一种球形轮智能家居机器人
2021-10-26高涵王志文唐源泽刘晶
高涵,王志文,唐源泽,刘晶
(华东理工大学机械与动力工程学院,上海 200237)
0 引言
普通的多轮驱动机器人在与人交互时常遇到一个问题,由于人体的身高较高,重心较高的机器人非常容易翻倒。为了解决这个问题,多轮驱动机器人需要调整其重心或者增大底盘面积,使得其在使用时产生了诸多不便。且在家庭等狭小区域,多轮驱动的机器人很少能实现全向移动的功能。但是球形轮驱动的机器人很好地解决稳定性和方向灵活性的问题,在一些平坦场所的使用前景广泛,除此之外,在基于球形轮驱动的底盘上部添加机械抓手等辅助功能,可以较好地完成家庭中家务工作的需求,更加方便了使用者的日常生活,是一种新型的实用型家居机器人。
1 总体结构设计
本文设计的机器人其主体部分可以分为上、中、下三层结构,每一层中间使用了亚克力板材料进行每一层的分割,层与层之间使用亚钛合金钢柱进行连接,保证了整体结构的稳定性,文中将分三层结构逐一介绍球形轮智能家居机器人的结构。
1.1 上层机械抓取装置结构
球形轮智能家居机器人上端采用了6自由度的机械抓手,使用了3个行程为50 mm的12 V直流电动推杆来进行机械臂的抓取和抬升,机械臂总体长度伸长达到600 mm左右[1],可以在球形轮的承载下在上部进行自由活动以进行物品的抓取,实现对于指定物品的拿取和摆放,进行家居物品的摆放归位和需求物品的自动拿取,这给腿脚不便的使用者(如老人、孕妇)带来了极大的便利。抓取机械抓手的质量只有115 g,在移动时减小惯性力,机械抓手的转矩达15 N·m,可以抓取最大的质量可达6 kg,基本可以实现居家内各种杂物的收拾和行动不便使用者基本生活物品的拿取。智能机器人的中上层结构主要用于支撑和容纳中层的控制结构和电池装置,以及自动充电接口的放置,最上层结构(如图1)主要用于连接电动机垫片,电动机用螺钉固定在最上层亚克力材质圆盘分隔板之上,电动机传动带动机械臂一段旋转,利用程序控制蓝牙模块,利用手机移动端控制机械抓手的旋转和运动方向,机械臂中端装配红外测距装置,可以自动控制与障碍物的距离进行准确抓取,同时也保证了机器人在家庭中工作的时候不会碰撞到使用者或者自己撞到家居导致人员的伤害或者对家居的损害。
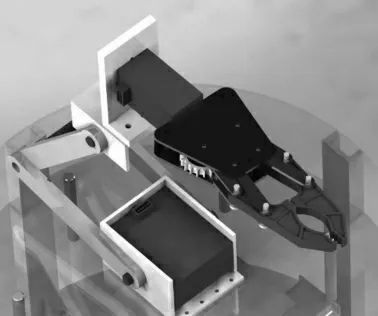
图1 上层结构
1.2 下段运行行走机构
下部结构是本机器人最有特色的一个部分,运用最下层的亚克力分割板,在其上装备3个电动机,电动机与水平面的天顶角成50°(如图2),3个成中心堆成的电动机连接3个球面运动型麦克纳姆全向轮,控制整个机构在球面上运动。在机器人的中部结构处加装陀螺仪、加速度计等传感器,用以获取整个机构的状态参数[2]。利用STM32控制板执行三驱动单轮自平衡算法,自动算取机构的实时重心以保证整个机器人系统在运动过程中保持平稳的运动。利用单轮驱动的原理进行运动,能保证各个方向的更平稳、快速的全方位运动。
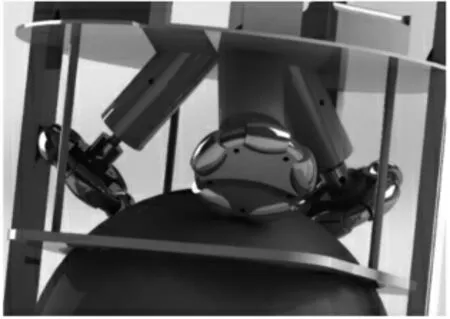
图2 球形轮驱动结构图
1.3 其他辅助结构的设计
如图3所示,当机器人停止运行时,启用侧方4个支柱中的支撑座支撑机器人的站立。支撑座由带有导向槽的支架、撑脚和约束运动的杆组成。支撑座由电动机驱动,支撑座使机器人可以在任意位置稳定静止或者在运行中暂时稳定,增加了机器人的实用性。
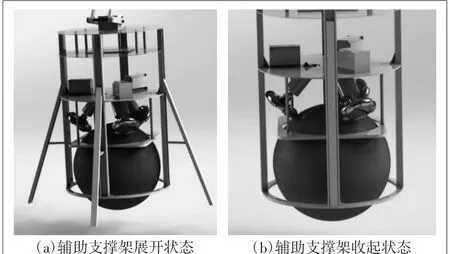
图3 展开和收起状态
1.4 总体结构的设计参数
机器人总体参数与支撑架参数如图4所示,机械手设计参数如图5所示,中层驱动结构参数如图6所示。
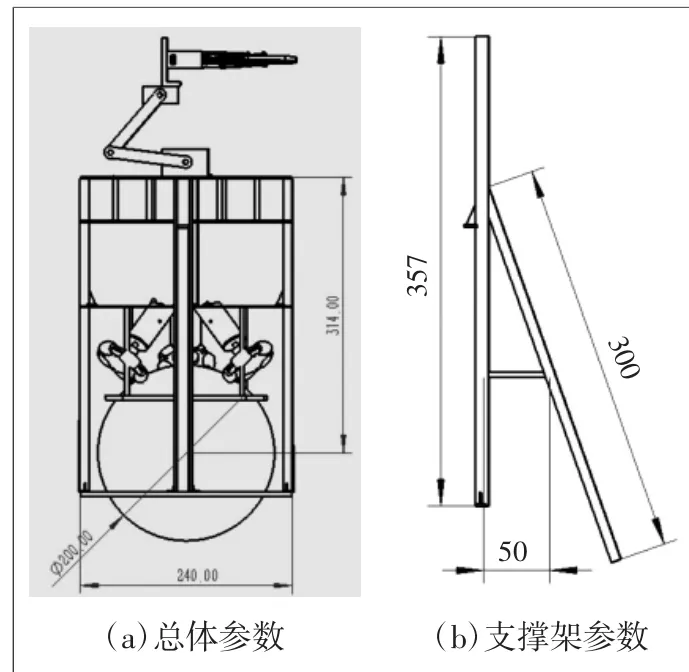
图4 总体参数与支撑架参数
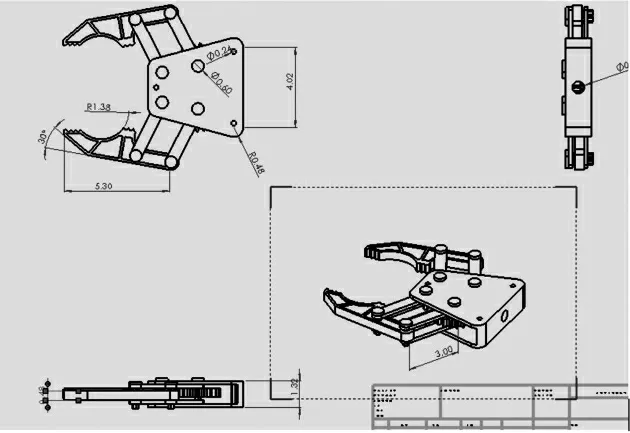
图5 机械抓手设计参数
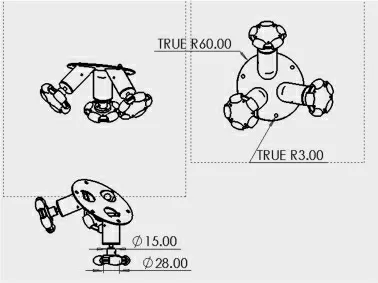
图6 中层驱动结构参数
2 控制设计
2.1 自主导航
在机器人操作系统(Robot Operating System,ROS)下采用即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)算法技术,可以使机器人柔性地在各个目标点间自主行动。具体操作如下:将使用SolidWorks软件绘制的机器人型导出为URDF格式,在ROS中调用此机器人模型。在树莓派上使用robot_pose_ekf(扩展卡尔曼滤波器)融合里程计、激光雷达和IMU的时时数据,在PC端使用Gmapping算法建立2D栅格地图,并将此地图用于自适应蒙特卡洛定位(AMCL)和move_base移动导航。在配置文件中设置最大速度、机器人半径、障碍物半径等参数。使用脚本在终端设置好目标点后将速度指令传给STM32进行PID电动机控制,并通过编码器获取电动机转速传回终端进行运算,得到速度、加速度、路程、相对坐标等运动信息,进行本地和全局的路径规划。由此可实现机器人导航至指定地点并能自主避开途中移动或静止的障碍物。由于球足机器人采用3个电动机驱动3个全向轮带动底部球足进行移动,其运动模型与常见的差速模型有较大不同,相关速度计算分析见第3节的运动计算,由此推导的相关速度公式应用于STM32上驱动3个电动机合理转动。
2.2 自动避障
球足机器人在移动过程中实时激光扫描建图,当路径规划途中出现移动或静止的新障碍物,雷达扫描得到新的点云信息,机器人会重新进行局部路径规划,从而达到自主避障的功能。具体实现算法是Dynamic Windows Approach(DWA),即在速度空间(线速度v,角速度w)中采样并模拟这些速度在一定时间内的运动轨迹,再通过评价函数对这些轨迹打分,选出最优的一组速度[3],再由这一组线速度、角速度计算出3个驱动轮的速度。
2.3 自主抓取物品
对于容易抓取的日常物品,机械臂接收语音提示后自主抓取。识别物品主要依靠深度学习和图像识别技术,得到物品轮廓和空间三维坐标后,进行机械臂运动学逆解,计算出机械臂各关节应进行的动作,交由主控板完成电动机控制抓取物体。
3 运动计算与验证
3.1 球形轮机器人的驱动原理
本机器人的驱动球轮大小类似于普通篮球大小,直径约为30 cm,质量达650 g,而本机器人的驱动原理采用了偏心距驱动原理[4],空载时利用了3个全向轮的差速运动从而对底盘的球轮载体施加了偏心力矩,使得球体随之开始运动;当上端结构机械臂开始运作或夹取物品时,外物本身的质量提供了一个偏心力,从而驱动球轮开始运动,而3个全向轮通过差速配合运动来保证整体的平稳性。
3.2 机器人的运动模型类似倒立摆模型
方向传感器以平台的水平倾斜角和加速度作为输入,通过程序数据处理后,将指令传达给3个步进电动机,控制3个全向轮的转向和速度,从而保持机器人整体的稳定。对于机器人的运动情况建模[5]:

指定空间坐标系,当机体在XOZ平面内倾斜θ角度时,通过传感器获取加速度ax和角度θ。全向轮的天顶角为φ。
则球在绕X轴转动的角速度为ωx时,轮1和轮2、轮3的转速[6]为:
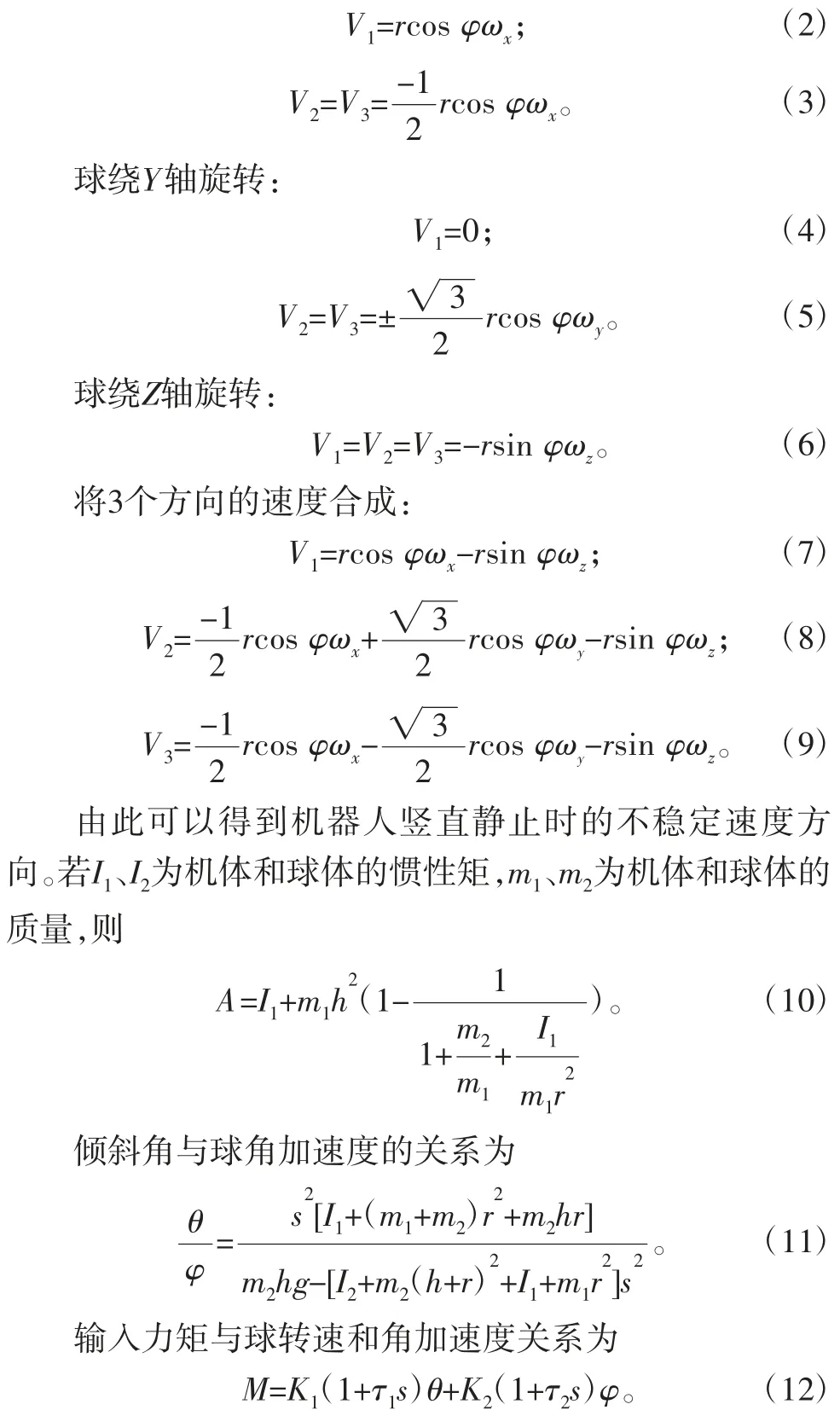
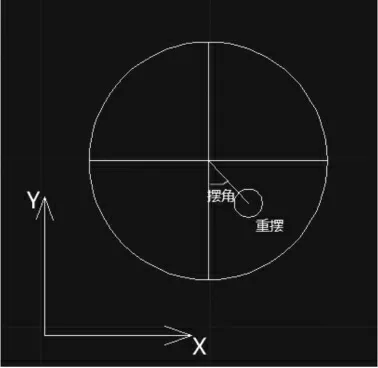
图7 偏心矩驱动原理简化图
由此可得输入速度与输出力矩之间的关系。
直线运动时,只需要保持机体在向运动方向倾斜θ角度,机器人的水平分力会使机器人沿倾斜方向产生加速度,通过调整程序参数使机体在运动过程中保持倾角不变,就可以实现定向移动的功能。
3.3 底盘配重分析
底盘球轮直径小,质量较轻,在上层抓取结构运作时较容易发生倾倒,为了解决这一问题,本设计在支撑电动机的3个支撑架上增添了电磁铁磁力装置,从而增大底盘的受力以增加底盘质量。
增加电磁铁装置的目的是希望3个成圆周排列相隔120°的电磁铁通过磁力的作用互相吸引,从而使得万向轮产生相对于底盘球面法向的压力,而压力垂直于地面方向的分力充当了向下的底盘重力,从而解决了底盘较轻、机器人在行走过程中不平稳的问题,而较小的磁力大小无法达到增加底盘质量的目的,过大的磁力质量会导致球轮行走阻力过大,电动机的功率无法驱动的问题。因此本文通过以下几组对比实验,选择出了最合适的电磁铁规格区间,如表1所示。
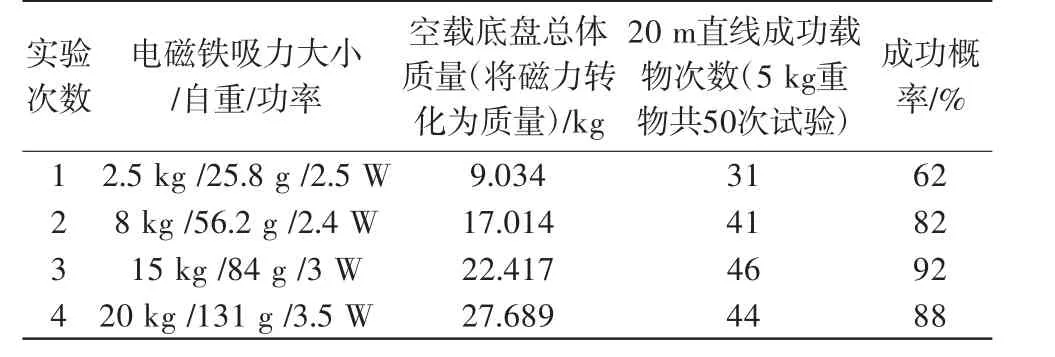
表1 实验对比参数
通过上述的对比可以知道,选择市面上已有的吸力大小15 kg、自重84 g、功率为3 W的电磁铁对机器人总体运行平稳性有较大的提高,故选择此规格。
使用3个直径为30 mm、功率为3 W、单个吸力达15 kg的小型电磁铁分别按中心排列模式堆排,圆周分布间隔为120°,直线间隔约24 cm,受力示意图如下,考虑电磁铁和伺服电动机自身质量(忽略全向轮的质量)及3个磁铁由于间隔所带来的的磁力减小影响,故F2(水平方向力)近似等于130 N,F1(垂直方向力)近似等于220 N,而相较与机械抓手在抓取家庭物品时的质量来说,底盘的整体重量在空载时达到了总体结构质量的74%~78%,在负载时假设负载的质量为5 kg,而底盘质量仍然达到了总体结构质量的58%左右。在普通家庭中的杂物质量一般不超过5 kg,相较于底盘的质量,抓取物品时所带来的重心偏移问题并不会影响到总体结构重心的偏移,从而保证了整体运动的平稳性。
3.4 自主导航
在室内环境中进行仿真测试,设定4个目标点,机器人依次自主前往,运动轨迹如图中红色实线,证明三轮驱动球足机器人的运动可行性。
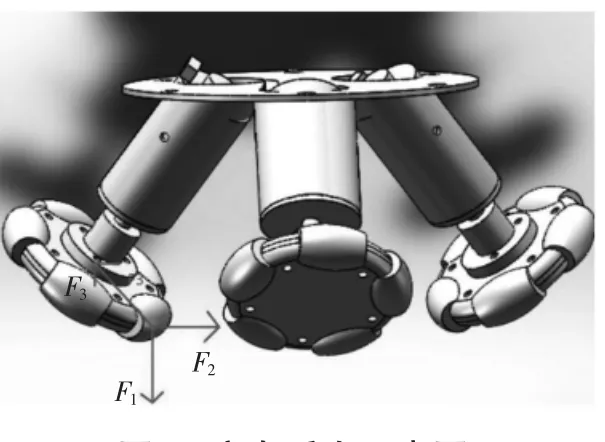
图8 底盘受力示意图
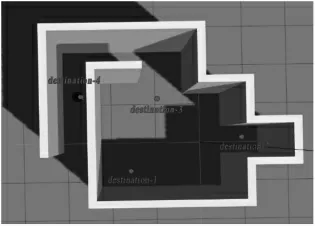
图9 目标行进点
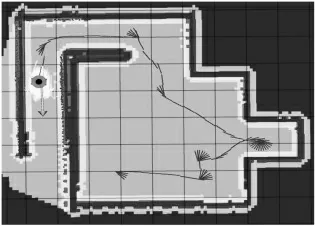
图10 仿真测试轨迹图
3.5 机械抓手受力
在抓取力大小为50 N的情况下机械抓手所受的应力较小,所产生的应变较小,可以完成室内物品的基本抓取。
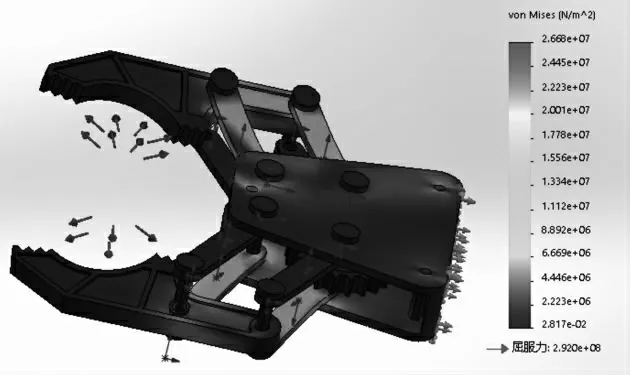
图11 机械臂所受应力分析示意图
4 结语
针对普通机器人移动不灵活、重心过高时不稳的问题,设计采用了球形轮驱动方式,实现了高重心的稳定平衡、原地转向、全向移动等功能。并对其运动模型和受力情况进行了计算和试验验证,为家庭等狭窄环境下的机器人需求提供了一种解决方案。
