基于无人机倾斜摄影的像控点优化布设方法研究
2021-10-25肖永东朱劲松
肖永东 朱劲松

摘要:文章论述了像控点在无人机低空倾斜摄影测量下的作用,分析了在不同的像控点布设方案下进行倾斜摄影建模数据采集精度的基本情况,统计了不同的像控点布设方式对数据精度的影响效果,并针对不同的工作需求,提出了相应可用的布点方案。
关键词:无人机 像控点 精度
引言
低空无人机摄影测量,尤其是倾斜摄影测量的兴起和普及应用,给传统的大比例尺数字化测图带来了极大的变革,其工作方式便捷灵活,效率高,成果直观,数据格式多样,符合新时期背景下国民经济规划建设等各领域对空间数据的多种需求。为进一步增强其实用性,需要在保证其先天工作优势的前提下不断研究其成果精度的提高方法,包括其飞行平台及飞行方式的改进、传感器及IMU设备的性能提升等。其中,像控点的布设方式也同样是影响着无人机摄影测量成果的重要因素,相较于传统摄影测量,无人机因其机身轻小、抗干扰能力弱、传感器畸变大且像幅小等原因,导致其所拍摄相片不稳定,倾角较大,为了保证覆盖及完整建模,往往需要更高的相片重叠度,且其地面像控点的布设方式也有所不同。
本文基于无人机倾斜摄影测量像控点布设的优化方面进行研究,着力于考虑如何在较小工作量的前提下显著提高其作业成果的精度。通过使用搭载了成都睿铂D2五镜头相机的大疆M600 PRO六旋翼无人机,采集选定实验区的地面影像,并采用不同的像控点布设方法进行倾斜模型建立,再通过模型上的检验点的数据与实测数据进行对比分析,研究不同的控制点模型下数据的总体精度及具体误差分布问题,为在实际生产作业中进行倾斜摄影测量布点作业提供可用的参考。
1.实验背景
1.1实验区状况
本实验区域位于云南省宣威市下的一个山村,总面积约500亩,测区东西走向,不太规则,测区为一面山坡,高差约30m,坡度较为均匀,村子里房屋多为新建混房,以2-3层为主,但建筑物比较密集。
1.2航摄参数设置
为保证模型精度,使用的相机的分辨率为6000*4000,相对航高85m,GSD为0.012m,重叠度航向80%,旁像75%,因电池续航问题,整个测区共飞行了3个架次。
1.3实测设备及作业方式
测区内像控点通过人工撒石灰的方式实现,检查点选择为实地明显地物特征点,像控点及检查点统一采用RTK设备现场采集,为保证精度,每一个点重复采集四次,并取其平均值作为最后成果。
2.像控點布设方案
本实验采取了无人机航测常规使用的非全野外布点方案,为保证像控点的可用性,选点时主要考虑其成像清晰、上空开阔、地势平坦且不易被遮挡及破坏等特征,通过对整个测区的踏勘及试验,共布设了13个像控点及遍布整个测区的20个检查点。并通过所采集像控点的位置情况,共设置了如下4种像控点布设方案,分别为:
a 四周布点法:只在测区的四周布设少量像控点,不考虑其内部情况;
b 中心布点发:只考虑测区中心位置少量布点,忽略测区边缘情况;
c 均匀布点法:全面考虑整个测区,数量适中;
d 加密布点法:在均匀布点的情况下,对测区控制点进行适当加密。
3.成果精度分析
3.1 质量评定方法及依据
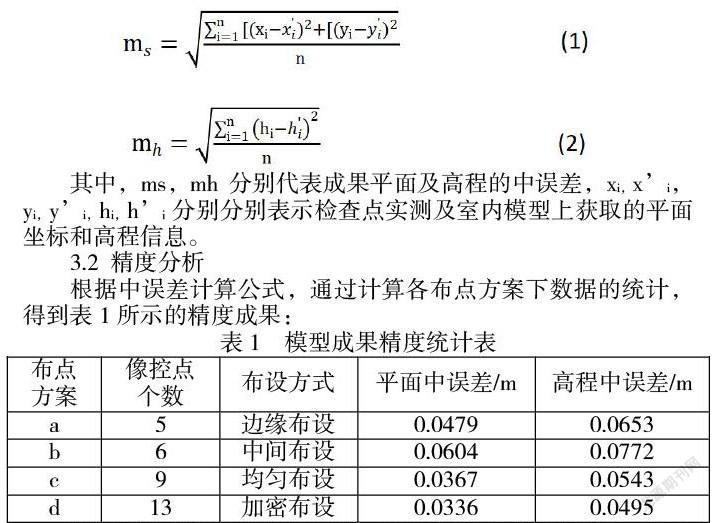
在进行外业摄影后,按照所采用的像控布设方式,分次采用ContextCapture平台软件进行数据处理,得到四种倾斜模型,并以此将其导入到EPS三维测图系统中,进行检查点的平面及高程坐标数据采集。采集完成后,将结果导出并用EXCEL表对其与对应RTK实测数据进行对比汇总,以计算对应各点的平面及高程中误差,具体计算公式为:
其中,ms,mh分别代表成果平面及高程的中误差,xi,x’i,yi,y’i,hi,h’i分别分别表示检查点实测及室内模型上获取的平面坐标和高程信息。
3.2 精度分析
根据中误差计算公式,通过计算各布点方案下数据的统计,得到表1所示的精度成果:
通过对检查数据的统计发现,四种像控点布设方式中,综合平面中误差最大为6cm左右,而高程中误差最大为约8cm,按照相关行业规范发现,这几种方案总体均满足1:500比例尺数字测图需求。但在具体精度分布情况下,方案a下检查点精度最高的地方为测区边缘处,平面位置为0.011m,高程为0.036m,而最差的位置是测区中间位置,平面达到了0.093m,而高程为0.124m;而方案b正好相反,检查点精度有中间到边缘变差,平面精度在0.015m至0.114m之间,高程精度则在0.048m至0.153m之间。而方案c和方案d的检查点精度分布就比较均匀,平面在在0.021至0.075之间,高程则在0.037至0.112之间。这说明像控点对模型数据的精度效果起到重要的控制作用。从表中可以看到,在数据精度质量上,加密布设方式最优,而中间布设方式效果最差;但从精度和工作量综合效果上看,最理想的方式则是均匀布设方式。
4.结论
本文所用实验区域面积相对较小,且地势均匀,具有一般的地貌特征。经过几种布点方案的设计及数据分析,可以得到如下结论:
(1)如果在满足基本精度的前提下要尽可能地减少外业工作量,可以考虑边缘法布点方案;
(2)如果最看重精度问题,则应该采用加密法进行布点,但当像控点数量达到一定程度时,其精度效果将趋于稳定;
(3)在精度与工作量综合的情况下,应选择均匀布点方式。
参考文献:
[1]张丽丽.无人机航摄前像控点布测方法探讨[J].测绘技术装备,2016(3):44—46.
[2]罗东山,李相庭,何军,等.无人机航测像控点布设对空三精度的影响[J].测绘标准化,2017,(3).34-36.
[3]班伟 无人机航测的像控点布设探讨[J].工程技术研究,2019,4(16).225-226.
[4]徐夏炎,答星等.无人机1:500数字航测成图关键技术研究[J].北京测绘,2019,33(3):328—332.
