供电方式,在满足准点到站的前提下,主要采取的节能方式为设置最低的巡航速度。列车的巡航速度越低,则其达到该巡航速度的牵引时间就越短,根据能量守恒原则,其消耗的电能就越少。
在线路坡度较陡,但坡度变化不多的区域,采用较小的恒定牵引力或制动力保持列车恒速,可以避免牵引和制动来回切换。检查点(CKP)原理如图1所示。
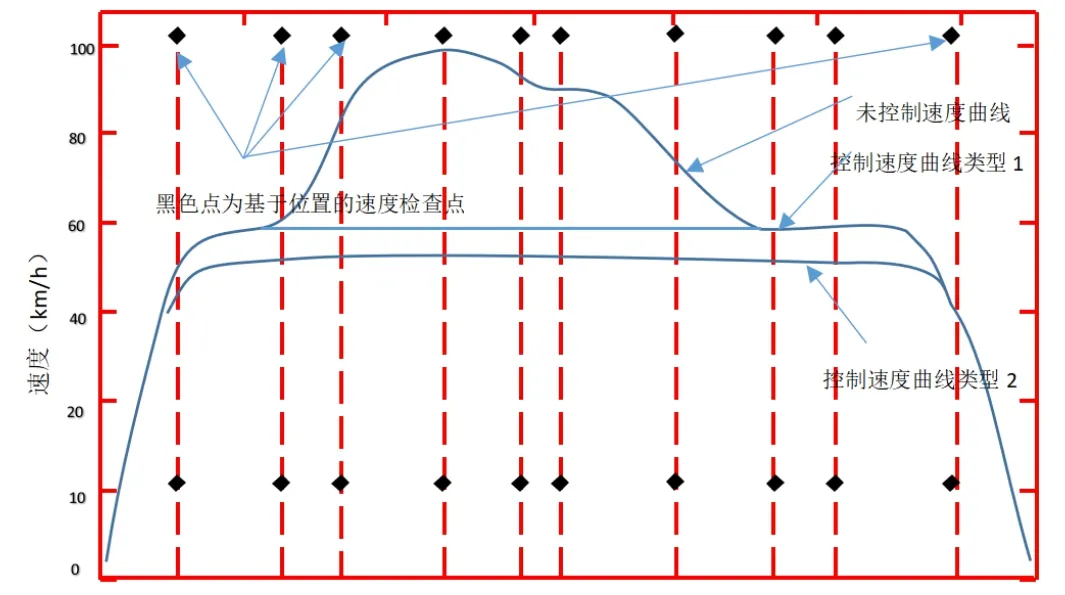
图1 检查点(CKP)原理图
离线会定义多条恒速的站间运行曲线,每条运行曲线被多个CKP点分割描述并存储于车载数据中。每个CKP点记录着不同的巡航速度以及不同的剩余到站时间。当列车经过1个CKP点时,根据到站的剩余时间,对上下两条运行曲线进行线性插值,计算出适合的巡航速度。
列车每经过1个CKP点,就会根据剩余时间计算出一个准点到达的平均速度,当列车的实际速度在平均速度上下一定范围内游离时,ATO将保持惰行状态,当列车实际速度游离到该范围之外时,ATO会施加牵引或制动命令,使列车回到该平均速度。调整速度原理图如图2所示,图2中虚线表示计算出的平均速度,两条实线中间的部分表示ATO保持惰行命令的速度范围,当列车的速度超过绿线范围时,ATO将施加牵引或制动命令加以修正。
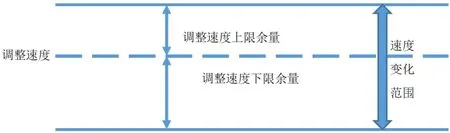
图2 调整速度原理图
Coasting为列车处于惰行状态,Recovering为列车施加牵引(或制动)命令,使列车的速度回到允许惰行的范围内,调整后的速度-距离曲线如图3所示。
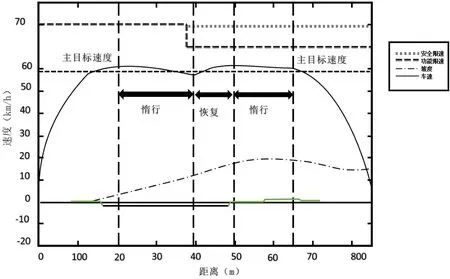
图3 调整后的速度-距离曲线
2 ATO节能测试结果
2020年12月4日晚1104车使用优化试验版车载软件进行了测试,同时与12月14日末班调试车1103车空载运行的能耗曲线进行了对比。
根据对比情况,上行鳌山湾-苗岭路试验数据有效,可以进行对比,上行数据对比如表1所示。
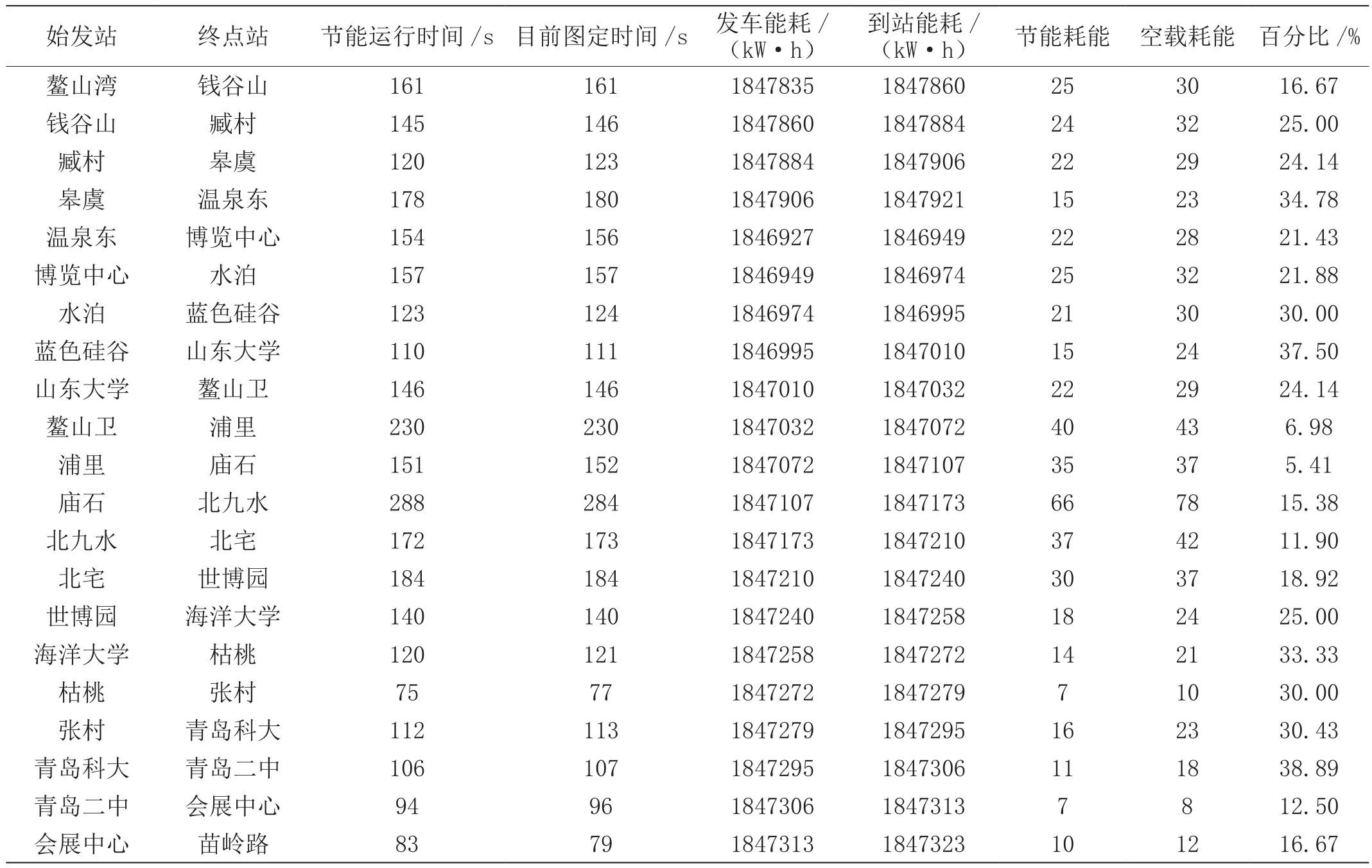
表1 上行数据对比
调整之后的节能软件,已经基本满足节能运行时间,与图定运行时间相符合,个别区间由于线路原因限制会超过图定运行时间1~3s,整体已经符合要求。
从目前的试验能耗数据来看,通过对比试验版车载软件与运营版软件的能耗,总体节能10%,图定运行时间也符合要求。目前尚未完成全周转的运行时间和测试,需要后续通过更多的测试进行能耗分析。
3 结束语
文章在现有列车自动驾驶算法的基础上,提出一种可实现的列车ATO实时优化节能控制算法以及ATS动态运行图调整算法,并进行现场动车试验验证,实现列车运行单圈(上行)牵引能耗降低10%。与此同时,下一步还需进一步优化节能运行图,统筹控制统一牵引供电分区内的列车运行,充分利用再生能量。对于具备能量反馈功能的列车,制动能量会反馈回电网,被同一供电区内的其他正在牵引的列车利用,利用此反馈机制,可对运行图进行再生制动节能优化,实现全线制动和牵引列车在运行图和实际运营时的最优匹配,将列车停车制动时反馈到电网的能量充分利用到同一时间段列车启动时的牵引供能,以减少全线列车总能耗。