基于nCode的绝缘子清扫装置清扫臂的疲劳分析
2021-10-26刘超颖陈鑫楠吴文江李斯张旭
刘超颖, 陈鑫楠, 吴文江, 李斯, 张旭
(1.石家庄铁道大学 机械工程学院,石家庄 050043;2.河北中医学院,石家庄 050200)
0 引言
接触网腕臂绝缘子露天设置,长期在复杂多样的环境中运行,环境中的粉尘、工业污染物等堆积在绝缘子表面,使绝缘子在雨、雪、雾、露等天气下极易发生污闪。绝缘子污闪容易造成铁路恶性停电事故,解决铁路接触网绝缘子的污闪问题对于保障铁路运输安全具有重要意义[1]。针对该问题,设计制做了接触网绝缘子清扫装置。作为清扫绝缘子的专用设备,设计的清扫装置既要满足相关环境的使用要求,又要符合设计要求。清扫刷头安装在清扫臂上,清扫臂与连接杆铰接,形成一个可旋转的结构,保证了清扫装置能够使用单个清扫刷头清扫两个腕臂绝缘子。清扫臂是清扫装置的一个关键部件,在实际工况中,清扫臂的某些部位会受到转矩作用从而出现疲劳破坏,保证清扫臂的使用寿命对于确保清扫装置的正常使用具有重要意义。鉴于此,本文针对接触网绝缘子清扫装置的清扫臂进行了基于nCode的疲劳分析。
1 疲劳分析的理论基础
疲劳是结构的某部分所受扰动应力,且在足够多的循环下产生微小的裂纹,在载荷的作用下裂纹会不断扩展直至发生疲劳失效的过程[2]。在循环载荷作用下,构件产生疲劳破坏所需的应力或应变的循环次数称为疲劳寿命[3]。
较为常用的疲劳分析方法有以应力-寿命(S-N)曲线为基础的名义应力法和以应变-寿命(ε-N)曲线为基础的局部应力应变法[4-5]。S-N曲线适用于高周疲劳即应力循环水平低、循环周次高的情况,是对长寿命疲劳性能的描述,而ε-N曲线则适用于低周疲劳。在实际工况中清扫臂属于高周疲劳,应用S-N曲线对清扫臂进行疲劳分析。清扫臂的疲劳分析流程如图1所示。
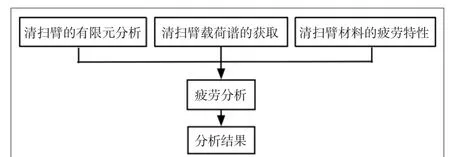
图1 清扫臂疲劳分析流程
2 清扫臂疲劳分析
2.1 清扫臂有限元分析
1)有限元模型的建立。采用ANSYS软件对清扫臂进行有限元分析,首先将SolidWorks中创建的三维模型导入到ANSYS,生成清扫臂模型。
2)定义清扫臂的材料及属性。接触网绝缘子清扫装置清扫臂的材料选取为碳素钢,密度为7.85×10-6kg/mm3,弹性模量为2×105MPa,泊松比为0.3,抗拉强度为980 MPa,屈服强度为785 MPa。
3)划分网格。划分网格是建立有限元模型的关键环节之一,在Workbench中选用四面体网格对清扫臂进行网格划分,首先根据清扫臂的结构,对清扫臂模型进行切分,再对清扫臂进行网格划分,模型中节点数为15 038,单元数为7290,生成网格如图2所示。
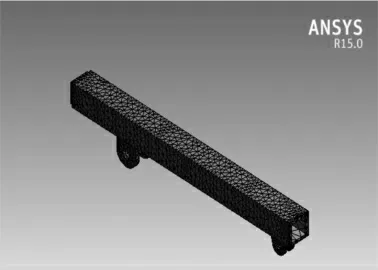
图2 清扫臂的网格划分
4)对清扫臂进行有限元分析时,将清扫臂近似看成一个简支梁,分析清扫臂的受力,根据平衡方程求解各力。平衡方程如下:
式中:F1为连接杆对清扫臂的支撑力;F2为电动推杆对清扫臂的支撑力;F3是为平衡F2在水平方向上的分力所产生的力;G1、G2分别为清扫臂两端受到的重力。
在清扫臂的通孔处施加圆周约束,清扫臂的受力情况如图3所示。
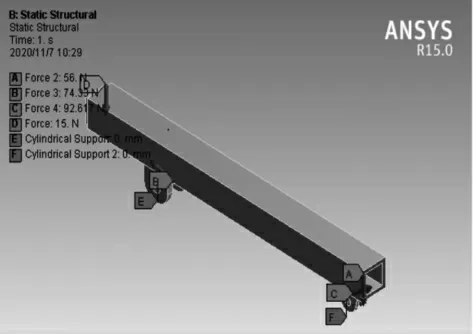
图3 清扫臂受力情况
5)分析结果。经过有限元计算求解得出清扫臂的应变云图、应力云图如图4 所示。由仿真结果可知清扫臂的最大变形量是0.000 31 mm;在最大工作载荷下的最大应力是0.535 59 MPa,小于碳素钢的屈服极限,清扫臂的强度满足设计要求。
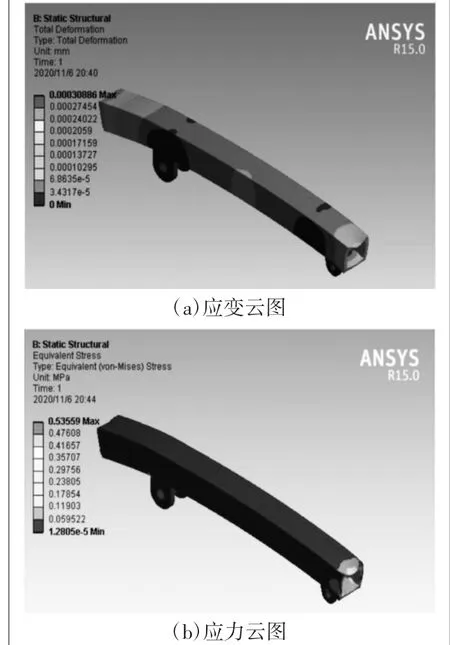
图4 清扫臂的应变云图和应力云图
根据有限元结果应变云图可知,清扫臂后端变形相对较大,因为步进电动机安装在清扫臂后端并且处于悬空状态,静载荷相对较大。但从数据来看,清扫臂实际变形量很小,且受到的最大应力仅为0.535 59 MPa,说明清扫臂还存在轻量化的空间。
2.2 载荷谱的编制
疲劳寿命预测的基础和关键是对清扫臂疲劳载荷的统计分析,载荷谱对于清扫臂的疲劳寿命分析非常重要,载荷数据定义了清扫臂的使用环境,也决定了疲劳分析的结果[6]。为对清扫臂进行疲劳寿命估算,需得到清扫臂通孔圆柱面所受的载荷谱。本文借助ADAMS对清扫臂进行动力学分析。
根据清扫臂的工况添加载荷,定义清扫机构的运动副。清扫机构多体动力学仿真模型如图5所示。

图5 多体动力学模型
设置采样时间为5 s,通过清扫机构的多体动力学仿真模型运算得到清扫臂的载荷时间历程,清扫臂的载荷时间历程曲线如图6所示[1]。
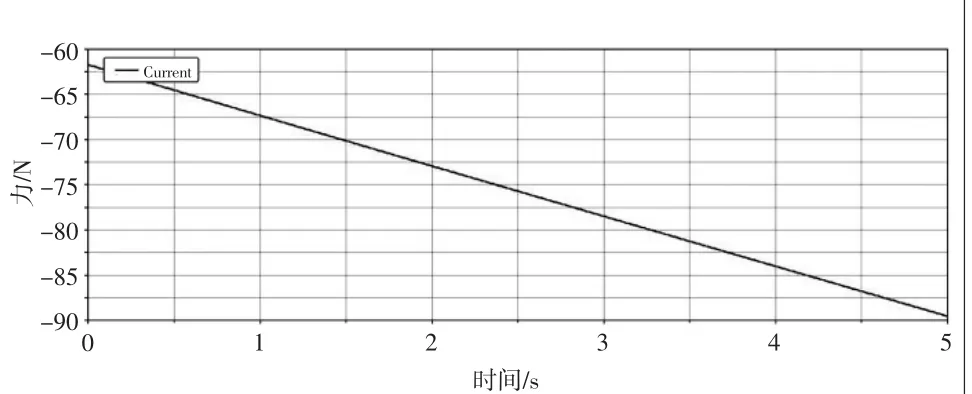
图6 载荷时间历程曲线
由载荷时间历程曲线可知,随着清扫臂的旋转,电动推杆在5 s内会对清扫臂产生60~90 N的推力,并且清扫臂旋转的角度越大,电动推杆对清扫臂产生的推力越大。
2.3 清扫臂S-N曲线的确定
S-N曲线是应力疲劳分析的基础,用来表示疲劳强度(疲劳极限)和疲劳寿命之间的关系。一般用S-N曲线表示材料的疲劳特性。S-N曲线采用幂函数公式SαN=C来表示,其中:S为应力;α、C为材料性能常数;N为应力循环次数。
根据碳素钢的材料属性,在nCode Designlife模块得出清扫臂的S-N曲线,如图7所示。
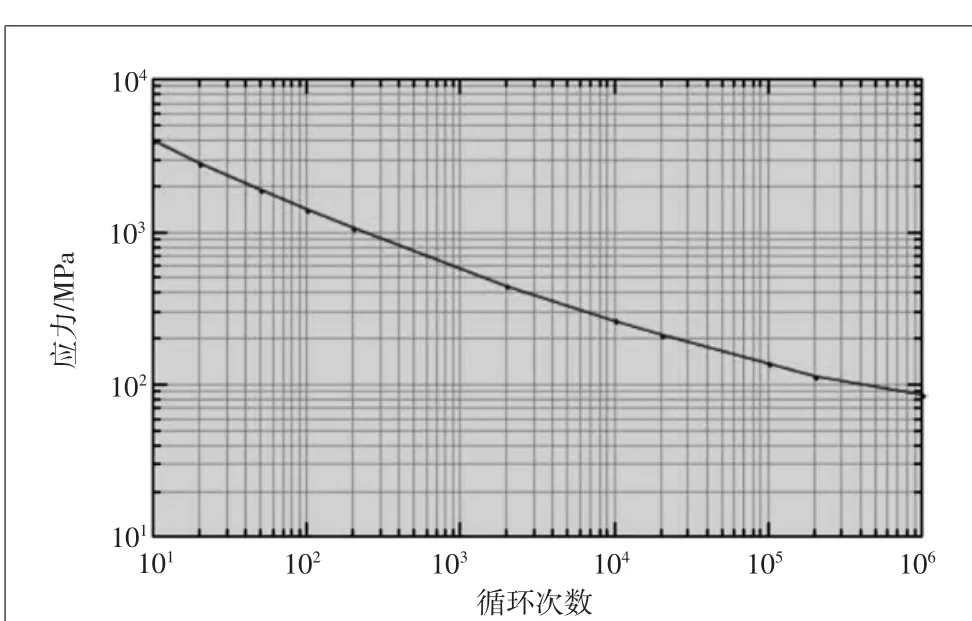
图7 清扫臂S-N曲线
3 疲劳寿命结果分析
在nCode软件中设置新的疲劳寿命分析流程,包括清扫臂的有限元分析、载荷时间历程曲线、材料的疲劳特性、分析计算、疲劳分析结果五部分,即疲劳五框图。首先在输入模块分别导入清扫臂的有限元分析结果及清扫臂的载荷谱,输入清扫臂的碳素钢材料参数,选择应力疲劳为计算方式,对清扫臂进行疲劳求解,将结果显示放到nCode的工作区域,完成清扫臂的疲劳寿命分析流程。
清扫臂的疲劳损伤云图和疲劳寿命云图如图8所示。

图8 疲劳损伤云图和疲劳寿命云图
由疲劳损伤云图可得,在规定的工况循环下,对清扫臂造成的损伤很小,相应的清扫臂的工作寿命完全能够达到工作要求。对疲劳寿命的结果分析,说明了清扫臂结构设计得过于保守,进而说明清扫臂可以进行轻量化的设计。对于清扫臂的优化,采用拓扑优化的方法。拓扑优化是在一个确定的连续区间内寻找结构内部的非实体区域位置和数量的最佳配置,从而寻求结构分布及节点连接的最优化,使得机构在满足一定的强度、刚度等约束条件下,某种性能指标值如质量最小等达到最优化[7]。后续如有需要,可以再对清扫臂进行详细的轻量化设计。
4 结论
通过ANSYS和nCode相结合,对清扫臂进行了疲劳分析,得到了清扫臂在最大载荷下的最大变形量,同时得出了清扫臂的应力分布规律及最大应力,结果显示清扫臂的强度寿命满足使用要求。对清扫臂的工作寿命分析可知,清扫臂的寿命达到了设计要求,同时还表明清扫臂存在轻量化的空间,为清扫臂的结构设计及优化提供了理论依据。
